人机交互还是人际交互?消费者权力感对机器人服务选择的影响机制研究
2022-05-17崔常琪张常清
崔常琪 姚 琦 李 明 张常清
(1.重庆大学 经济与工商管理学院,重庆 400044;2.重庆交通大学 经济与管理学院,重庆 400074;3.西南交通大学 经济管理学院,四川 成都 610031)
0 引言
AI技术赋能为机器人服务行业的发展注入了新活力,使之成为服务营销领域最为引人注目的变化之一。机器人以其卓越的效率和对程序变化的快速适应能力而被广泛应用于餐饮、旅游、医疗等服务行业。例如,美国第二大家居装饰用品零售商Lowe′s在其位于旧金山的11家门店中推出了机器人LoweBot以回答客户的标准问题,并提供店内导航服务;美国供应链机器人公司Aethon研发的Tug机器人则被应用于数百家医院,为病人提供床单换洗与餐具清洁等服务。机器人服务行业的快速崛起同样引发了一个学界和业界共同关注的问题,即服务机器人是否可以完全替代人类员工在服务行业中所扮演的角色呢?
部分学者与商业媒体对此问题做出了肯定与支持的回答。全球最大的财经资讯公司彭博社在其2017年的新闻报道中将机器人服务形容为公司吸引顾客以保持竞争力的“最大秘密武器”。相关学者同样认为,从战略角度出发,机器人服务规模化可以有效降低企业服务成本,并成为营销利器[1-2]。而另一部分学者则提出了相反的观点,他们认为即便服务机器人拥有人类员工无可比拟的优势,但与消费者进行服务接触所产生的商业伦理与法律等问题不可忽视,全面推行机器人服务以取代传统人工服务的策略与时机仍然未趋成熟[3-4];但上述研究均仅站在公司的角度,依据不同服务提供者所引发的差异化结果得出相关结论,缺乏从消费者自身特征的视角探究消费者对不同服务提供者评价与选择的相关文献。同时,不论是人机交互抑或是人际交互,其本质均是社会交互,而影响社会交互最为核心的动力便是个体的权力感[5-6],大量研究表明在营销与服务场景中权力感无处不在,并对消费者在社会交互过程中的情绪、认知与行为三个方面均会产生重要影响[7]。因此,以消费者权力状态作为市场细分的依据,从消费者的心理出发洞悉机器人服务与人工服务的相对偏好,无疑有利于企业营销绩效的提升。
本研究旨在依据权力的趋近-抑制理论[8]构建完整的概念框架,并设计四个研究探究消费者权力感对机器人服务选择影响的内在解释机制及其边界条件,研究结果在丰富相关理论的同时,对企业依据不同消费者制定个性化服务营销策略、科学设计消费者服务体验等方面具有重要实践意义。
1 文献综述与研究假设
1.1 机器人服务
ISO8373(国际标准化组织)在2012年将机器人定义为:位置可以固定或移动,能够实现自动控制、可重复编程、多功能多用处、末端操作器的位置要在3个或3个以上自由度内可编程的工业自动化设备。随着相关研究的不断深入,机器人的定义与范围也不断被学者们放宽,Paul等[9]将机器人宽泛地定义为有形的智能机器设施或无形的计算机程序,这些程序“执行基于规则的工作,并且倾向于可配置基本特性,如认证、安全、审计、日志记录和异常处理”。这个定义从ISO8373的定义中去掉了对机械部件的要求,强调了对智能的要求。因此,本文将采用Paul等[9]对机器人的广义定义。机器人服务则是指服务传递的渠道为机器人[10]。随着机器人在服务领域的应用范围不断扩大,企业需要紧急的、可操作的指导,以确定如何、何时以及在多大程度上采用和整合机器人技术,以获得可持续的竞争优势[11],而现有文献并未清晰的回答这一问题,反而表现出两种截然不同的观点:
一部分学者认为应在服务场景中全面整合机器人技术以取代人工服务,他们的理由是随着大数据分析和人工智能等技术的发展,机器人已经比人类更具有能动性(Agency,自主计划、行动和自我控制的能力)[12],在诸多复杂任务上的表现已经超越人类。Fethi和Pasiouras[1]的研究结果表明,得益于类人的举止、情绪和远超人类的工作时长,服务机器人可以提升企业的运营效率和管理效率。同时,拥有超强的大数据处理与分析能力使得机器人可以比人类员工更好地了解客户,并利用超高的预测精确度,在服务交付过程中提高客户忠诚度和对公司的承诺[11]。例如,零售店内服务机器人已经可以利用每位顾客过往消费记录精准预测消费者每次采购商品的日期及所要采购的商品,当消费者在店内采购时主动将顾客引领至该商品摆放处;而另一部分学者则对此持反对态度,他们认为相较于人类员工,服务机器人使得顾客感知到更高的风险。恐怖谷效应表明[13],随着服务机器人逐渐拥有与人类相似的情绪和智力,个体感知服务机器人对自我身份的威胁感会逐渐增强[14]。相较于人类员工,与服务机器人进行交互会减少消费者的信任感知,并引发对数据安全与隐私问题的担忧[15]。此外,Zamora[3]通过对定性数据进行分析后发现,当被试面对人工客服(相对于智能聊天机器人)时,其对敏感信息的披露意愿更高。因此对于消费者而言,服务机器人仍然存在较大的风险性,企业的顾客服务体验设计与服务价值共创仍应围绕人工服务展开。
通过对领域内文献的梳理,我们发现过往研究对以下两点问题的探讨不够充分。首先,服务机器人与传统的自助服务科技(Self-service technology)有很大的不同,前者与客户进行服务接触是一种社会交互[16],而现有文献更多的是从公司的角度探究不同服务提供者(服务机器人相比员工)所导致的不同结果变量(如隐私关注、运营效率),却并未从社会交互与消费者个体差异的视角出发,有关消费者对不同服务提供者评价与接受的前置变量及其解释机制并未得到充分的挖掘与探讨。其次,市场营销人员可以利用一些实际的、可行的干预手段来降低消费者对服务机器人的风险感知,提高消费者对机器人服务的选择意愿与评价,但这方面的探索和验证很少。因此,本研究将从消费者视角出发,检验不同权力感消费者对机器人服务的态度与评价,并探索可以增强消费者对机器人服务选择的因素,以协调解决上述文献中的分歧。
1.2 消费者权力感对机器人服务选择的影响
权力是社会交互最为核心的动力,往往被定义为社会关系中影响他人的能力以及对有价值资源的非对称控制[6],而权力感是个体对自身影响他人与环境的能力的主观感知[6]。权力感本质上是一个社会关系概念:它反映了个体在社会交互中对其他个体态度、行为和结果的影响[6,17]。权力感有两类重要来源,第一类是个体对自己长期所处权力状态的知觉。它是个体根据自己在较长时期内所扮演的社会角色而做出的判断,相对稳定且作用力持久。例如,相对于公司基层职员,公司管理者往往会长期保持更高的权力感[18-19];第二类是个体在某些具体情境下产生的有关自身权力状态的即时心理感受,这随着情境变化而变化。例如,一个公司的中层管理者在审批下属工作计划时会唤起他们拥有权力的感知,但当他回想起对自己孩子调皮行径束手无策时又会产生缺乏权力的感觉。每个人在一天中都可能经历高权力感和低权力感的时刻,因此,不存在永远的高权力感个体和低权力感个体[8,20-22]。
Anderson和Berdahl[23]就这两种权力状态如何影响个体的动机、情绪和行为进行了专门的探讨。该研究发现长久权力状态和临时权力状态都是权力感知的来源,两者均通过个体主观的权力感知产生影响,并遵循同样的影响机制。因此,在实证研究过程中,我们既可以使用权力感量表测量个体的长期权力状态[6,24],也可以使用情景回忆、词语矩阵等方式激发个体产生临时的高权力感或低权力感[21-22];学者们有关权力感来源的重要发现同样为企业的营销实践和管理活动提供了可操作指南。对于营销人员而言,既可以通过数据库技术,依据一般社会信息识别不同权力感的消费者,并依此作为市场细分的依据,实施不同的营销策略,从而提高营销绩效[25];也可以依据企业自身的产品或服务,在营销沟通过程中使用环境线索(如气味、音乐)临时激活消费者不同的权力感状态以提升消费者对产品或服务的选择与评价[26-27]。
由于权力感在服务与营销场景中无处不在,因此在过去的十年里,学者们开展大量的研究检验了权力感对补偿性消费[21]、金钱储蓄[28]及冲动购买[29]等消费者行为的影响。但研究人员尚未注意到消费者对机器人服务的选择是由个体的权力感所决定的,这是因为面对风险属性较高的目标(例如员工、产品)时,消费者对自身影响与控制风险结果能力的评估不同会直接导致其做出不同的选择与行动[7]。
权力的趋近-抑制理论[8]可以有效的解释消费者权力感与机器人服务选择的潜在关系。这一理论详细的解释、阐述了在社会交互过程中拥有或缺乏权力的心理感知是如何影响个体的情感、认知和行为。其核心观点是,相较于低权力感,高权力感在社会交互与选择判断时更可能激活个体的“行为趋近系统”(如关注积极和有益的信息、有较强的信心、表露出积极的情绪与去抑制化行为)[8,30],而相较于高权力感,低权力感在社会交互与选择判断时更可能激活个体的“行为抑制系统”(如关注风险和威胁类信息、信心较低、表露出消极的情绪与抑制化行为)[8,30]。根据这一理论框架,我们认为,当服务提供者为具有较高风险的服务机器人时,高权力感消费者的选择意愿与服务评价会高于低权力感消费者。
依据权力的趋近-抑制理论[8],我们认为权力感对消费者机器人服务选择的影响可以通过以下两点解释:首先,相较于低权力感个体,行为趋近系统的激活使得高权力感个体更追求收获与奖赏,更关注积极和有益的信息而非目标物所包含的风险元素[31-32],Boksem等[33]开展的一项脑电波研究表明,相较于低权力感被试,处于高权力感状态的被试其左前额叶皮层的活动频率会明显增加,而这一脑部区域往往与关注收益型信息紧密相关。当面对风险属性较高(相较于人工服务)的机器人服务时,高权力感的消费者会减少对负面信息的处理与关注[23],而是更关注机器人服务所带来的精准预测、高效便捷等潜在收益,对机器人服务的选择意愿较高。与高权力感消费者相反的是,低权力感激活个体的行为抑制系统,增加个体对损失的规避和敏感性,导致个体更倾向于警惕环境中的威胁,对威胁性信息的关注程度远高于目标物所能带来的潜在收益[31-32],更依赖目标物所包含的风险元素做出决策,对与服务机器人相关的负面信息更为敏感,选择意愿与评价较低,对相对低风险的、稳健的人工服务选择与评价更高。其次,通过行为趋近系统,高权力感状态会导致消费者在认知上变得过度自信[34],更为乐观[35],并产生一种幻觉控制[36],会高估自己在交互过程中控制服务机器人的能力以及抵御服务机器人可能产生的风险性后果的能力,从而更愿意选择由服务机器人为其提供服务,对机器人服务评价更高,而行为抑制系统的激活则使得低权力感消费者做出与其相反的选择与评价。基于上述分析,本文提出以下研究假设:
H1消费者权力感正向影响其对机器人服务的选择。
H1a相较于低(高)权力感消费者,高(低)权力感消费者更愿意选择机器人(人工)服务。
H1b相较于低(高)权力感消费者,高(低)权力感消费面对服务机器人(人类员工)时感知服务环境质量与支付意愿更高。
1.3 自我效能感的中介作用
自我效能这一概念最早由Bandura[37]在1977年提出,用以描述在特定情境与社会交互过程中,个体对自身能力的估计或信念。自我效能感先于行为产生,代表的是个体对自身能力的主观判断与处理风险的信心,而非个体客观的能力、技能及知识;个体处于高自我效能状态时更有可能为自己设定具有挑战性的目标,更关注奖赏类信息并愿意进行攀岩等高风险运动以获得奖赏[38]。
自我效能感是人类活动的导向因素之一:它直接或间接地影响人类的思维模式、行为。在消费者对科技选择与评价的情境下,自我效能感由于作为重要的影响因素而被学者们广泛探索。研究结果表明,自我效能感会正向影响消费者对软件及健康设备的使用与评价[39];面对精准的网络个性化广告时,高自我效能感可以降低消费者风险感知与隐私关注,从而增强其点击意愿[40]。
由于自我效能感可以对消费者科技采纳与选择意愿产生影响,我们认为自我效能感同样会影响消费者对机器人服务的选择。具体来说,当个体自我效能感较高时,个体会增强自己通过智能化水平较高的服务机器人完成任务的信心,高估自己的知识储备与风险承担能力,更愿意与机器人进行交互;而个体自我效能感较低时,面对具有风险属性的服务机器人时会产生较强的失控感,更愿意选择风险程度较低的人工服务。
依据权力的趋近-抑制理论[8],我们认为权力感正向影响个体的自我效能感。具体来说,当个体认为自己能力强、成功且有价值时,他们的自我效能感便会增强[41]。研究表明,处于高权力状态的个体往往认为自己的能力优于他人,并对自己可以完成任务抱有信心[42],特别地,高权力导致个体对自己的决策与知识产生过度自信、更高的控制感知和更低的环境约束感知[37]。这种积极的自我评价和自我预期增强了高权力感个体在特定情境下处理风险和困难的信心与决心[41]。因此,我们认为高权力感个体有较高的自我效能感,更愿意选择带有一定风险的机器人服务,而低权力感个体由于其在服务场景中自我效能感较低,更愿意选择人工服务。因此,本研究提出假设:
H2自我效能感(高/低)中介了消费者权力感对机器人服务选择的影响。
1.4 服务机器人机械化的调节作用
基于前文表述,相较于高权力感消费者,低权力感消费者对机器人服务的选择意愿与服务评价较低,更愿意选择人工服务。尽管当下人工服务仍有其重要的价值与意义,但伴随着科技水平不断的提升与进步,机器人服务规模化将成为未来世界发展的一大趋势。因此,如何对机器人服务本身进行科学的优化设计以有效提升低权力感消费者对机器人服务的选择意愿是本文所关注的另一重要问题。权力的趋近-抑制理论[8]表明,低权力感消费者在社会交互的过程中对目标物风险信息的敏感程度远高于高权力感消费者[30],因此,探究企业能够有效降低低权力感消费者对机器人服务风险感知的可操作方式兼具理论与实践价值。
结合权力的趋近-抑制理论[8]与服务机器人的相关研究,我们认为将服务机器人机械化可以有效提升低权力感消费者对机器人服务的选择意愿。牛津词典对机械化的定义为:制造机器的动作或过程,是拟人化的反义词。制约低权力感消费者对机器人服务选择的重要原因是服务机器人拥有远超人类智力的同时还拥有类人的外貌、情绪与举止,这使得低权力感消费者担心服务机器人会自发的、有意识的利用其超强的数据处理能力做出损害其自身利益的事情,这一担忧也被学者们称为“恐怖谷效应”[13]。
随着拟人化的积极效应被学者们广泛探讨与验证,商家在机器人服务领域也开始实行拟人化策略,例如美国著名的汉森机器人制造公司将自己生产的机器人以David Hanson而非机器模型编号进行命名,并将其描述为一个有生命的且智力逐步提升的人类。然而权力的趋近-抑制理论[8]与恐怖谷效应共同表明[13],对于低权力感消费者而言,拟人化在服务机器人领域的应用可能并不会产生积极效应,反而会带来一系列的负面效应。Kim等[43]的研究结果表明,相较于拟人化程度高的智能赌博机,低权力感个体在面对无生命特征、拟人化程度低的智能赌博机时下注意愿更强、感知赌博游戏的风险性更低。因此,我们建议面对低权力感消费者时,商家可以对服务机器人进行机械化处理以增强其选择意愿。领域内学者探究了两种将服务机器人机械化的方式可以有效减弱恐怖谷效应。第一种方式是使用工艺手段改变机器人类人的外观,Kurt等[44]的研究结果表明,与一个拥有人类外貌的机器人相比,面对一个由面部充斥各类电子元件的机器人(机械化处理后)时,被试的恐惧感更低;第二种方式则是采用语言将服务机器人描述成一个没有生命的物体,例如Martin等[14]在一组实验中发现,给予服务机器人一个机器编号而不是人类的名字同样可以降低被试的不舒适感。在商业实践中,采用第一种处理方式无疑有损服务机器人的美观程度并会耗费较大的成本。结合实际情况,在营销沟通过程中,采用第二种机械化方式无疑更具有可操作性。
通过对过往研究结论的探索与延伸,我们认为机械化可以调节高、低权力感消费者对机器人服务选择偏好的差异,这一推论仍然遵循权力的趋近-抑制理论。由于高权力感消费者更关注收益性信息,对目标物的风险性信息不敏感[30],无论服务机器人是否被机械化处理,他们依然会只关注服务机器人高于人类的智力与效率等优点,并不会影响他们对机器人服务的选择。而与之相反的是,低权力感消费者对目标物所包含的风险信息较为敏感[30],将服务机器人进行机械化处理后,低权力感的消费者将感知到为其服务的机器人自动自发利用远超人类的智力水平做出有损其利益的潜在风险与威胁已被消除,其对机器人服务的选择意愿与服务评价会提高。因此,本研究提出假设:
H3机械化调节了高、低权力感消费者对机器人服务选择偏好的差异,具体来说,当服务机器人被机械化时,高权力感消费者与低权力感消费者在机器人服务选择上的差异会减弱。
图1为本文的概念框架。本文通过4个研究,采用不同的方式和情境验证上述假设。研究1与研究2使用实验法,分别在医疗与宾馆服务的场景下通过操控权力感的方式,设计不同的因变量(服务类型的选择、感知宾馆服务环境质量以及对服务的支付意愿)检验权力感对消费者机器人服务选择的主效应(假设H1);研究3采用调查研究法,在餐厅的场景下通过测量被试长期权力感的方式进一步验证了主效应(假设H1),并检验了自我效能感的中介作用(假设H2);研究4则将研究2中的服务机器人进行机械化处理,以检验服务机器人机械化的调节作用(假设H3)。
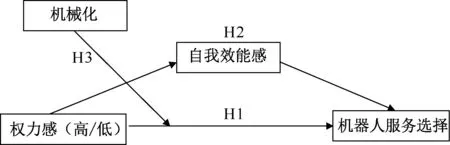
图1 概念框架Figure 1 Conceptual framework
2 研究设计与数据分析
2.1 研究1
研究1采用心理学中的实验启动法操控被试的临时权力感,目的在于探究在医疗服务场景下,消费者权力感对机器人服务选择的主效应。同时,我们设置控制组以探索高权力感者与低权力感者在机器人服务/人工服务选择上的差别来源,为该影响关系背后的心理机制提供初步的证据。
2.1.1 实验流程
研究1采用单因素3水平(高权力感相比控制组相比低权力感)的实验设计,195位在校大学生(92名女性)参与本次实验,实验结束后每人将获得一份校园文化纪念品。
首先,被试被随机分配到高权力感组(66名)、控制组(64名)和低权力感组(65名),我们采用Chen等[45]的词语搜索任务来操控被试的权力感。被试首先看到一个12×12的汉字矩阵,该矩阵包含了18个由两个字组成的词语(如时钟)。被试需要从中圈出这18个词汇。在高、低权力感两个实验组中,待圈出的词语包括13个与高权力(高权力感组,例如控制、影响等)或低权力(低权力感组,例如服从、依赖等)相关的词语;在控制组,被试需要圈出的词语全部为中性词汇。待任务完成后,我们采用7级量表测量被试的权力感知(此时你觉得自己在多大程度上很有权力?1=非常低,7=非常高)和情绪状态(你现在的感受是:1=非常不开心,7=非常开心)[25]。
在操控完被试的权力感后,我们参照Chiara等[46]的研究设计了一个医疗服务的场景。具体来说,我们告知被试我们的课题组将在稍后为他们免费提供一项压力管理建议的服务以感谢他们认真完成本次实验。为了确保被试压力管理的知识水平相一致,我们首先让被试阅读了由美国压力研究所印发的传单,该传单包括压力的定义、压力管理的重要性等知识。被试阅读完传单后,我们告知被试只需要稍后填写一份压力测量的问卷,课题组的心理医生就可以帮助他们分析问卷数据并出具检测报告,报告将通过电子邮件的形式发放。课题组目前有两位医生:A和B,不同的是,A医生是一位人类医生,而B医生则是一位智能医疗机器人。A医生主要是基于以往病例的诊断经验来评估被试的压力水平并提出建议;而B医生则基于大规模病例数据所得出的诊断算法来评估被试的压力水平并提出建议。在过去,两位医生能正确地识别出被检测者的压力水平并提出恰当建议的概率均为82%-85%。然后我们让被试选择由“人类医生A”还是“智能医疗机器人B”为他分析问卷数据出具检测报告。最后收集了他们的人口统计学信息,致谢,并结束本次实验。
2.1.2 结果分析
操控检验:方差分析结果如表1所示,高权力感组被试的权力感均值为5.92;控制组被试的权力感均值为3.56;低权力感组被试的权力感均值为2.24,三者具有显著差异,说明权力感操控成功。其次,通过独立样本t检验发现,不同权力感水平被试的情绪得分不存在显著差异,t(195)=-0.584,p>0.100,即权力感的操控并不会影响人们的情绪,这与以往的研究结果相一致[25],因此,被试情绪的测量数据不纳入接下来的统计分析。
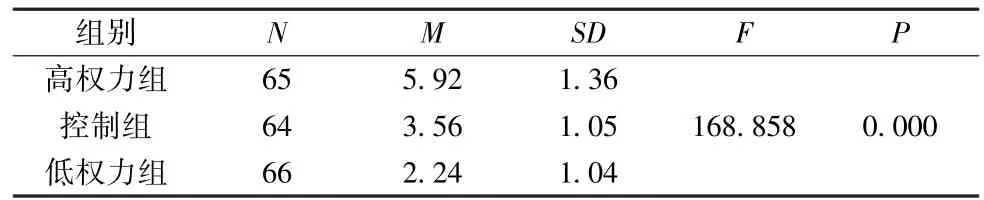
表1 权力感操控检验Table 1 M anipulation check of sense of power
假设检验:图2为不同权力感被试对机器人服务和人工服务的选择人数比例比较。我们将被试选择人类医生A编码为0,选择智能医疗服务机器人B编码为1。卡方检验结果表明,三组被试的选择存在显著差异,χ2(2)=30.358,p<0.001,φ=0.395。为了进一步探究组间差距的来源,我们采用卡方分割的方式进行两两比较。正如我们所预想的,高权力感组的被试比控制组(73.85%相比 51.56%,χ2(1)=6.854,p<0.01,φ=0.230)和低权力感组被试(73.85%相比25.78%,χ2(1)=30.294,p<0.001,φ=0.481)更倾向于选择智能医疗机器人为其进行服务;同样,低权力感组被试比控制组(74.24%相比 48.44%,χ2(1)=9.141,p<0.01,φ=0.265)和高权力感组被试(74.24%相比26.15%,χ2(1)=30.294,p<0.001,φ=0.481)更倾向于选择人类医生为其进行服务。二元逻辑回归进一步证明,权力感对消费者服务选择的影响显著,Waldχ2=8.865,p<0.01,假设 H1a 成立;人口统计变量均未对消费者的服务选择产生影响(ps>0.1),相关统计分析结果在后文中不再赘述。

图2 权力感对消费者服务类型选择的影响Figure 2 The impact of sense of power on consumers′choice of service type
2.1.3 讨论
研究1的结果验证了假设H1a,为假设H1提供了初步支持,说明在医疗服务场景下高权力感消费者比低权力感消费者和控制组消费者更倾向于选择机器人服务;换而言之,提升个体权力感是可以增强其对机器人服务的选择意愿。尽管如此,这一研究仅在医疗服务场景下对权力感与机器人服务的关系进行了检验,尚未确定在其他服务场景下是否存在同样的因果关系,研究2将对此进行检验。
2.2 研究2
为了增强研究结论的普适性,我们将研究1中医疗服务场景更换为宾馆服务场景,并设计了不同的因变量(消费者感知服务环境质量与支付意愿)进一步验证权力感对消费者机器人服务选择的主效应。
2.2.1 预实验
借鉴Tung等[47]的研究,我们为一家宾馆设计出两组图片,两组图片的内容为不同的服务提供者(服务机器人相比人类员工)在两个相同的服务场景下(酒店大厅与客房走廊)为客人进行服务。此外,我们使用照片处理软件遮住了员工和客人的面部以防止员工和顾客的外貌会对被试造成影响。为了提升本次实验结果的可靠性与严谨性,我们对实验刺激物进行了前测。
52名在校大学生(27位女性)参加了本次前测。在每一位被试同时观看两组图片后,我们要求被试识别每组图片的服务提供者(1=机器人,2=人类员工,3=不知道)作为我们服务提供者的操控检查,并依据他们感知的图片吸引力在1张7分量表上对每一组图片进行评分(1=非常没有吸引力,7=非常有吸引力)。
所有被试均正确识别出了每组图片的服务提供者,同时方差分析的数据结果表明,被试对每一组图片感知到的吸引力相同,M机器人服务场景=4.14,SD=0.64 vs.M人类员工服务场景=4.04,SD=0.63,p=0.376>0.100;前测结果表明,两组图片对被试的吸引力并无显著差异。
2.2.2 正式实验
研究2我们采用2(权力感:高相比低)×2(宾馆服务提供者:服务机器人相比人类员工)的组间设计来完成本次实验。320位某大学MBA学生(女性占50.00%,M年龄=27,年龄跨度25~41岁)参加了本次实验,实验奖励为获得平时成绩加分。每一位被试被随机分配到四组中的任意一组。
首先,我们采用情景回忆法(episodic priming)启动被试的权力感——让被试阐述自己有/无权力感的经历[48]。以往多项实验研究已经表明采用回忆的方法操控权力感有良好的信度和效度[49]。具体而言,在高(低)权力组,受试者将读到以下文字:请回忆你(他人)对他人(你)有权力的场景或例子。在这里,权力指的是你(他人)控制他人(你)是否能够得到他们想要的东西,或者你(他人)评价他人(你)的情景。请尽量详细地阐述发生了什么,你当时的感受是怎样的等等,并要求被试写在纸上。任务完成后,我们使用一个7分题项测量了他们的权力感[25]。
然后我们要求被试想象他们要入住一家宾馆,每一位被试将看到一组由服务机器人或人类员工提供服务的图片(与预实验相同),在服务提供者为机器人的条件下,图片下方的文字为[14]:如上图所示,本次将由我们宾馆的员工为您提供登记办理与引路服务,她的名字叫小A,是一位类人服务机器人,在B城市出生并长大,小A的外表和智力与人类无异,她可以依据客人过往的消费记录自主的为客人推荐合适的房间,她很享受为客人提供服务;在服务提供者为人类员工的条件下,图片下方的文字为[14]:如上图所示,本次将由我们宾馆的员工为您提供登记办理与引路服务,她的名字叫小A,她可以满足客人提出有关房间的需求,她很享受为客人提供服务。
在被试观看完图片后,我们使用两个7分题项测量了被试感知宾馆服务环境的质量(如“这家酒店对我很有吸引力”,α=0.876)[47],并要求被试表明他们入住这间宾馆一晚所愿意支付的价格(价格区间:500元~1000元),最后收集了他们的人口统计学信息,致谢,并结束本次实验。
2.2.3 结果分析
操纵检查。首先,我们检验了本实验的情景回忆法是否成功地激发了被试的权力感。方差分析结果如表2所示,结果表明,高权力感组权力感均值为5.39,低权力感组权力感均值为2.61,两者具有显著差异,说明权力感操纵成功。

表2 权力感操控检验Table 2 M anipulation check of sense of power
感知宾馆服务环境质量。图3为权力感与宾馆服务提供者类型对消费者感知服务环境质量影响的统计分析。参照过往的研究,我们将测量感知宾馆服务环境质量的两个题项的均值作为被试感知宾馆服务环境质量的指数,并以这一指数为因变量进行多因素方差分析,结果表明,权力感与宾馆服务提供者类型对感知宾馆服务环境质量的交互效应显著,F(1,316)=615.459,p<0.001,ηp2=0.661。当服务提供者为服务机器人时,高权力感消费者感知宾馆的服务环境质量显著高于低权力感消费者,M高权力感=5.54,SD=1.03相对M低权力感=2.86,SD=0.80;F(1,316)=364.982,p<0.001,=0.536。相反,当服务提供者为人类员工时,低权力感消费者感知宾馆服务环境质量显著高于高权力感消费者,M高权力感=3.49,SD=0.91 相对M低权力感=5.73,SD=0.82;F(1,316)=255.358,p<0.001,=0.447。

图3 权力感和服务提供者类型对消费者感知服务环境质量的影响Figure 3 The impact of the sense of power and the type of service provider on the consumers′perception of service environment quality
支付意愿。图4为权力感与宾馆服务提供者类型对消费者支付意愿影响的统计分析。为了检验我们的假设,我们使用多因素方差分析法对被试所愿意支付的价格进行检测(为了修正积极偏度,我们参照Ding等[50]的办法,同时使用LOG函数将消费者愿意支付的价格进行对数转换,但数据分析结果无差异)。分析结果表明,权力感与宾馆服务提供者类型对被试所愿意支付价格的交互效应显著,F(1,316)=248.618,p<0.001,η2p=0.440。如图4所示,当服务提供者为服务机器人时,高权力感被试所愿意支付的价格要显著的高于低权力感被试所愿意支付的价格,M高权力感=¥782.38,SD=113.42相对M低权力感= ¥607.58,SD=84.56;F(1,316)=107.365,p<0.001,η2p=0.254。与之相反的是,当服务提供者为人类员工时,低权力感的被试面对人类员工时所愿意支付的价格要显著的高于高权力感被试,M高权力感=¥585.63,SD=90.21相对M低权力感= ¥787.00,SD=131.84;F(1,316)=142.493,p<0.001,η2p=0.311。研究结果进一步表明,相较于低(高)权力感消费者,高(低)权力感消费者与服务机器人(人类员工)更为匹配。
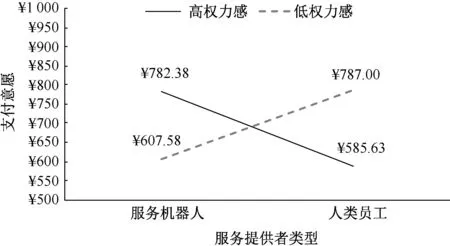
图4 权力感和服务提供者类型对消费者支付意愿的影响Figure 4 The im pact of the sense of power and the type of service provider on consum ers′w illingness to pay
2.2.4 讨论
研究2通过更换不同的服务场景验证了假设H1b,进一步支持了假设H1,同时使用了不同权力感的操控方式与更为直观的因变量提升了研究结论的稳健性。但研究1与研究2缺乏对权力感影响消费者机器人服务选择内在机制的探讨,同时尽管我们的研究2已经使用了具有一定社会阅历的MBA学生样本,但仍未解决实验法中学生样本可能产生同质性的问题。上述两个问题我们将在研究3中重点解决。
2.3 研究3
研究1与研究2结果表明个体权力感显著正向影响消费者对机器人服务的选择。与研究1和研究2中使用实验法操控被试临时权力感不同,研究3将采用社会调查的方法,通过测量权力感的方式检验被试在餐厅这一服务场景下使用智能机器人设施的意愿,以提升研究结论的稳健性;同时检验自我效能感的中介作用以验证假设H2;考虑到实验法中学生被试的同质性过高,实验结果的外部效度可能不足,为了弥补这个缺陷,研究3选取的样本为社会人士。
2.3.1 调查过程
我们使用Qualtrics系统编制了调查问卷,通过Amazon′s Mechanical Turk网络平台以在线问卷调查的方式招募了350名被试。多项研究指出,Amazon′s Mechanical Turk作为权威的网络问卷收集平台,有着广泛的样本群体和可信的数据来源[51]。350名被试全部为美国人(195位女性,M年龄=34岁),作为奖励,每位被试可以获得0.5美元的报酬。
首先,与研究1中操纵个体的权力感不同,在被试进行决策任务之前,我们通过使用Anderson等[6]开发的权力感量表(如:我的话语很有分量;我能让身边的人都听我的;α=0.821)以测量被试的长期权力感。
其次,我们参照Gursoy等[52]的研究将服务的发生场景替换为餐厅。被试首先阅读了一段有关机器人在餐饮行业应用的文字:人工智能机器人已经可以取代餐饮行业的雇员并将胜任他们的工作。这些机器人可以模拟人类的行为(如说话、行走),并且非常智能化(如学习、分析)。人工智能机器人可以提供诸如问候客人、传递饮食、回答询问、提供建议等服务。然后我们使用三个七分题项测量被试在餐厅中使用智能机器人的意愿(如,可以与智能机器人进行交互使我感到开心;α=0.794)[52],得分越高表明被试的使用意愿越强。
最后,为了能更清晰的洞察不同权力感消费者对机器人服务的选择过程,我们参照Ralf等[53]的方法测量了被试的自我效能感(如,无论智能机器人在服务过程中出现什么问题,我都能应付自如;α=0.763),得分越高表明被试的自我效能感越高。最后我们收集了被试的人口统计学信息,致谢,并结束本次调研。
2.3.2 结果分析
有34名被试没有通过我们问卷中的注意力检查,最终我们回收到有效问卷316份,有效问卷回收率90.29%。
智能机器人使用意愿:依据前人的研究[6],我们首先通过计算被试在权力感量表上八个题项得分的均值得出被试的权力感水平,得分越高表明被试的权力感越高,反之则越低。我们以被试的权力感水平为自变量,消费者智能机器人使用意愿为因变量进行线性回归分析后发现,权力感正向影响消费者智能机器人使用意愿,ß=0.171,t=3.169,p<0.010,结果与研究1和研究2相同。
中介检验:首先,正如前文所言,高权力感的被试相对于低权力感的被试对智能服务机器人有更高的使用意愿,ß=0.171,t=3.169,p<0.010;其次,通过以个体的长期权力感为自变量,以自我效能感为因变量的线性回归结果表明:相对于低权力感个体,高权力感个体面对智能服务机器人时自我效能感更高,ß=0.465,t=6.967,p<0.001。此外,自我效能感显著正向影响消费者智能服务机器人的使用意愿,ß=0.356,t=9.301,p<0.001。最后,我们将个体的长期权力感、自我效能感以及对智能机器人的使用意愿共同放到模型中进行回归分析,结果表明:个体的长期权力感对宾馆选项偏好的直接效应不显著,ß=0.006,t=0.121,p=0.904>0.100,个体的自我效能感对智能机器人使用意愿的影响显著,ß=0.354,t=8.595,p<0.001。 然后,参照 Hayes[54]的做法,我们使用Bootstrapping方法进行中介效应检验[54],选用Model 4来处理数据,样本量选择5000,取样方法选择偏差校正的非参数百分位法[55-56]。分析结果如表3所示,在95%置信区间下,个体自我效能感的中介效应显著,(LLCI=0.1093,ULCI=0.2258,不包含0),效应量大小为0.1645;在控制了个体的自我效能感的情况下,消费者权力感对智能服务机器人使用意愿的直接效应不显著(LLCI=-0.9630,ULCI=0.1089,包含0),表明自我效能感的中介效应显著,假设H2成立。
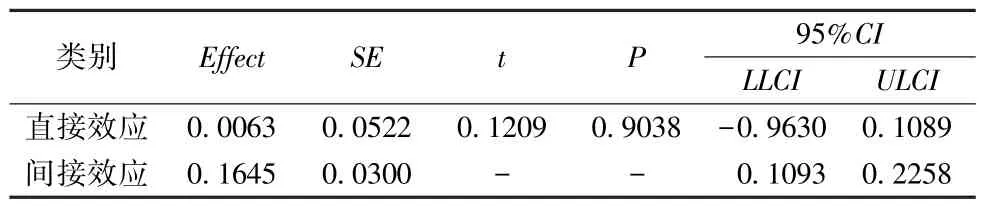
表3 自我效能感的中介效应Table 3 Themediating effect of self-efficacy
2.3.3 讨论
到目前为止,研究1、2、3都发现了一致的结果:相较于高权力感消费者,低权力感消费者对机器人服务的选择意愿较低。但这三个研究有共同缺陷,无法回答这一效应何时会发生逆转。正如假设H3所预测,当服务机器人被机械化时,低权力感消费者会提升对机器人服务的选择意愿与服务评价,与高权力感消费者在机器人服务偏好上的差异减弱。因此,本文将在研究4中重点解决这一问题。
2.4 研究4
为了直观观察机械化对权力感和消费者机器人服务选择关系的调节作用,我们将研究2中的服务机器人进行机械化处理。我们认为当服务提供者为机械化的服务机器人时,高、低权力感消费者对宾馆的感知服务环境质量与支付意愿的差异将会减弱。
2.4.1 预实验
本文将结合Martin等[14]较为简洁的方式对服务机器人进行机械化处理。具体来说,我们将研究2中服务机器人的名字替换为一个模型编号,使用“它”而非“她”这一人称主语对其进行描述;同时我们表明该机器人仅仅只是一个组装的科技产品,并不具有研究2中“员工”这一人类身份与情绪,为了验证我们机械化的操控方式有效,我们对此进行了前测。
100名在校大学生(52名女性)参与了本次预实验,被试被随机分为两组,每组被试将看到由服务机器人或机械化的服务机器人为其提供服务的图片(研究2)。服务机器人的描述与研究2一致,而机械化的服务机器人则被描述为[14]:如上图所示,本次将由我们宾馆的机器人为您提供登记办理与引路服务,它的模型编号为ZX 1000,在B城市的工厂中生产组装,ZX 1000被设计为拥有与人类相似的外观和行为,在为客人进行服务时,它拥有与人类相同的功能,它可以依据客人过往的消费记录推荐合适的房间。
被试观看完图片后,我们使用十个7分题项来测量被试感知服务提供者是机械化、无生命物体的程度(如:我如何对待服务提供者并不重要,因为该服务提供者只是一台机器、该服务提供者仅仅只是一个工具;“1=强烈不同意,7=强烈同意”,α=0.832)[57],得分越高表明被试感知服务提供者机械化程度越深。
我们将十个测量题项的均值作为被试感知服务提供者机械化程度的指数,并以这一指数为因变量进行方差分析。数据结果表明,服务提供者类型效应显著,被试感知机械化的服务机器人机械化、无生命程度更高,M服务机器人=2.27,SD=0.72相对M机械化服务机器人=5.40,SD=1.21,F(1,98)=248.845,p<0.001,说明服务机器人机械化操控成功。
2.4.2 正式实验
研究4我们采用2(权力感:高相比低)×3(服务提供者:机械化的服务机器人相比服务机器人相比人类员工)的组间设计来完成本次实验。342名 MBA学生(160位女性,M年龄=29,年龄跨度27~44岁)参加了本次实验。实验奖励是每人获得一个价值5元的笔记本。被试被随机分到了六组中的任意一组。本次实验与研究2大体相同,仅做出了一处改动,即我们将研究2中的服务机器人进行了机械化处理(具体表述在预实验中)并加入了实验组,在被试观看完图片后,我们同样使用两个7分题项测量了被试感知宾馆服务环境的质量(如“这家酒店对我很有吸引力”,α=0.853)[48],并要求被试表明他们入住这间宾馆一晚所愿意支付的价格(价格区间:500元~1000元),最后收集了他们的人口统计学信息,致谢,并结束本次实验。
2.4.3 结果分析
有两名被试中途退出了实验,最终我们得到了340份有效数据。
操纵检查。首先,我们检验了该实验的回忆法是否成功地激发了被试的权力感。方差分析结果如表4所示,高权力感组权力感均值为4.76,低权力组权力感均值为2.78,两者具有显著差异说明权力感操纵成功。

表4 权力感操控检验Table 4 M anipulation check of sense of power
感知宾馆服务环境质量。我们对数据进行2(权力感:高相比低)×3(机械化的服务机器人相比服务机器人相比人类员工)方差分析的结果表明:权力感对消费者感知宾馆服务环境质量的主效应不显著,F(1,334)=0.661,p=0.417>0.100,η2p=0.002,服务提供者类型主效应显著,F(2,334)=19.329,p<0.001,η2p=0.104,权力感与服务提供者类型的交互效应显著,F(2,334)=40.475,p<0.001,η2p=0.195。 当服务提供者为服务机器人时,高权力感消费者感知宾馆的服务环境质量显著高于低权力感消费者,M高权力感=5.60,SD=1.16相对M低权力感=3.61,SD=1.50;F(1,334)=55.985,p<0.001,η2p=0.144。相反,当服务提供者为人类员工时,低权力感消费者感知宾馆服务环境质量显著高于高权力感消费者,M高权力感=3.85,SD=1.25相对M低权力感=5.07,SD=1.62;F(1,334)=22.684,p<0.001,η2p=0.064,假设H1再次得到验证,简单效应分析的结果进一步表明,对于高权力感被试而言,无论是由未经机械化处理的服务机器人抑或是机械化的服务机器人为其提供服务,其感知宾馆服务环境质量并无差异,M服务机器人=5.60,SD=1.16 相对M机械化服务机器人=5.30,SD=1.54,p=0.798>0.100,而对于低权力感被试而言,当由机械化的服务机器人为其提供服务时,其感知宾馆服务环境质量显著高于由未经机械化处理的服务机器人为其服务,M机械化服务机器人=5.71,SD=1.12相对M服务机器人=3.61,SD=1.50,p<0.001,这也与我们的预期相一致,同时,当服务提供者为机械化的服务机器人时,高、低权力感被试感知宾馆服务环境质量无显著差异,M高权力感=5.30,SD=1.54相对M低权力感=5.71,SD=1.12;F(1,334)=2.526,p=0.113>0.100,η2p=0.008,即,机械化调节了高、低权力感消费者对机器人服务选择偏好的差异,假设H3得到验证,结果如图5所示。

图5 权力感和服务提供者类型对消费者感知服务环境质量的影响Figure 5 The im pact of the sense of power and the type of service provider on the consumers′perception of service environment quality
支付意愿。与前文相似,我们使用多因素方差分析法对被试所愿意支付的价格进行检测(为了修正积极偏度,我们参照Ding等[50]的办法,同时使用LOG函数将消费者愿意支付的价格进行对数转换,但数据分析结果无差异)。权力感对消费者支付意愿的主效应不显著,F(1,334)=0.229,p=0.632>0.100,η2p=0.001,服务提供者类型主效应显著,F(2,334)=25.377,p<0.001,η2p=0.132,权力感与服务提供者类型的交互效应显著,F(2,334)=63.553,p<0.001,=0.276。当服务提供者为服务机器人时,高权力感消费者所愿意支付的价格显著高于低权力感消费者,M高权力感=¥797.81,SD=119.06相对M低权力感=¥601.77,SD=84.00;F(1,334)=72.585,p<0.001,η2p=0.179。相反,当服务提供者为人类员工时,低权力感消费者所愿意支付的价格显著高于高权力感消费者,M高权力感=¥619.83,SD=116.34相对M低权力感= ¥773.86,SD=123.12;F(1,334)=48.694,p<0.001,η2p=0.127,假设H1再次得到验证,简单效应分析的结果进一步表明,对于高权力感被试而言,无论是由未经机械化处理的服务机器人抑或是机械化的服务机器人为其提供服务,其支付意愿并无差异,M服务机器人=¥797.81,SD=119.06相对M机械化服务机器人= ¥790.43,SD=136.85,p=0.739>0.100,而对于低权力感被试而言,当由机械化的服务机器人为其提供服务时,其支付意愿显著高于由未经机械化处理的服务机器人为其服务,M机械化服务机器人= ¥826.45,SD=126.04 vs.M服务机器人= ¥601.76,SD=84.00,p<0.001,这也与我们的预期相一致。同时,当服务提供者为机械化的服务机器人时,高、低权力感被试支付意愿无显著差异,M高权力感=¥790.43,SD=136.85 相 对M低权力感= ¥826.45,SD=126.04;F(1,334)=2.613,p=0.107>0.100,η2p=0.008,即,机械化调节了高、低权力感消费者对机器人服务选择偏好的差异,假设H3得到验证,结果如图6所示。
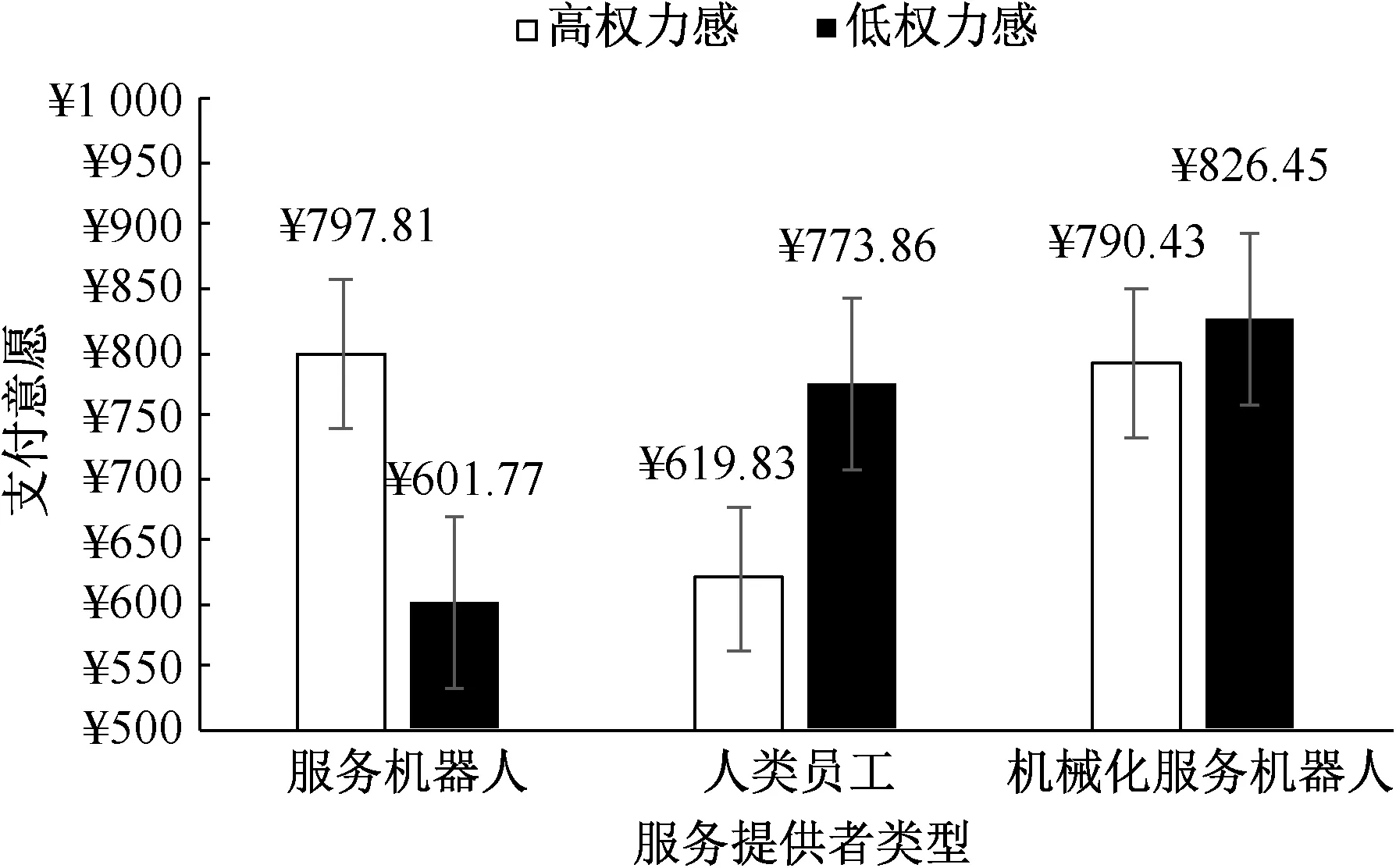
图6 权力感和服务提供者类型对消费者支付意愿的影响Figure 6 The impact of the sense of power and the type of service provider on consumers′w illingness to pay
2.4.4 讨论
研究4着重检验了机械化这一边界条件,研究结果表明,当服务机器人被机械化处理后,低权力感消费者的感知服务环境质量与对宾馆的支付意愿会得到显著提升,与高权力感个体的感知服务环境质量与支付意愿的差异会减弱。
3 结论
3.1 研究结论
本文依据权力的趋近-抑制理论[8],通过四个研究发现,相较于低权力感消费者,高权力感消费者更愿意选择机器人为其提供医疗服务(研究1)、当面对服务机器人时感知宾馆服务环境质量和支付意愿更高(研究2)、使用智能机器人的意愿较强(研究3)。这一现象发生的内在机理是,相比权力感的降低,权力感的提升增强了个体面对服务机器人时的自我效能感(研究3)。研究4推进了研究1、2、3 的结论,发现当服务机器人被机械化处理后,低权力感消费者对机器人服务选择的效应会发生逆转,与高权力感消费者在机器人服务选择上的差异会减弱。
3.2 理论贡献
本研究为现有的权力感以及机器人服务研究均作出了一定的贡献。
(1)首先,随着服务机器人智能化水平的提升与广泛的应用,如何合理有效整合机器人技术以实现服务价值共创成为学界关注热点[11]。但现有文献大多从技术性能视角对机器人服务与人工服务的相对重要性争论不休,忽视了对消费者采用机器人服务前因变量的探讨。而本研究则从社会交互角度出发,验证了对机器人服务的选择与评价是由于消费者自身的权力感差异所决定的,为后续有关机器人服务的研究添加了新的视角与内容。
(2)其次,据我们所知,至今为止尚无研究将权力的趋近-抑制理论应用到服务机器人的场景中。过往研究依据权力的趋近-抑制理论[8]探究了社会联结、调节焦点和认知加工方式等话题[58],而本研究则依据权力的趋近-抑制理论探究消费者机器人服务选择这一话题,进一步延伸了权力的趋近-抑制理论[8]的应用边界;同时厘清了自我效能感是影响权力感对消费者机器人服务选择的内在解释机制,加深了对权力感影响的认知。
(3)最后,本文还发现高、低权力感消费者对机器人服务偏好的差异受到机械化的影响。现有关于机械化的研究多集中于心理学领域[44],消费者行为领域的研究仅探究了服务机器人机械化对消费者补偿性消费的抑制作用[14]。与之不同的是,本研究关注的是机械化是否会影响消费者对机器人服务本身的选择与评价,实证研究结果表明,将服务机器人机械化是可以增强低权力感消费者对机器人服务的选择与评价,从而减弱其与高权力感消费者在机器人服务偏好上的差异。这一发现是对现有机械化文献的进一步拓展,推动了其理论体系的完善。
3.3 管理启示
(1)本文的研究结论表明,相较于低(高)权力感消费者,高(低)权力感消费者更愿意选择机器人(人工)服务。对于机器人服务与人工服务并存的企业而言,可以通过数据库技术,依据职位、会员身份等信息识别出消费者的长期高低权力感状态,并以此作为服务市场细分的依据,实行差异化的服务营销策略,依据不同权力感的消费者为其选择机器人或人类雇员为其进行服务,以达到精准服务的目的,从而提升企业的服务绩效。
(2)同样,对于单一服务类型(机器人服务或人工服务)占主导的企业而言,应结合自己的核心服务,注重在服务沟通过程中运用环境气味、背景音乐和概念隐喻等各种手段进行启动和操控消费者的权力状态,近期的研究结论表明,营销环境中不同的气味可以有效激发个体产生不同的权力感知[26]。相比冷气味(如薄荷味),环境中的暖气味(如香草味)更能激发人们处于高权力感状态。因此,对于机器人(人工)服务业务占主导的企业,可以在为顾客服务时使服务场景中充斥着薄荷味(香草味),从而提升消费者对服务环境质量的评价,进而增强其消费意愿。
(3)随着机器人服务规模化日益成为政府与企业未来重点发展的方向,商家应善于使用机械化这一手段“助推”低权力感更好、更愿意选择机器人服务,对于高龄老人、残疾人及留守儿童等长期低权力感群体,在未来推广其机器人服务时可以注重将服务机器人描述为无人类特征的工具,从而提升弱势消费者群体对机器人服务选择的意愿,进而增强他们的福祉。
3.4 研究局限与展望
(1)本研究基于个体权力感差异的视角探究了消费者对机器人服务与人工服务的相对偏好与接受程度,但忽视了对另一种服务人机协作服务的探讨;而未来研究则可以站在组织管理的层面,构建更为完整的理论框架,收集层级数据(员工-消费者),使用跨层分析等统计方法探究如何科学设计一线营销人员与智能服务机器人的配合方式才能提升消费者服务体验,从而增加企业利润。
(2)本研究基于恐怖谷效应表明,服务机器人机械化程度越高则个体感知的身份威胁与不适感越弱,而拟人化则加强了这一效应。但Aggarwal等[59]的研究指出,将品牌拟人化成伙伴或仆人可以有效降低消费者的不适感。本研究可能忽视了不同拟人化类型对消费者机器人服务选择的边界作用,未来研究可以在智能机器人领域加强对拟人化类型作用的探讨。
