一种基于UWB技术的室内人员定位系统
2022-05-18曼茂立
赵 玮,田 辉,曼茂立
(河北石油职业技术大学 机械工程系,河北 承德 067000)
随着社会信息化速度的加快,尤其是人工智能技术的飞速发展,对人们的实时位置信息提出了更高的要求。传统的定位方法,例如GPS定位技术和RSSI定位技术[1],虽可以实现人员在室外环境下的定位,但由于GPS信号的穿透力差[2]及室内的复杂环境导致无法对室内人员进行定位,并且GPS定位精度在10 m左右,远远达不到室内人员的定位精度要求。UWB定位技术与传统的WIFI、RFID[3]及Zigbee定位技术相比,具有穿透能力强、抗干扰性强、定位精度高等优点,成为目前室内定位的关键技术。本文通过UWB定位芯片,实现了室内人员的精确定位。
1 UWB定位系统的结构
UWB定位系统主要由标签和基站构成,整个系统内的固定基站数量不少于三个,基站与标签间采用超宽带信号进行通信来确定标签的实际位置,同时可以通过串口通信的方式将标签的实际位置信息传递到上位机中,系统的结构示意图如图1所示。
系统的硬件部分是基于STM32F401控制器和DW1000[4][5]超宽带无线收发模块,在进行定位时可以通过标签上的OLED显示屏看到实时的位置信息,并且通过串口通讯的方式将位置信息上传到上位机中。系统的硬件实物图如图2所示。


2 TDOA无线定位算法

TDOA(Time Difference of Arrival)是一种基于到达时间差进行定位的方法[6],通过测量信号到达基站的时间差来确定标签的位置。TODA定位算法是对传统TOA算法的改进,不需要加入专门的同步时间基站,定位精度也有所提高。TDOA测距的原理如图3所示。
其中基站1~基站4的坐标(xi,yi,zi,i=1,2,3,4)为已知,接收来自标签发射的UWB信号的时间ti(i=1,2,3,4)可由设备测得,那么可以得到四组定位基站两两之间的距离差:
(1)

(2)
在进行实际测量时,可以将四个基站分别放于原点、x轴、y轴和z轴上,那么(2)式可以变为(3)式,大大加快计算的速度。
(3)
3 定位数据的传输

定位数据的传输包括定位模块与单片机的通信和单片机与上位机的通信,通信结构示意图如图4所示。



4 系统定位精度的测试
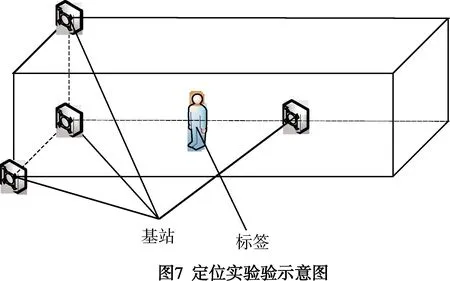
在楼道内选择一个长14 m、宽3 m,高1 m的空间为测试场所对搭建的定位系统的功能进行测试,并将4个基站分别放置于零点,x轴、y轴和z轴上,其基站的位置示意图如图7所示。
为了实现三维定位功能,在进行定位精度测试时,四个基站的位置不能移动,其坐标分别为:(0,0,0)、(0,0,0.6)、(2.8,0,0)、(0,14,0),通过不断移动标签的位置来观察上位机软件中标签与基站的位置变化。
在进行整个系统的定位精度测试时,选取10个测试点,在移动标签的位置时,在标签和基站间摆放一些障碍物,每次读取测量值都要记录实际位置(真实坐标)和测量位置(理论坐标),然后分析其定位精度。表1展示了10个采样点的真实坐标、理论坐标及误差的大小。
根据表1中的真实坐标与理论坐标可以看到,真实坐标与理论坐标在x、y、z方向上的误差均小于0.15 m,每个采样点的真是坐标与理论坐标的误差值均小于0.2 m,这表明整个UWB定位系统在进行人员的室内定位时具有很高的精度。如果考虑到室内的障碍物及UWB信号的收发对结果的影响,可以适当增加基站的数量从而减少误差。
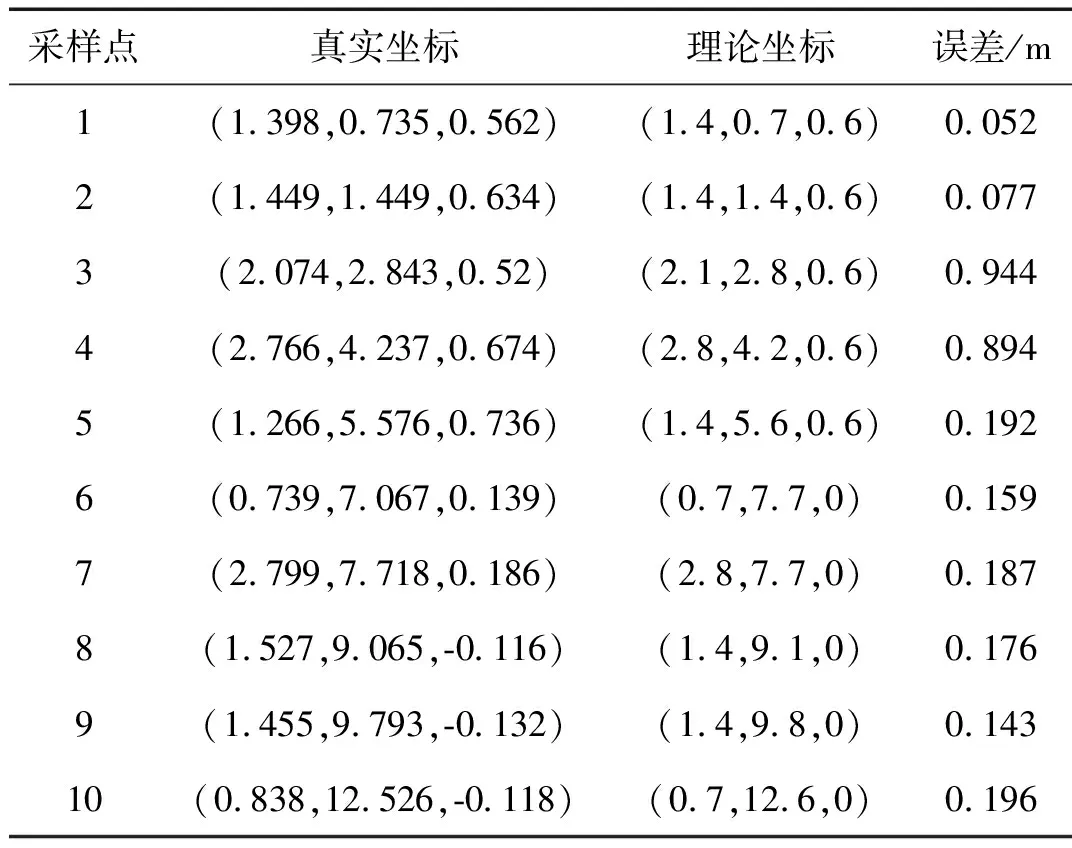
表1 采样点的理论坐标、真实坐标及误差
5 结语
本文以STM32F4单片机为主控器,DW1000作为定位模块搭建了基于UWB技术的室内人员定位系统,该系统包括一个上位机、一个标签和四个定位基站,通过标签、基站和上位机之间的数据通讯来实现室内人员的定位。在选取合适的定位环境基础上设计了定位实验,实验表明,该系统的定位精度小于0.2 m,满足室内人员定位的需要。
