相对重力仪高稳定性恒温系统的设计与实现*
2022-05-18王智奇吴宗坤宋丽薇朱学毅
王智奇, 吴宗坤, 杨 晔, 宋丽薇, 朱学毅
(天津航海仪器研究所,天津 300131)
0 引 言
高精度静态相对重力仪(后简称重力仪)是一种轻型化和便携式的重力异常测量仪器,可用于测量地球表面某一点的相对重力值,测量精度一般需优于20×10-8m/s2。
重力敏感器通过金属或石英零长弹簧等弹性结构实现重力测量[1]。而弹性元件的性能随温度变化,需保持工作温度稳定。为此,在研制重力仪时,通常会为重力敏感器设计高稳定性恒温控制系统,以抑制外界温度变化带来的影响。国外的LCR重力仪为重力敏感器设计了单层恒温系统[2],采用开关控制模式使温控系统精度优于0.05 ℃;CG—5和CG—6重力仪均采用两级恒温系统[2,3],温控精度优于0.001 ℃,具体算法未见报道。国内学者在90年代末曾针对德国Gs重力仪改进温控方案,采用模拟比例积分温控算法使重力敏感器的温控精度达到了0.001 ℃;Li J L等人[4]为某型航空重力仪设计两级恒温系统,采用模糊PID控制律实现一级温控精度达到±0.02 ℃;吴艳霞等人[5]针对DZW重力仪设计一种两级三路的温控系统,采用模拟比例积分的控制方法使内层精度达到了0.000 1 ℃;秦佩等人[2]针对ZSM6型重力仪设计双层的恒温系统,并采用模拟开关控制和PID控制组合模式使内层温控精度优于0.001 ℃。以上综述表明,相关学者在重力仪恒温控制领域均取得了一定的成果,但大多采用模拟PID或简单数字PID算法实现恒温控制,不利于实时调试和实现更高效的控制效益。
本文从热结构设计、热敏电阻选型、温度测量与控制电路设计和控制策略等方面入手,设计了一种两级三路高稳定恒温控制系统。并通过室温、高低温变温试验验证了方案的有效性。
1 恒温系统的热结构和热敏电阻选型
1.1 高精度恒温系统的热结构基础
便携式相对重力仪恒温结构应满足体积小和低功耗等要求,故采用被动散热方式,热量由内向外单向传递。本文采用的两级热结构如图1所示,圆柱筒式的热结构利于均匀加热和整体控制[6]。其中重力敏感器处于一级恒温环境中,采用杜瓦瓶作为保温层,使一级恒温环境的温度处于仪器中最佳条件下;二级恒温环境包裹着一级恒温环境,由轻质发泡聚氨酯做成保温层,起到抵御外界温度大幅扰动的作用,并设计外层恒温控制功率大于内层,以使外层更具抗干扰能力。为确保一级温控稳定性达到要求,在杜瓦瓶瓶口的上端增加一路温控环节,用于放置精密电路板,从而形成两级三路的重力仪温控系统。

图1 两级三路恒温系统结构
由于一级恒温子系统的热敏电阻布局于重力敏感器的空心区域,其对温度的响应具有空气阻尼特性。故一级恒温环节的模型可用一阶惯性加纯滞后环节表示[7],而二级和第三路恒温子系统的温控模型可近似为一阶惯性系统。采用阶跃响应法来测定一级恒温环节的惯性时间常数、纯滞后时间常数和增益系数。得到其数学表达式为
(1)
由式(1)可知一级恒温系统控制模型的惯性较大并具有较大延时特性,对温度的响应存在明显延时。因此,为了提升恒温控制的整体动态性能和恒温精度,采取了两级温控方案并需针对纯滞后特性设计控制算法。
1.2 热敏电阻分析与选型
实现恒温控制的关键之一是能准确敏感温度的微小变化量。根据温控精度应优于0.001 ℃要求,调研认为采用44008型热敏电阻作为测温传感器,其有以下特点:1)具有电阻—温度比系数较大的高灵敏度,满足不大于0.001 ℃温度变化的分辨要求;2)具有较好的长期稳定性,符合重力仪温控长期工作的需求;3)体积和响应滞后小,在空气中的响应时间小于10 s,利于其在重力敏感器中布局和温度采集。且其具有275 Ω/℃的高灵敏度,而且在很宽的温度范围内线性很好,在10~15 μA理想工作电流驱动下,符合线性高稳定、高精度控制系统对输入环节的基本要求。
2 温控电路和控制策略
2.1 高精度恒温控制电路
本文设计的恒温控制电路由热敏电阻(与精密电阻构成惠斯通桥式电路)、微功耗高精度仪表运放器、ARM控制器(对温度信息进行A/D数字化处理并实现数字控制策略)、驱动电路和加热片等构成。恒温控制电路的原理框图如图2所示。
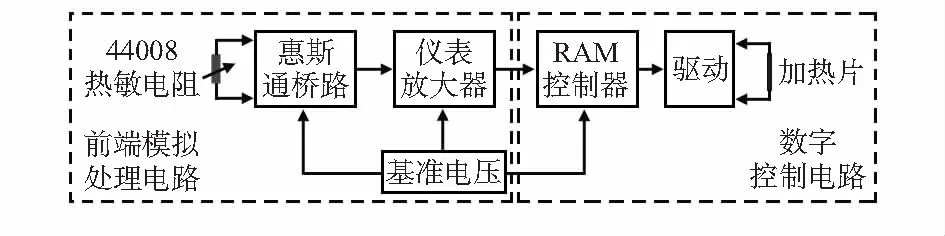
图2 高精度恒温控制电路原理
热敏电阻和高精度电阻构成的惠斯通桥式电路、基准电压和高精度仪表运算放大器组成恒温控制电路的前端模拟处理电路,用于温度信号采集与处理。其电路如图3所示。
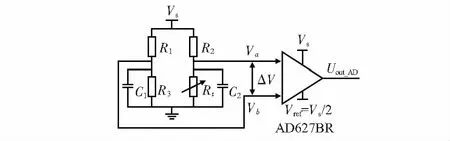
图3 前端模拟处理电路
从图3可以看出,桥式电路的两臂输出Va,Vb构成了差分输出值ΔV,其差分值ΔV存在共模干扰,必定带来误差影响。故从电路简化的角度出发,选择单片AD627仪表运算放大器作为前端处理器。AD627最大失调电压温漂为1 μV/C,差分输入阻抗较大,最大输入偏置电流为10 nA,对桥式分流几乎不存在影响,从而保证最小化误差影响。
由图4的桥式电路分析和推理可得仪表运算放大器的差分输入ΔV表达式为
ΔV=Vb-Va
(2)
式中R1,R2,R3为桥路精密电阻,Rt为热敏电阻,ΔR1,ΔR2,ΔR3,ΔRt为桥路电阻和热敏电阻的误差值,而惠斯通桥式电路可有效抵消测量误差。此外,在桥路两臂配置C1,C2电容抑制高频噪声干扰。桥路差分信号经仪表运算放大器AD627后输出信号的数学表达式为
Uout_AD=ΔV×(5+200 kΩ/RG)+VREF
(3)
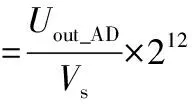
式中RG为仪表运放增益电阻,VREF为仪表运放参考电压。采用高精度的电压基准芯片同时为惠斯通桥式电路、仪表运算放大器的电源和参考电压端(为电源电压的一半,即VREF=Vs/2)提供同步稳定的电压基准,抑制电压波动对温度—电压输出量的影响。采用TM4C123GH6PZ芯片作为主控处理器,以其自带的12位A/D对温度信号采集。A/D转换数学表达式如下所示
1.1.1 纳入文献标准 ①随机或非随机病例对照研究;②研究主题为比较SuperPATH入路THA与传统入路THA的临床疗效优劣;③均有明确的疾病诊断标准;④研究设计合理,统计方法正确;⑤直接报告了手术出血量、手术时间和术后功能评分,或可以通过文中提供的数据进行计算;⑥研究人群年龄为18周岁以上,国籍、种族和病程不限。
(4)
式中D为数模转换的数字量,12位A/D模块的参考电压为Vs。将式(2)代入式(3)可得
D=
(5)
采用统一的稳定电压基准后,数字量D与桥路电压、运放参考电压和A/D模块参考电压无关,转换量误差主要来源于桥路各电阻,利于提高测温精度。
2.2 温控算法
对于存在较大时滞的一级恒温子系统设计一种分段式Smith-PID复合温控算法,以期消除控制模型中的延时环节对控制品质的影响;二级和第三路恒温控制子系统采用分段式数字PID算法控制[8]。基于Smith-PID算法的恒温控制框图如图4所示。
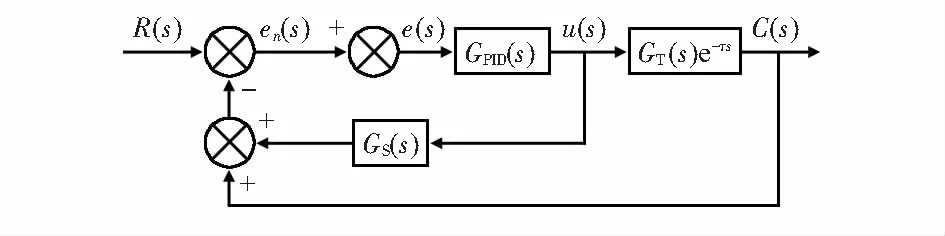
图4 闭环控制示意
图中GPID(s)为PID控制器的传递函数,GT(s)e-τs为恒温系统的传递函数,GS(s)为Smith预估计控制器的传递函数。则恒温控制闭环系统的传递函数为
(6)
(7)
从式(7)可以看出,引入Smith预估计补偿可消除闭环特征方程中的滞后环节,进而有利于提高恒温系统的控制品质。
3 试验验证与结果分析
将温控系统和其他功能模块按设计要求构成功能完整和工作正常的相对重力仪,真实验证包括重力仪本身产生的热量影响在内的温控性能。
1)室温试验验证
在同一实验室条件下,分别考核两种算法在同一恒温热结构中的恒温控制效果,考核曲线见图5。
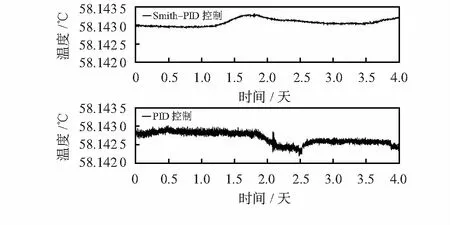
图5 高稳定性恒温系统的静态试验结果
从图5可以看出, Smith-PID和PID控制算法均可实现恒温稳定性优于0.001 ℃的控制效果,且前者优于后者,恒温稳定性达到0.005 ℃/天。
2)高低温试验验证
在同一恒温热结构中,分别考核验证两种算法在同一理想PID参数下的温控系统抗-20~+45 ℃高低温干扰的性能。试验结果如图6所示。
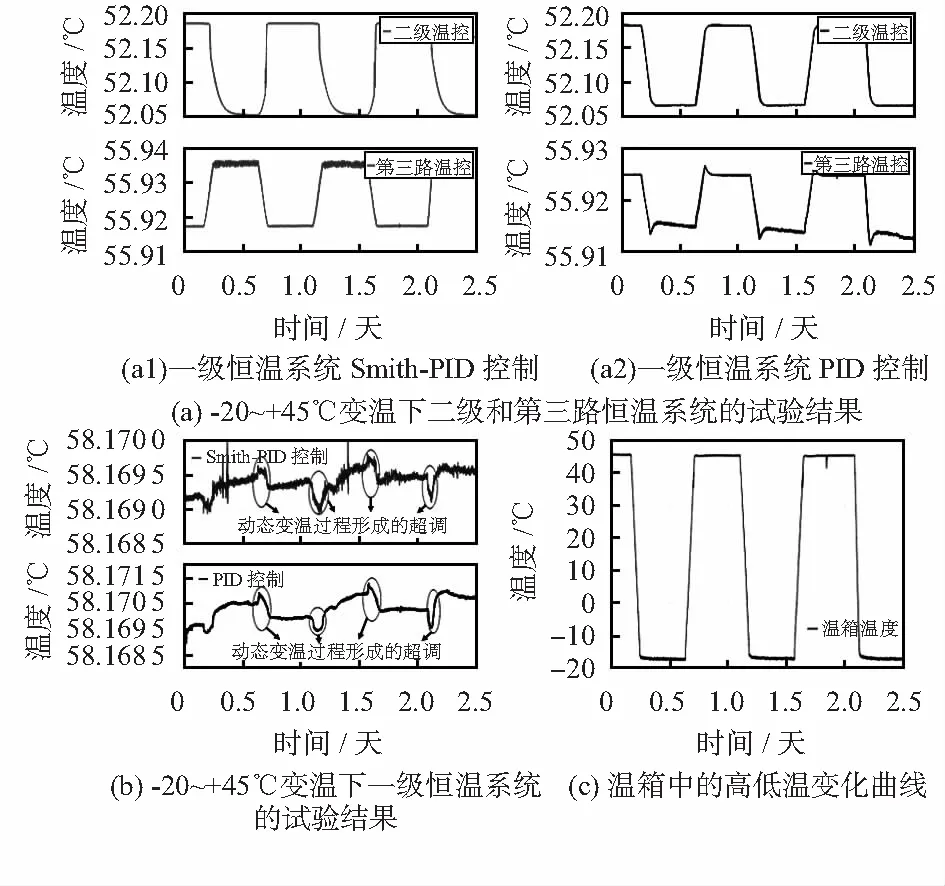
图6 高低温试验结果
从图6(a),(b)可以看出,在-20~+45 ℃的变温条件下,此重力仪整体恒温系统的功率设计满足实际工作需求。在二级和第三路恒温子系统恒温控制精度分别达到0.2,0.02 ℃以内的条件下,单一PID控制算法动态控制效果较差,无法实现一级恒温系统温度稳定性达到0.001 ℃的控制效果,特别是在动态变温的过程中出现较大的超调量;而Smith-PID复合控制算法可发挥其消除滞后特性的功能,提高了控制响应性和动态控制效益,整体控制稳定性更强,变温过程中的控制超调量大大减小,使一级恒温系统在外界-20~+45 ℃的变温影响下实现温控稳定性优于0.001 ℃。
4 结 论
根据自研弹簧式相对重力仪的重力敏感器工作温度稳定性优于0.001 ℃的要求,设计了一种两级三路高稳定性恒温系统。本文采用比率桥式测温电路方法实现高精度温度测量与转换,在重力仪温控领域首次创新设计分段式Smith-PID预估补偿的复合控制算法,消除控制系统的延时影响,提高恒温系统的控制品质。经过试验考核结果表明:静态温控稳定性优于0.000 5 ℃/天,在-20~+45 ℃的全温条件下温控稳定性优于0.001 ℃。
