浅海多节点环境参数测量数据融合方法研究
2022-05-17谢李祥邢传玺张东玉吴耀文
谢李祥,邢传玺,张东玉,吴耀文
(云南民族大学电气信息工程学院,云南昆明 650500)
0 引 言
由于海洋环境信息源的不断增加和及时准确获取海洋信息的重要性,使得各种数据融合技术不断被应用于海洋监测领域。在目前国内外的海洋环境监测设备中,各类不同的传感器成为监测海洋的必备节点。但由于传感器本身的测量精度、内部结构和高斯噪声等[1]使得获取的海洋参数存在一定的偏差,同时,监测地点的外部环境干扰也是降低数据精确度的原因之一。为了更加精准地获取监测数据,降低传感器测量误差,通常通过改进传感器硬件结构,减少采集误差;或直接通过对采集的原始数据进行去噪处理,降低噪声对采集数据的影响[1]。目前在上述方法的基础上,使用多传感器融合技术,将多传感器获取的数据进行滤波融合,可以得到更加稳定可靠的数据。
获取准确的水声信号是进行声速剖面反演、目标检测等[2]的首要问题,并且在进行水声信号获取时,需要对实验区域的水质环境有一个全面的认识。因此,本文基于及时获取浅海环境参数和水声信号采集运用的背景,引入具有广覆盖、低成本优点的窄带物联网(Narrow Band Intcrnct of Things,NB-IoT)技术,并使用自适应加权融合技术和模糊综合评价方法对采集数据进行融合。获取到监测平台通过NB-IoT无线传输模块回传的原始数据后,采用模糊理论中的相关性函数剔除异常数据,提高数据精度;随后将剔除异常数据的数据集进行自适应加权融合,为下一步融合提供数据输入;最后使用模糊综合评价方法进行二级融合。
相比于传统的自适应加权融合算法和算术平均算法,本文额外考虑了实际运用中水质采集偏差的影响,进行异常数据剔除,大大提高了第一级数据融合的精度,并最终以概率形式直观地展示出水质评价结果。为海洋保护、治理与开发提供精确的数据和科学决策的依据。
1 浅海水质参数获取平台设计
本文设计基于的是NB-IoT的浅海环境参数获取平台采集所测海域的基本环境信息。该平台将多传感器搭载在移动浮标上[3],构成数据采集终端,数据采集终端通过 STM32F407驱动多种水文传感器获取水质参数,并将其存储于自身的存储介质中,防止数据丢失,同时使用NB-IoT无线传输模块,及时地将环境参数上传到远程控制中心[4]。在远程控制中心可以实时观测获取各项环境参数,并对控制中心保存的环境参数进行数据融合处理,为科学决策提供数据。单节点数据采集终端硬件结构如图1所示。

图1 单节点采集终端硬件结构Fig.1 Hardware structure at the single node acquisition terminal
主控芯片采用具有高性能、低功耗、实时性特征的STM32F407芯片[5],该芯片具有6个串口,通过搭载SP3485芯片实现USART转485接口,实现与各数据传感器的通信。其主要负责驱动各传感器获取环境参数,并将其存储,同时,使用NB-IoT无线传输模块上传环境参数与节点地址。电源管理模块主要负责给整个系统供电,采用高能密度电池组,完成长时间采集;并使用太阳能板对电池组进行充电[6],实现系统的低功耗。
数据采集模块主要负责获取所测区域的水质环境参数。通常获取的主要水质参数包括:温度、PH 值、浊度、溶解氧(Dissolvcd Oxygcn, DO)和电导率(Elcctrical Conductancc, EC);营养盐:氨氮、总磷和总氮[7];重金属离子(铜、锌等)和化学需氧量(Chcmical Oxygcn Dcmand, COD)等。本文主要针对溶解氧、氨氮、总磷、总氮和化学需氧量五种环境参数进行采集[8]。其中溶解氧通过 DOLE6211溶解氧传感器连接DO6400溶解氧变送器获取,其传感器测量分辨率为 0.01 mg·L-1,测量误差小于±0.1 mg·L-1;氨氮、总磷和总氮采用N-1000系列高度集成的营养盐分析仪获取,该传感器可连续批量处理,测量精密度小于 3%;化学需氧量通过TK-C100型光学COD在线检测传感器获取,该传感器量程为 0.1~5 000 mg·L-1,分辨率为0.1 mg·L-1。
本文所采用的各水质传感器均采用 RS485通信方式。RS485采用数字通信方式,具有抗干扰能力强和传输距离远等优点[9],避免了长距离传输模拟信号导致数据误差大,并且RS485通信采用一主多从的网络连接方式,即STM32F407为主机,各水质传感器为从机。同时RS485采用同名端连接方式,即各传感器的通信线A+与主控芯片RS485串口的A+相连接,各传感器的通信线B-与主控芯片RS485串口的B-相连接[10],具体连接示意图如图2所示。
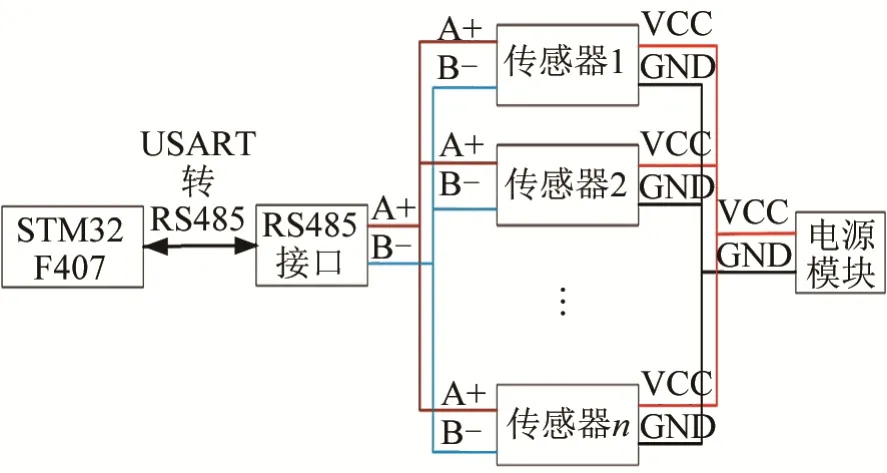
图2 水质监测系统的连接图Fig.2 Connection diagram of the water quality monitoring system
各水质参数传感器均使用标准的Modbus-RTU通信协议。从Modbus-RTU通信协议的数据帧格式中可知标记从机地址的地址码占用一个字节,故在一个RS485的通信网络中,从机的地址为1~255,即可最多挂载255个从机,满足系统开发需求[10]。通过Modbus-RTU通信协议数据帧格式中的功能码依次对水质传感器进行读和写操作,即可获取各项水质参数。
无线传输模块主要负责将各水质传感器获取的数据发送到远程控制中心。无线传输模块采用与短距离通信技术 Zigbcc、LoRa、蓝牙、Z-wavc等相比较有着传输距离远、低功耗、成本低等优点的NB-IoT模块[11-12]。NB-IoT模块主要由BC35模块、复位电路、SIM卡槽和SMA天线组成。并且该模块通过USART3与主控芯片相连接,主控芯片通过发送AT指令控制NB-IoT无线传输模块,进行数据上传,完成浅海环境水质参数获取。
通过前期验证性实现,该参数获取平台基本功能已完成,可实现浅海水质参数的采集、存储及发送,满足环境参数采集要求。
2 数据融合
数据融合也称为多传感器数据融合,是将多传感器获取的数据进行综合分析处理,实现对监测环境科学统一的评价。即通过多种环境参数传感器获取到水质信息后,采用合理的去噪算法对其进行合理分析与处理,并从多方面把各项水质环境因子按照某种优化模型结合起来,产生对水质等级评价的一致性判定,并利用多传感器的联合操作优势来提高整个系统的有效性[13],减少使用单一传感器的不确定性。多传感器数据融合按照融合级别可划分为:数据级融合、特征级融合和决策级融合三个等级[13]。同时,由于多传感器融合算法的特点和适用范围不同,因此在实际运用中通常将两种或两种以上的算法集合在一起进行数据融合,按照集合方式可分为:串联型数据融合、并联型数据融合和混联型数据融合[14]。根据水质环境监测的具体运用和获取参数的方式,将水质环境监测的数据融合结构设计为:两级并联型数据融合,其融合过程如图3所示。其中,每组传感器均使用5个同类传感器进行数据采集。
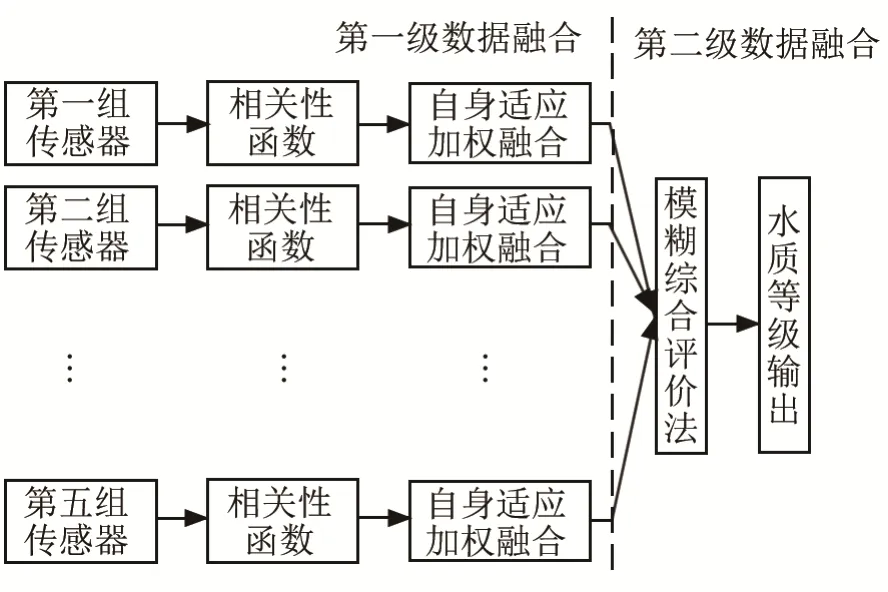
图3 采集数据融合过程示意图Fig.3 Schematic diagram of fusion process of acquisition data
2.1 相关性函数


2.2 自适应加权融合算法

自适应加权融合算法的基本结构如图4所示。

图4 自适应加权融合算法结构Fig.4 Structural diagram of adaptive weighted fusion algorithm

2.3 模糊综合评价方法
模糊综合评价方法即使用模糊数学隶属度的理论,将对受到多种因素影响事物或对象做出一个综合的评价[19]。它能够给出一个清晰的评价结果,其评价结果以概率形式展现,能够很好地克服模糊性和难以量化的问题。其基本步骤是首先构建综合评价指标,即根据某一标准确定评价等级;然后需要确定对应评价等级的影响因子,即在具体运用中采集到的数据集;在获取到不同的数据集后,需要根据每类参数的重要程度确定权重向量;再通过合适的隶属度函数建立模糊关系评价矩阵;最后将模糊关系矩阵与权重向量合成,输出最终的评价结果[19],其流程如图5所示。

图5 模糊综合评价方法流程Fig.5 Procedure of the fuzzy comprehensive evaluation method
2.3.1 构建综合评价指标
评价指标即是评价者通过综合多种影响因子,对某一事物做出一致性评价等级的集合。本文依据GB3838—2002《地表水环境质量标准》[20]将综合评价指标划分为T={Ⅰ类, Ⅱ类, Ⅲ类, Ⅳ类, Ⅴ类},其评价指标越大水质环境越差。
2.3.2 确定评价对象因素集
评价对象因素集即为影响评价指标的各因子的集合X={xi} ,i=1 ,2,…n,其中n表示评价对象因素集的个数,即综合n个影响因子来确定最终的综合评价等级。在本文中根据获取到的水质环境参数,将评价对象因素集设置为X={x1,x2,x3,x4,x5},其中x1到x5分别表示水质环境参数获取平台采集的DO、氨氮、总磷、总氮和COD的数值。
在本文中确定权值即是确定各影响因子(溶解氧、氨氮、总磷、总氮和化学需氧量)对于水质环境质量评价等级影响程度的强弱。在实际的运用中,权重的取值直接影响着最终评价结果的优劣,所以确定一个合理的权值向量十分重要。在实际运用中经常采用专家经验法、层级分析法和熵值法进行权值的确定,但专家经验法与层级分析法主观因素较重,使得获取的权值经验化和片面化,使得评价结果具有随机性。熵值法可以得到某个指标的离散程度。进而通过不同指标的离散程度来确定对于综合评价指标的影响程度。在信息论中,通过计算熵值来判断某一指标的无序程度,熵值越小,则无序程度越低,离散程度越大,对于综合评价指标的影响程度也越大,故对应的权值越大[21]。熵值法通过评价因子的离散程度来确定各影响因子的权重,避免了专家经验法与层级分析法的主观性,提高了权重向量的准确性与客观性,同时由于本文水质参数获取平台采集的数据均为离散型数据,满足熵值法使用条件,因此本文采用熵值法确定权值向量W,具体步骤如下:

2.3.4 建立模糊评价矩阵


2.3.5 输出多指标综合评价

3 算法实现与环境判决方法
为了验证本文方法的可行性与可靠性,将数据采集终端通过移动浮标放置于某湖泊中进行验证性实验,现场测试图如图6所示。

图6 现场测试图Fig.6 Picture of field test
水质传感器放置于水下1 m处,每10 min采集一次,每次采集5组数据,每组数据包括5个同类水质传感器获取的数据,共采集 50次。最后将每次采集的数据通过NB-IoT无线传输模块上传到远程控制中心,在远程端使用LabVIEW软件实现环境参数的实时观测与数据存储,采集完成后对存储的数据进行融合,提高浅海环境观测实时性,其远程端可视化界面如图7所示。同时,本文采集所需数据的时间仅为8.4 h,与文献[23]相比有更短的采集周期,进一步提高了观测实时性与融合实时性。

图7 可视化界面Fig.7 Visual interface
数据融合具体步骤如下:
(1) 对每一组同类水质传感器进行剔除异常数据操作和数据融合操作,即第一级数据融合,为下一级数据融合提供输入。本文以营养盐分析仪获取的氨氮数据进行验证与分析,其余数据处理方法均一致。
① 获取到氨氮数据之后,先将5个传感器数据的均值与方差计算出来,便于后续操作,具体数据如表1所示。

表1 各传感器测量的氨氮数据均值与方差Table 1 Mean and variance of ammonia-nitrogen data measured by each sensor
将表1中的数据代入式(1)、(3)可得置信矩阵DN为
3.提高了民主管理程度,党风廉政建设卓有成效。厂务公开的推行,使一号煤矿的党建工作、企业文化、队伍建设、内部管理得到加强,领导班子成员的大局意识和责任意识有所提升,多种形式加强领导干部民主评议工作,干部作风得到改进;加大公开选拔干部的力度,增强了职工的向心力和凝聚力,也促进了企业内部和谐氛围的营造及各项工作的顺利开展,民主管理的有效推行使得一号煤矿的企业党风廉政建设卓有成效,干部职工上下齐心,干群关系融洽,以优良的品质、过硬的作风为一号煤矿的发展贡献力量。

根据式(9)、(10)可得相关性矩阵GN为

② 使用剔除异常数据后的新数据进行自适应加权融合,首先通过式(17)计算出各组传感器对应的权值W=[0.240 0.135 0.240 0.146 0.240],然后将权值代入式(13)(式中的Ui在此处为传感器数据的均值)即可获得第一级的数据融合值。
(2) 通过第一级的数据融合之后,5组传感器分别输出对应的第一级数据融合结果;然后将剔除异常数据的各组数,据根据熵值法确定5组传感器对应的权值w=[0.160 0.238 0.192 0.236 0.174];
获得第一级融合结果和各组传感器对应权值后,根据GB3838—2002《地表水环境质量标准》[20]确定对应评价指标的标准值,并根据标准值计算出对应的标准差,结果如表2所示。
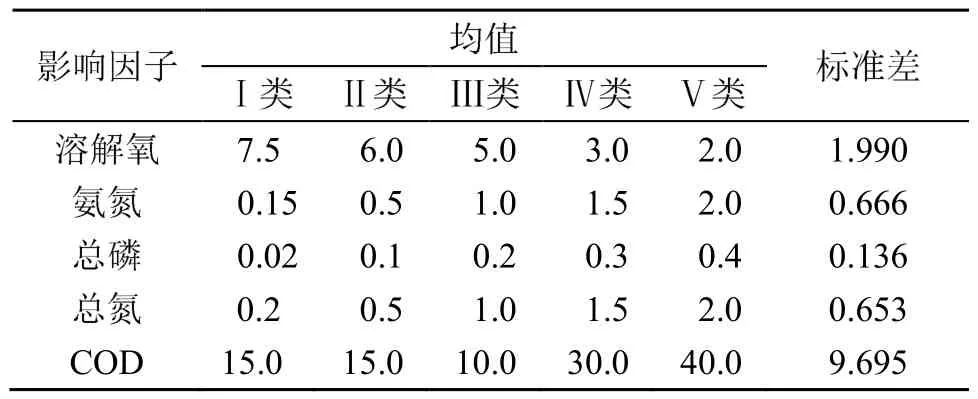
表2 影响因子均值及标准差Table 2 Standard values and standard deviations of impact factors
然后根据隶属度函数式(24),并归一化后得到模糊评价矩阵K:

最后将权值向量w和模糊评价矩阵K代入模糊算子模型F中,将得到最终的评价结果,如图8所示。
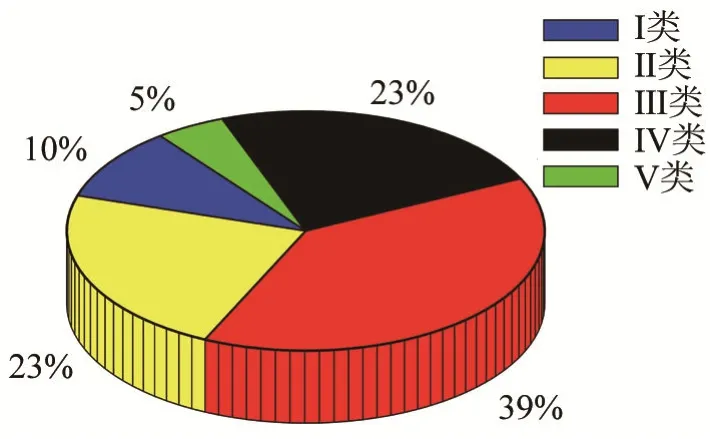
图8 水质等级评价结果Fig.8 Result of water quality grade evaluation
从图8中可以看出,39%的占比为水质等级Ⅲ类,是水产养殖区等渔业水域及游泳区,与实际情况相符,且由最终的评价结果为Ⅲ类,可得影响因子氨氮对应的标准值为 1.0,通过上述计算得到第一级数据融合结果,而使用未考虑实际运用中水质参数采集偏差的传统自适应加权融合算法和算术平均算法得到的第一级数据融合结果分别为1.304和1.344,则对应的相对误差分别为Y2、Y3:

其中:Y1为剔除异常数据后使用自适应加权融合算法的相对误差。
从式(27)中可明确观测到本文考虑实际采集偏差算法的相对误差仅为 6.5%,满足第一级融合要求,且明显优于后两种传统融合算法。同时最终的评价结果相对于通过单一传感器和人为观测水质环境,更加准确直观地提供了水质监测结果,为科学决策和环境治理提供了可靠有效的数据来源。
4 结 论
本文基于传统水质监测设备观测不及时、使用单一传感器观测水质片面及评价水质不合理的缺点,设计了一套基于NB-IoT组网的数据回传水质监测平台,并在远程控制中心引入多传感器数据融合算法,使得监测数据能够及时上传到远程控制中心,避免了人工回收数据成本高和处理不及时的缺点。同时使用多传感器数据融合算法,能有效克服使用单一传感器观测水质的局限性,并在具体运用过程中,使用模糊理论中相关性函数确定各传感器支持程度,剔除异常数据,和使用熵值法确定权值向量,使得本文融合方法更加合理。最后经试验证明:该水质监测设备能及时准确地反馈监测水域水质参数,多传感器数据融合算法能合理简洁地反映所测区域水质等级,满足浅海环境水质监测需求。