ACPSO 和分层定位模型在含PV 配电网故障定位中的应用
2022-05-18杨洪杰张尚德赵梦琪
宫 宇,张 莲,李 涛,杨洪杰,张尚德,贾 浩,赵梦琪
(重庆理工大学 电气与电子工程学院,重庆 400054)
0 引言
配电网故障定位是智能配电网建设的重要内容,对于快速恢复用户供电、改善供电系统运行的可靠性有重要意义[1-2]。由于大量可再生、无污染的PV 接入配电网,导致只具有一个电源、潮流单向流动的传统配电网变为了拥有多个电源、潮流双向流动的有源配电网[3]。当发生故障时,含PV 的有源配电网故障特征与传统配电网相比发生了一些变化[4]:①故障后配电网的潮流方向会被PV 的接入位置影响,同时接入容量直接对故障电流的贡献能力产生影响[5];②PV 的出力具有不确定性,易受到光照强度的影响[6]。
当含PV 的配电网发生故障时,安装于各开关节点处的馈线终端单元(feeder terminal unit,FTU)能够将实时获取的故障电流信息上传至系统[7]。目前,主流的故障定位方法均基于FTU,主要包括直接法和间接法。直接法虽然具有原理简单、容易实现的优点,但计算量大、容错性差导致其不受关注。间接法是指粒子群算法、混合蛙跳算法、神经网络、细菌算法、免疫算法等各种智能算法。陈磊等[8]提出了一种基于二进制灰狼算法的配电网故障定位方法,但具有后期收敛速度慢、局部搜索能力弱等缺点;许峻宁等[9]利用蝙蝠算法和差分进化算法来进行配电网故障定位,虽然能够定位故障,但存在畸变信息时其准确率较低;宫宇等[10]和郑涛[11]等分别利用免疫算法和粒子群算法进行故障诊断,虽然能够取得全局极值,但方法的准确率较低,容错性较差。以上方法虽然能够定位故障,但都只能应用于单电源的配电网中,当维度增大后求解过程会变得困难。当PV 接入配电网后,配电网的结构更加多变,因此迫切需要一种新的故障定位方法。
针对上述方法的不足,提出了一种基于自适应混沌粒子群算法的含PV 配电网分层故障定位方法。首先,建立含PV 配电网的故障电路编码,分析各种光照强度对PV 的影响,构造新的开关函数使之适用于含PV 的配电网;其次,分析发生故障的开关所在位置对构造开关函数过程的影响,搭建基于区域定位和区段定位的分层定位模型;然后,利用ACPSO 算法、隐枚举法求解定位模型;最后,仿真测试结果表明,新模型能够消除大量故障信息畸变(或缺失)对故障定位准确度的影响,说明新算法具有较好的容错性。
1 配电网故障定位分层模型
1.1 含PV 的配电网故障电流编码
随着分布式发电技术的不断发展,大量的PV接入配电网中,导致馈线之间的上下游关系受到PV 接入的影响[12]。PV 不同于一般的分布式电源,在并入配电网的过程中需要运用变流器才能实现,因此属于变流器类的分布式电源,其提供的短路电流一般为额定电流的1.2~1.5 倍左右[13]。假设供电路径长度等因素对PV 输出的故障电流无影响,那么理论上能够设定一个电流阀值来区分正常的工作电流与短路电流。因此,需要改进传统故障电流编码来消除PV 接入后对配电网的影响。
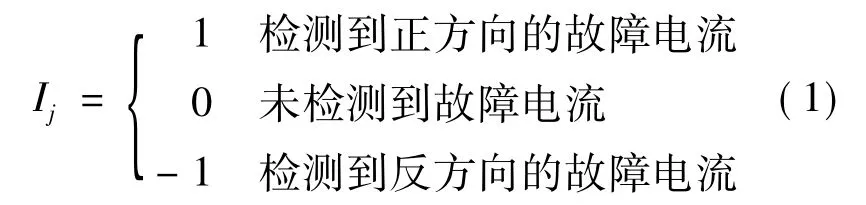
改进的故障电流编码由“0”、“1”和“-1”这3种参数构成。为了消除不同位置PV 接入所带来的影响,将系统电源流向负载处的故障电流方向定义为正方向。开关的状态值表示为:
以图1 所示配电网为例,当区段(4)处发生故障时,流过节点4 的故障电流方向与正方向相同,为由系统电源G 流向负载,因此节点4 的故障电流编码为“1”;而节点7 处的故障电流由PV 流向负载,与正方向相反,则节点7 的电流编码为“-1”。
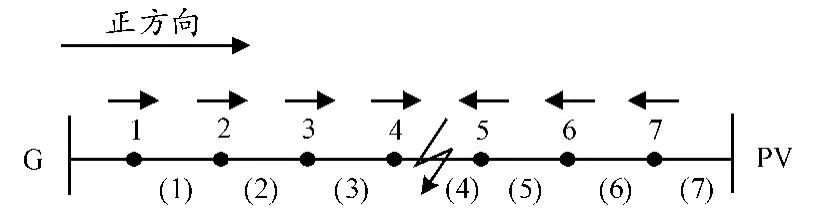
图1 含PV 配电网络图简化示意图
1.2 含PV 配电网单层模型开关函数
当含PV 的配电网发生故障时,PV 很容易被其自身所处的环境影响。当光照强度达到一定值(如额定值的20%以上)时,PV 提供的短路电流值很大,与额定光照时基本一致,能够达到FTU 设定的上报阈值;当光照强度很小时,PV 提供的短路电流会显著减小,可能无法达到上报阀值,故障电流会被屏蔽[14]。
由于需要同时考虑不同位置PV 的并网和不同光照强度的影响,本文中改进文献[15]的配电网单层模型的开关函数,增加光照强度对故障电流的屏蔽系数,如式(2)—(4)所示。
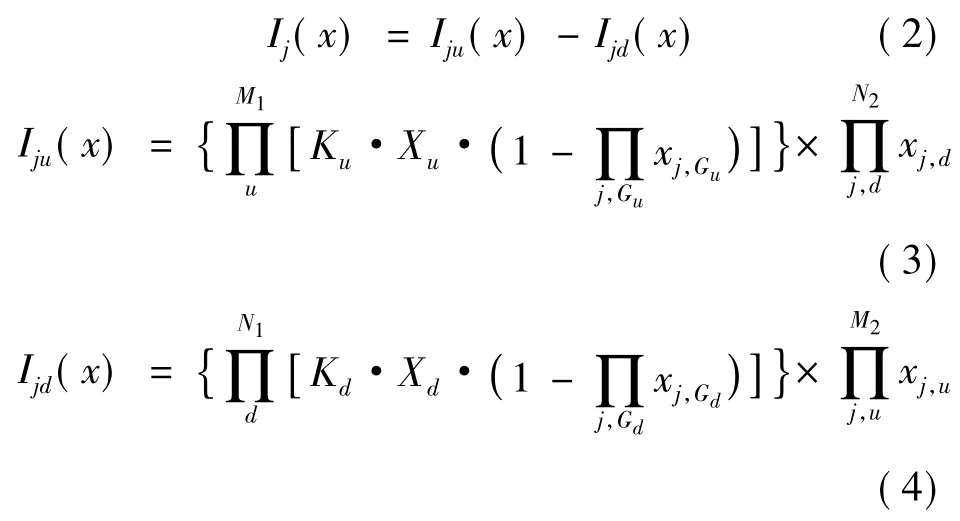
式中:xj,Gu和xj,Gd分别表示开关j 到上游电源Gu及下游电源Gd之间的馈线区段的状态值;xj,u和xj,d表示上游和下游部分所有馈线区段的状态值;M1、N1分别为上游部分与下游部分电源的数量;M2、N2分别表示上游部分与下游部分所有馈线区段的总数;Ku和Kd表示光伏电源的并网系数,当PV并网时取值“1”,无PV 接入时,取值为“0”;Xu和Xd分别表示上下游部分PV 的屏蔽系数,当光照足够时,PV 输出的短路故障电流很大,超过上报阀值,取值为“1”;当光照不足时,PV 提供的短路电流很小,未达到上报阀值,短路电流被屏蔽,取值为“0”;对于系统电源G 的屏蔽系数为“1”。
1.3 基于对外等效定则的网络简化分析
含PV 的配电网由于包含大量节点,当运用单层定位模型求解时,耗时较大,实时性无法保证,且经济性较低。同时,单层模型的准确性及容错性也较差。
以图2 所示的T 型含PV 配电网为例,在光照足够时,分析开关函数的逻辑规律。
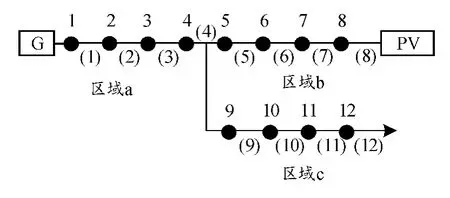
图2 T 型配电网示意图
1)当区域c 的区段(9)发生故障时,由式(2)—(4)可得区域a 上各个节点的开关函数值为:
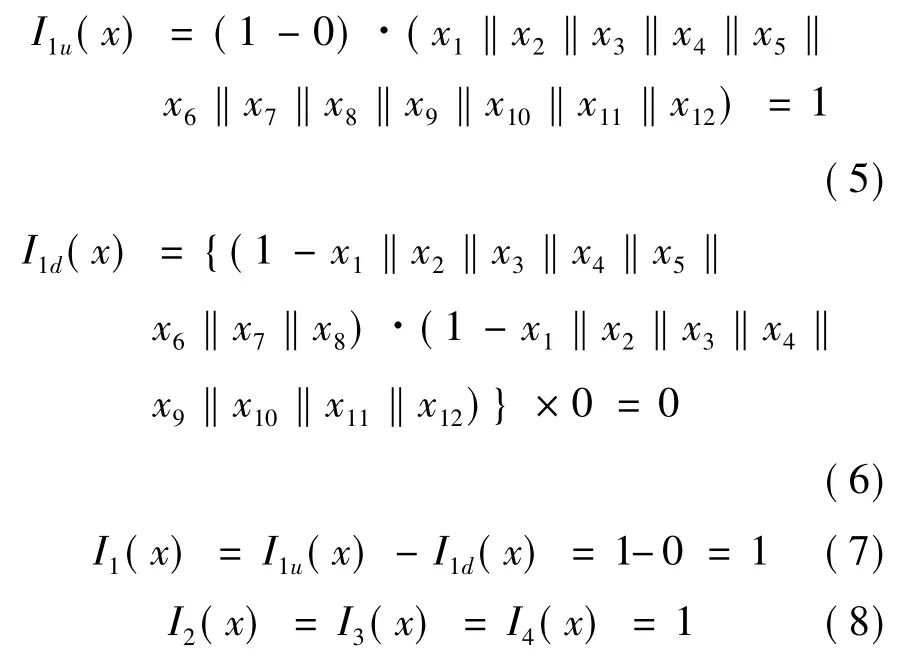
式中,“‖”表示逻辑或运算。
同理,可得区域b 各个节点的开关函数值为:

2)当区域c 的区段(11)发生故障时,由式(2)—(4)可得区域a 上各个节点的开关函数值为:

区域b 中各个节点的开关函数值为:

3)当区域c 的区段(10)和(12)发生故障时,由式(2)—(4)可得区域a 上各个节点的开关函数值为:

区域b 中各个节点的开关函数值为:

根据以上结果分析可知:区域c 中发生故障的区段数量对其他区域的开关函数的构建无影响。根据二端口的对外等效原则[15],将图2 所示的T 型配电网各区域等效为二端口,搭建故障定位分层模型,如图3 所示。
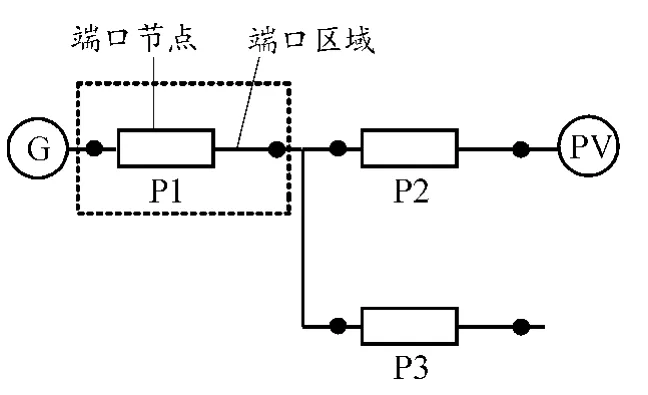
图3 T 型配电网分层故障定位模型示意图
图3 中,将二端口内部定义为端口节点,其与靠近PV 的端子之间的区段定义为端口区域。包含12 个节点的T 型配电网被简化成只有3 个二端口的网络,模型的维度降低了75%。等效电源(主电源G 及光伏电源PV)和3 个等效二端口构成分层模型的第一层,3 个等效二端口的内部构成了第二层。
2 含PV 配电网故障定位算法
2.1 故障区域定位算法
2.1.1 混沌映射
混沌系统中Logistic 的映射原理为[16]:

式中:zi+1为第i +1 次时的混沌序列,zi为区间都市(0,1)的随机数,zi≠0.25、0.5 和0.75;μ 是取值范围为[3.57,4]的控制参数。
混沌变量xi映射到混沌序列zi的表达式为:

利用载波函数生成混沌变量xi:

利用Logistic 混沌映射,对粒子群初始速度与位置进行优化,保证种群的遍历性与多样性。同时,对种群的最优粒子进行混沌搜索和更新,以保证在提升收敛速度的同时避免陷入局部极值。
2.1.2 自适应粒子群算法的原理
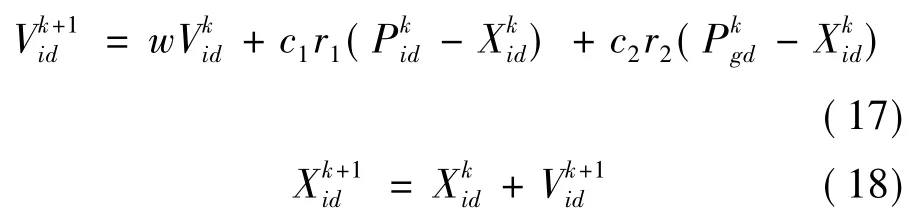
粒子群优化算法(particle swarm optimization,PSO)是近年来发展较好的智能算法之一[17]。粒子群算法通过不断更新速度和位置来寻找全局最优值[18]。其速度和位置更新表达式如下:
为了评判每次寻优结果的优劣,引入评判系统—进化系数δ[19]。其表达式为:

式中:favg(i)表示粒子群迭代到第i 代时的平均适应度值;fmax为当前种群的最大适应度值。
算法基本原理:在算法的迭代过程中,若迭代后种群最优值与上一次迭代相同,则利用式(19)计算;若种群最优值与上一次迭代不同,则取δ=1。在对δ 进行计算后,若δ>1,则表示经过迭代,算法的寻优效果更差了,需要进行更多的全局搜索;若δ<1,则说明此次寻优取得了更好的效果,需要进行更多的局部搜寻。
利用进化系数δ 来对惯性权重w 以及加速因子c1、c2进行动态自适应调整。具体表达式为:
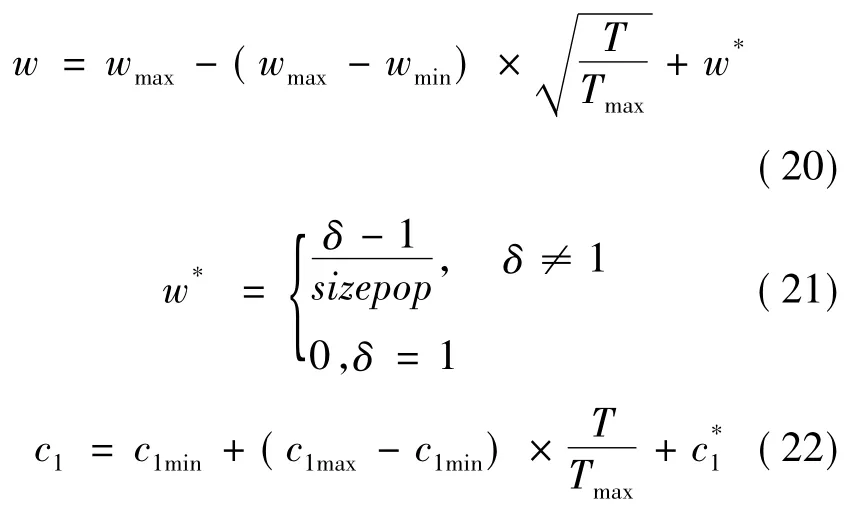
式中:wmax和wmin为惯性权重w 的最值;sizepop 为粒子群种群数;c1max及c1min为加速因子c1的最值;c2max及c2min为加速因子c2的最值。
2.2 故障区段定位算法
对配电网进行分区处理后,每个区域包含的节点数量大大降低,因此只需要利用其他算法来求解分层模型。隐枚举法常被用来求解维数较小的数学模型[20]。隐枚举法能够在对变量取值为0和1 时进行核算,减少一部分没有必要进行枚举的情况,再对目标函数值进行比较来求最优解[21]。隐枚举法在进行全局寻优时,求解速度较快,适用于本文的分层故障定位模型。
3 故障定位流程
3.1 支路的划分与等效
定义一个关系矩阵,以更好地描述整个网络中开关节点与区段之间的关系。首先对矩阵的行向量进行搜索,并记录其中非零元素的数量,将其定义为邻接度向量。在邻接度向量中,边界节点表示邻接度为1 的节点,邻接度超过2 的节点定义为分叉节点,一条支路由2 个相邻的边界节点或者分叉节点相互连接构成[22]。利用构建的支路和分叉节点进行二端口等效,以此搭建分层故障定位模型。
3.2 配电网故障区域定位
首先进行故障区域定位,SCADA 首先对区域的节点状态信息进行采集,再利用式(2)—(4)所示的配电网区域定位的开关函数和式(26)所示的区域定位的适应度函数,然后运用ACPSO 算法将故障定位到故障区域。
适应度函数对故障定位精度有较大影响[23-24]。为了避免故障信息畸变带来的不利影响,本文在文献[10]的适应度函数基础上进行改进。改进后的函数为:
3.3 配电网故障区段定位
将故障定位至故障区域后,利用隐枚举法进行故障区段定位。在等效二端口内部,系统对区段节点的电流信息进行采集,同时搭建区段的开关函数。包含2 个电源的配电网的开关函数为:
对于只包含1 个电源的配电网,其开关函数表达式为:

同时,构建区段定位的适应度函数:
式中:N 表示每个等效二端口所包含的节点数;Ir表示二端口内部节点r 处的故障电流信息;Ir(x)表示二端口内部区段节点r 的开关函数;X(r)表示等效二端口内部区段的状态编码。
3.4 分层故障定位流程
数据采集与监视控制系统(SCADA)首先采集区域节点信息和电源开关信息,利用ACPSO 算法将故障点定位到具体区域,再采集故障端口内部的区段节点信息,利用隐枚举法将故障定位到具体区段[24]。分层故障定位流程如图4 所示。
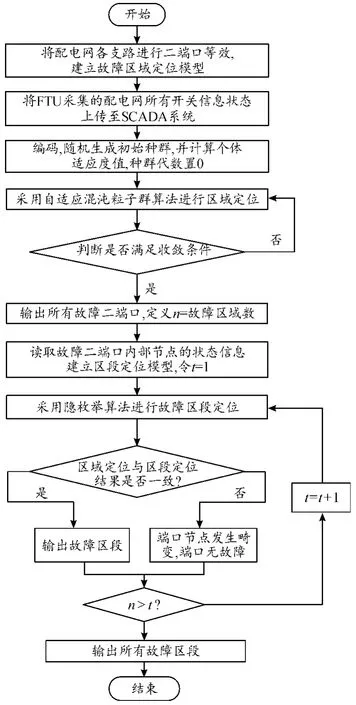
图4 分层故障定位流程框图
4 算例仿真
以图5 所示的33 节点的分布式光伏配电网为例。其中,G 为系统电源,PV1、PV2、PV3 为3 个分布式光伏电源,K1、K2、K3 为分布式电源的接入开关,当分布式光伏接入时,取值为“1”,否则取“0”;1—33 为开关节点,(1)—(33)为馈线区段。
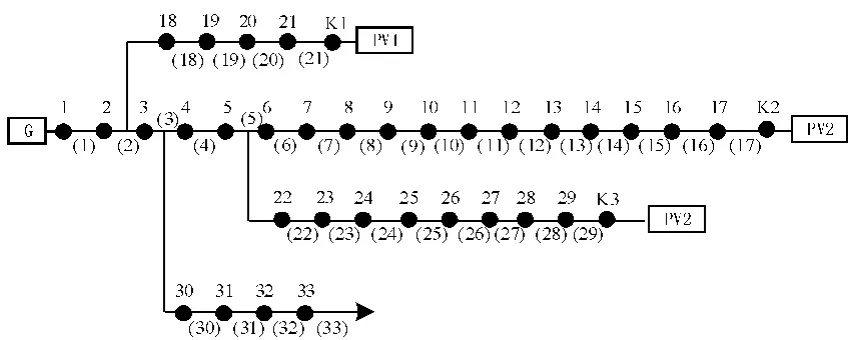
图5 33 节点含分布式光伏配电网示意图
根据二段口等效原则将图5 所示的含PV 配电网进行二端口等效,如图6 所示。
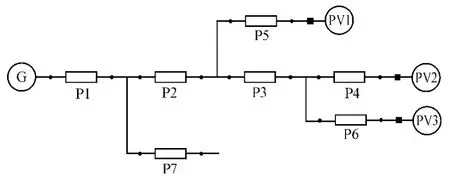
图6 第一层故障定位模型示意图
各个二端口所包含的区段和节点信息如表1所示。
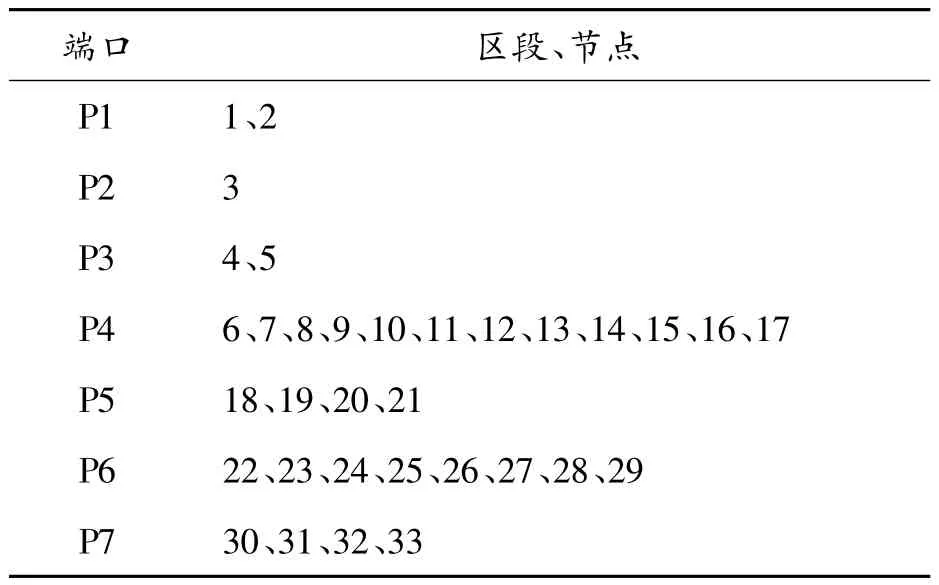
表1 二端口所包含的区段和节点信息
4.1 算例仿真分析
仿真ACPSO 的参数设置:种群数m=50,算法最大迭代次数n=100,种群维数D=33,wmax=0.9,wmin=0.4,c1max=1.3,c1min=1.1,c2max=2.0,c2min=1.2。
2011—2013年,天眼应用服务子系统进一步升级改造,在WebGIS平台上实现了水文气象产品应用服务,应用系统在以下6个方面有了较大的改进,显著提升了系统的应用技术水平和效果。
4.1.1 单重故障与多重故障仿真
假定二端口P3 的区段(5)发生短路故障,3个光伏电源均并网,光照充足。FTU 上传的故障电流信息为[1 1 1 1 1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1 0 0 0 0]。利用表1 得出对应端口区域的故障电流状态信息为[1 1 1-1-1-1 0]。采用ACPSO 算法进行故障区域定位,输出故障区域的状态值为[0 0 1 0 0 0 0],判定端口P3 发生故障。
读取端口P3 内部所含区段的故障电流信息为[1 1],再利用隐枚举法定位故障区段,输出故障区段状态值为[0 1],判定区段(5)发生故障。
考虑不同区段同时发生短路故障,同时计及不同位置光伏的并网和FTU 上传的故障信息发生畸变的情况,进行仿真测试,结果如表2 和表3所示。
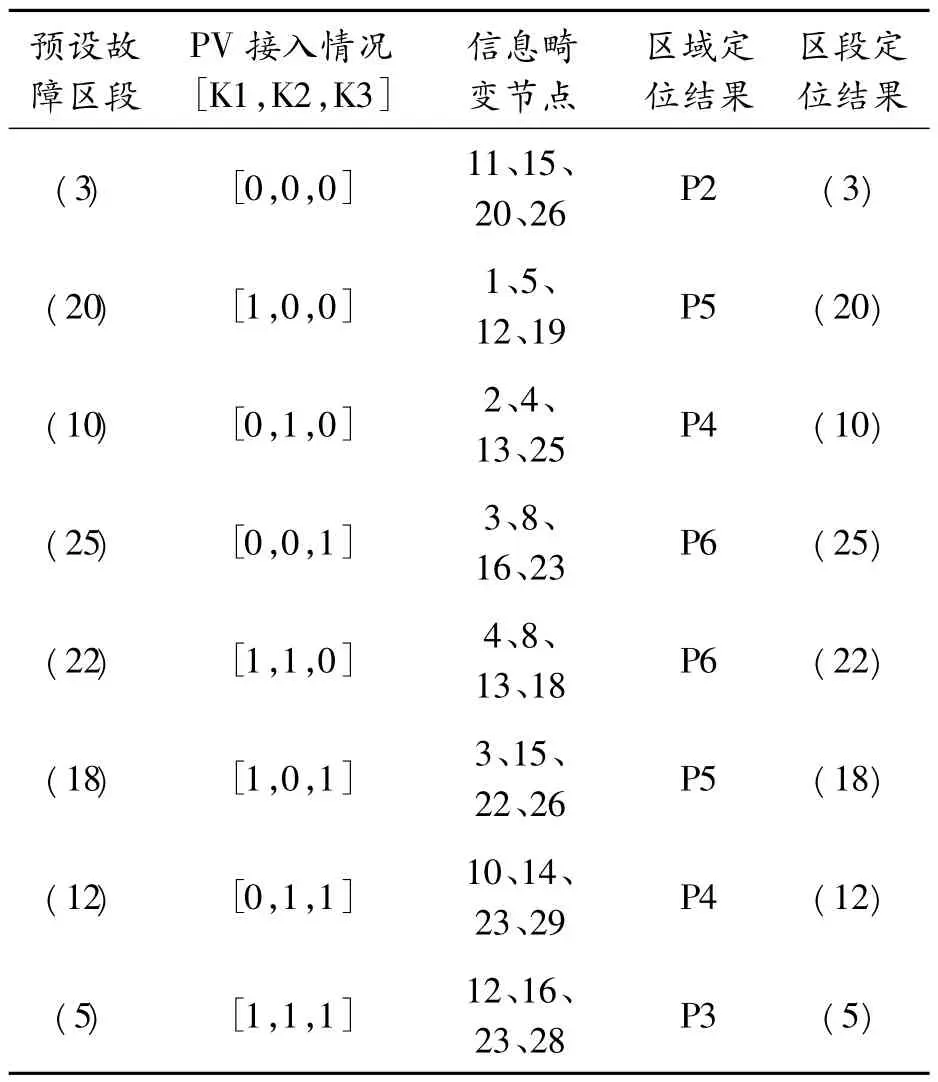
表2 单重故障故障定位结果
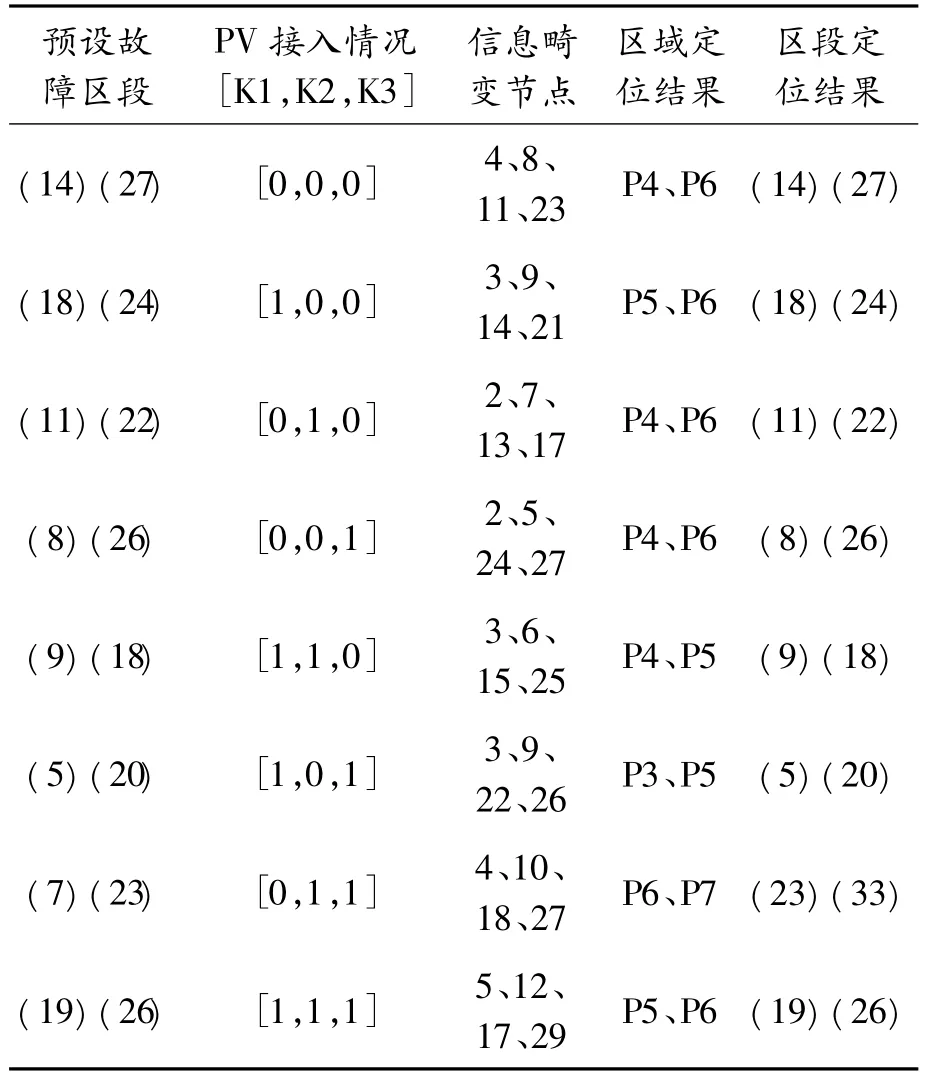
表3 多重故障定位结果
由表2 和表3 可知,新方法几乎不受PV 及发生故障区段数量增加的影响,同时在部分FTU 上传的故障过电流信息缺失和畸变的情况下,算法能够准确定位故障位置。由仿真结果可知,ACPSO算法具有可行性,能动态适应PV 并网,且具有高容错性。
4.1.2 不同光照强度下的情况
在3 个光伏电源全都接入后,考虑PV 因接入处光照不足而导致PV 所发出的故障电流被FTU屏蔽的情形,验证定位方法在不同光照强度下PV接入情形的可行性。仿真得到的不同光照强度下的故障定位结果见表4。
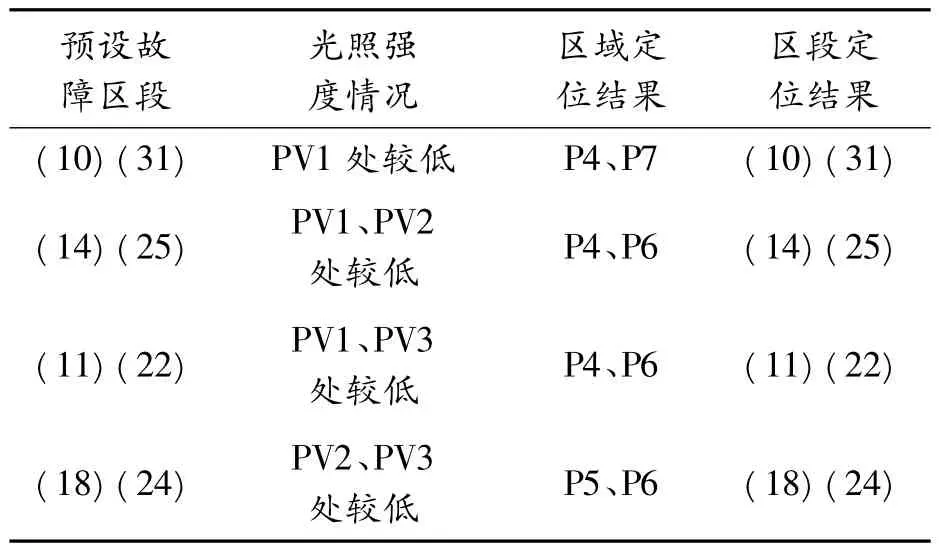
表4 不同光照强度下的故障定位结果
部分PV 在光照不足时可能会被FTU 屏蔽,系统电源G 决定被屏蔽的PV 所在的馈线分支的故障信息。由表4 可知,新方法基本不受不同光照强度的影响,能准确判断故障区段。
4.2 与其他模型及算法对比
BPSO 和IBPSO 参数设置:种群数m=50,最大迭代次数n=100,种群维数D=33,wmax=0.9,wmin=0.4,C1=C2=2.05。
4.2.1 容错性对比
在3 个光伏电源均并网的情况下,分别预设存在不同故障信息畸变的情况,对上述3 种故障定位模型进行求解,对比其容错性。不同定位模型容错性结果如表5 所示。
由表5 的结果可知,2 种单层故障定位模型在故障畸变信息及故障区段较多时不能准确定位故障区段,容错性较低;而本文中所提的新分层故障定位模型变量维度低,受畸变信息影响小,能够在故障区段及畸变信息较多时进行准确定位,具有良好的容错性。
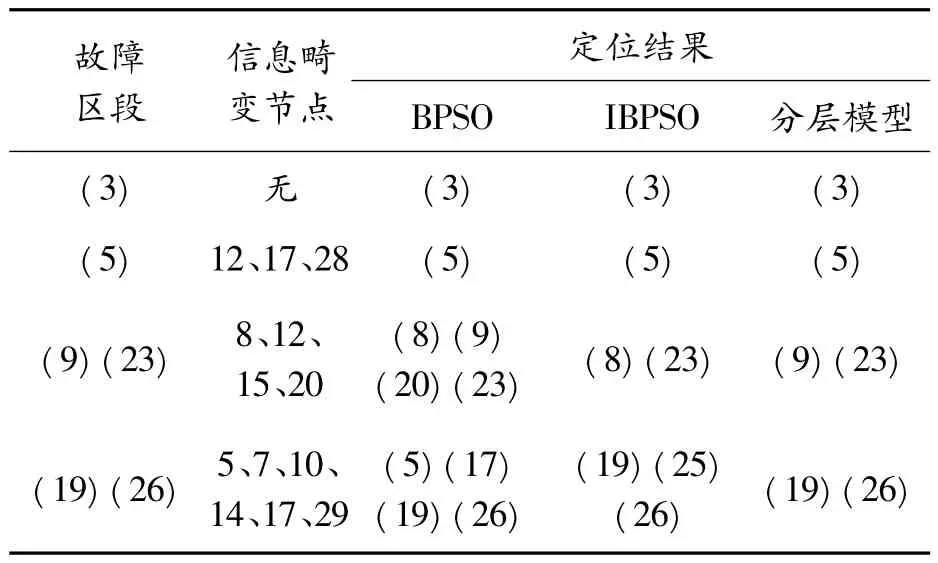
表5 不同定位模型容错性结果
4.2.2 快速性对比
根据表5 设置4 种故障类型,分别以上述3 种定位模型运行50 次,统计平均迭代完成耗时,快速性结果如表6 所示。
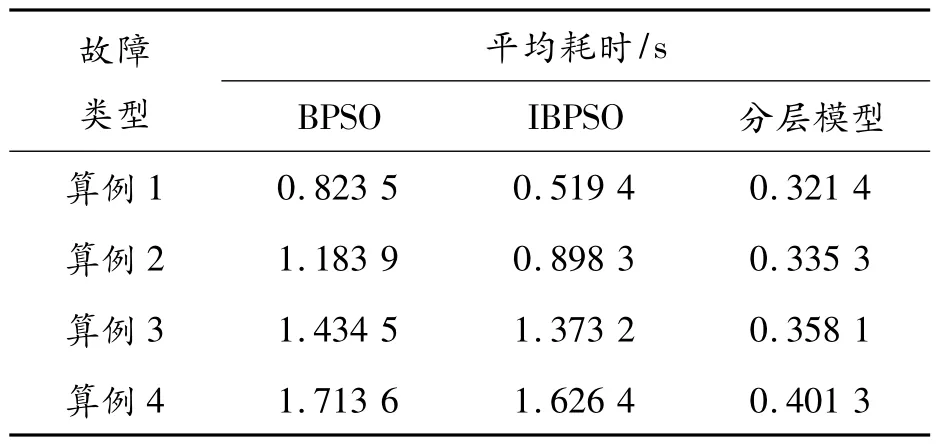
表6 快速性结果
由表6 的结果可知,本文中所构建的故障定位分层模型的消耗时间明显少于2 种单层故障定位模型,证明新方法在快速性方面优势明显。
4.2.3 准确性对比分析
以表6 的4 种情况为例,分别以3 种算法运行50 次对比准确性,仿真结果如表7 所示。
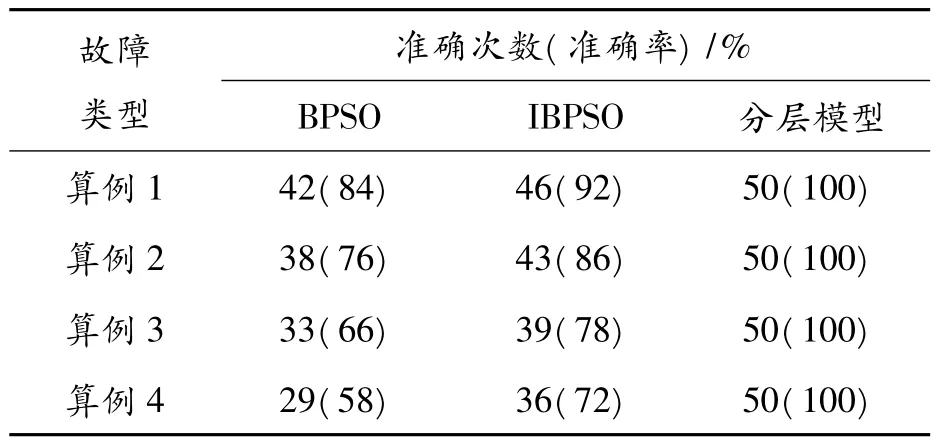
表7 3 种算法的准确率
通过表7 的准确率数据可以看出,分层故障定位模型的准确性最好,不会受到故障区段增加以及FTU 收集到的错误故障信息的影响,准确率保持在100%;而2 种单重故障定位模型维度大,运算量大,准确率较低。
综上所述,本文所构建的分层故障定位模型和ACPSO 算法在故障定位的快速性、准确性、容错性方面均具有较为明显的优越性。
5 结论
提出了一种基于ACPSO 算法和分层模型的方法对PV 并网的配电网进行故障定位。通过二端口等效降低配电网的维度,并分别利用ACPSO算法和隐枚举法对故障区段进行区域定位和区段定位。在含PV 的配电网中进行仿真测试,并与单层定位模型进行对比。结果表明,新方法能够动态适应分布式光伏的并网与退出,且几乎不受外界环境变化的影响,具有更高的准确度和计算效率,同时具有更好的容错能力。
