三轴磁通门传感器温漂误差分析及其校正方法❋
2022-05-17李予国丁学振封常青
刘 浩, 李予国,2,3❋❋, 丁学振, 封常青
(1. 中国海洋大学海洋地球科学学院, 山东 青岛 266100;2. 中国海洋大学海底科学与探测技术教育部重点实验室, 山东 青岛 266100;3. 青岛海洋科学与技术试点国家实验室 海洋矿产资源评价与探测技术功能实验室, 山东 青岛 266237)
三轴磁通门传感器具有鲁棒性好、分辨率高、成本低及功耗小等优点,已成为矢量磁测中应用最为广泛的传感器[1-4],在地球科学研究、地磁探测和地磁导航等领域发挥着重要作用[5-7]。在恒定磁场中,理想三轴磁通门传感器的输出值应恒等于被测磁场的真实值,传感器输出的总场模值(即总模量)应为常数,不随测量姿态发生变化[8]。然而,三轴磁通门传感器不仅受加工和安装工艺的限制[9-10]普遍存在三轴非正交误差、标度系数误差和偏移误差三种系统误差[6,11-13],而且因为绕制线圈的热胀冷缩[14]和磁芯磁滞回线的受热偏移[4],传感器还存在温漂误差。研究表明,在28 000 nT左右的磁场中,从0~40 ℃,磁通门传感器输出值的变化量达200 nT[4]。以上误差使得传感器输出值偏离被测磁场的真实值,降低了传感器的测量精度,因而研究传感器的误差校正方法具有重要意义。
在校正三轴磁通门传感器误差时,通常只考虑传感器的系统误差,而忽略了温漂误差。对于传感器在与基准温度(即估计系统误差参数的温度)相同环境中测量的磁场数据,只考虑传感器的系统误差校正可以得到较好的误差校正效果。但是,对于传感器在温度变化或者不同于基准温度环境中测量的磁场数据,温度变化会使传感器的标度系数和零点值发生漂移[4,14],从而一定程度地影响传感器的误差校正效果,故在传感器系统误差校正的基础上,还需开展传感器温漂误差校正的研究[15-16]。
目前,国内外学者提出了多种三轴磁通门传感器误差校正方法[8-9,17-28],但这些方法大都未考虑磁通门传感器的温漂误差。在磁通门传感器温漂补偿方面,国外学者主要从传感器磁芯材料的选择和电路改进等硬件方面对传感器的温漂误差进行补偿[29-32];在国内,庞鸿锋研究了基于BP神经网络算法和基于最小二乘支持向量机(LSSVM)的温漂补偿方法[33-34];齐侃侃根据实验结果得出了磁通门传感器具有输出磁场随温度近似线性变化的特性[14]。然而,上述文献或只研究传感器的系统误差校正方法,或只补偿传感器的温漂误差,尚未展开兼顾传感器系统误差和温漂误差校正的研究,同时缺乏有效地校正温漂误差的温漂补偿模型。
本文通过温漂补偿实验和前人研究成果分析了三轴磁通门传感器的温漂特性,基于磁通门传感器输出值随温度近似线性变化的假设,利用最小二乘法建立了温漂补偿模型,并通过物理实验验证了温漂补偿模型校正传感器温漂误差的有效性;最后利用温漂补偿模型在系统误差校正的基础上对实测数据进行了误差校正,并分析了校正效果。
1 温漂补偿模型


图1 温漂补偿实验示意图Fig.1 Schematic diagram of temperature drift compensation experiment
实验中,温度记录仪与质子磁力仪主机相邻,质子磁力仪主机与探头的水平距离为2.5 m,质子磁力仪探头、三轴磁通门传感器和采集电路之间的水平距离分别为3.5和4.5 m。质子磁力仪测量地磁总场,并因其在测量原理上几乎不受温度影响[35-36],将其测量结果作为参考场,温度记录仪记录环境温度,二者采样率均为0.5 Hz;三轴磁通门传感器被固定在无磁平衡台上,采集矢量磁场数据,采样率为500 Hz,如图1所示。将质子磁力仪的每个测量值对应的1 000个三轴磁通门传感器矢量数据做“取平均值”处理,使三轴磁通门传感器采集数据与质子磁力仪测量数据对应。此时,三轴磁通门传感器实际输出值的总模量(以下简称输出总模量)、质子磁力仪测得的地磁总场和温度分别如图2中蓝线、绿线和红线所示。由图2(a)可知,三轴磁通门传感器输出总模量随实验时间呈现下降趋势,虽然地磁总场存在部分高频地磁干扰,干扰幅值最大可达10 nT,但其总体趋势是基本水平的,因此可以推测传感器输出总模量的下降趋势不是由地磁场变化造成的;由图2(b)可知,温度随实验时间呈近似线性下降趋势,所以,传感器输出总模量的下降趋势可能是由温度漂移导致的。
质子磁力仪与磁通门传感器在同一地点同时进行磁场测量时,受地磁日变的影响是一致的。为消除地磁日变对磁通门传感器输出总模量的影响,以质子磁力仪测量磁场的“第一个值”作为日变改正基值,质子磁力仪各个时刻的测量磁场减去日变改正基值并取反号,即为该时刻的日变改正值[37],然后用磁通门传感器输出总模量加上对应时刻的日变改正值得到日变校正后传感器输出总模量。分析日变校正后三轴磁通门传感器输出总模量与温度的关系(见图3红色点线),温度变化范围为5.1~6.8 ℃,传感器输出总模量的变化幅值约10 nT,且具有随温度升高而近似线性增大的趋势。磁通门传感器的温度漂移与被测磁场成正比[29],在50 000 nT的磁场中,传感器输出值的温度漂移约为1~10 nT/℃[29],某些缺少温漂补偿功能的国产磁通门传感器的温度漂移甚至可达10 nT/℃以上[15]。多位学者的研究表明,磁通门传感器在工作温度范围内具有输出值随温度近似线性变化的特性[14,29,32,38-39]。因此,可以假设磁通门传感器在工作温度范围内具有输出总模量随温度近似线性变化的特性,用最小二乘法对日变校正后传感器输出总模量随温度变化的曲线进行线性拟合,得到:

图2 温漂补偿实验结果Fig.2 The results of temperature drift compensation experiment

图3 三轴磁通门传感器温漂特性Fig.3 Temperature drift characteristics of the three-axis fluxgate magnetometer
|Bm|=at+b。
(1)
式中:|Bm|表示三轴磁通门传感器的输出总模量;t表示温度;a、b为温度补偿参数。对于本文使用的HSF型三轴磁通门传感器,经计算得到a=7.080 5,b=50 906。此时,拟合曲线(见图3绿色点线)和日变校正后传感器输出总模量随温度变化的曲线之间的均方根误差(Root mean square error,RMSE)为0.011 3 nT,拟合效果良好。
温度变化会直接影响传感器的标度系数和偏移误差[14,34],且磁通门传感器的标度系数是随温度呈线性变化的[30,38-40]。因此本文提出了以下三个假设条件,并基于这些假设条件建立了温漂补偿模型:
(1)假设磁通门传感器的标度系数和偏移误差随温度变化发生线性漂移。
(2)同一个三轴磁通门传感器的三个轴采用的磁芯材料和制作工艺是一致的,故假设由温度变化造成的传感器三个轴上标度系数和偏移误差的变化是一致的。
(3)温度变化不会造成三轴磁通门传感器轴间相对位置的变化,故假设传感器的三轴非正交误差不受温度影响。
根据以上假设,在温度为t的恒定磁场中可以有:
Bmx=αxBTx+Bbx=k(αx0BTx+Bbx0),
Bmy=αyBTy+Bby=k(αy0BTy+Bby0),
Bmz=αzBTz+Bbz=k(αz0BTz+Bbz0)。
(2)
式中:Bmx、Bmy、Bmz表示温度为t时三轴磁通门传感器实际输出的三个分量;BTx、BTy、BTz表示理想三轴磁通门传感器输出的三个分量,即被测磁场的真实值;αx、αy、αz表示温度为t时三轴磁通门传感器的三个标度系数;Bbx、Bby、Bbz表示温度为t时传感器的三个偏移误差。k表示受温度影响的比例因子,理想状态下,磁通门传感器不存在温度漂移,k应为常数1。然而,实际的磁通门传感器存在温漂误差,k会随温度变化发生改变。αx0、αy0、αz0表示基准温度t0时传感器的三个标度系数;Bbx0、Bby0、Bbz0表示基准温度t0时传感器的三个偏移误差。
由式(2)可得三轴磁通门传感器的输出总模量:
(3)
其中|Bm|表示三轴磁通门传感器在温度t时的输出总模量。
在基准温度t0时,比例因子k为1,则式(3)可写为:
(4)
其中|Bm0|表示三轴磁通门传感器在基准温度t0时的输出总模量。
当温度从基准温度t0变为t时,k随之改变,温度变化量Δt=t-t0,比例因子变化量Δk=k-1,代入式(3)可得:
(5)
根据t=t0+Δt,将式(1)代入式(5)得:
(6)
由式(1)知,|Bm0|=at0+b,则式(6)可写为:
(7)
于是,有
(8)
综上可知,在温度t时,三轴磁通门传感器的标度系数和偏移误差应满足下式:

(9)
这里α=(αxαyαz)T;α0=(αx0αy0αz0)T;Bb=(BbxBbyBbz)T;Bb0=(Bbx0Bby0Bbz0)T。
至此,建立了校正三轴磁通门传感器温漂误差的温漂补偿模型,式(9)为温漂补偿模型的数学形式。如果三轴磁通门传感器在基准温度时的系统误差参数和测量磁场时的温度已知,便可根据温漂补偿模型在系统误差校正的基础上实现传感器的温漂误差校正。
2 实验结果分析
利用基于改进差分进化算法的系统误差校正方法[28],估计得到本文HSF型三轴磁通门传感器在7.3 ℃(系统误差校正实验[28]的环境温度)时的系统误差参数如表1所示。以7.3 ℃作为基准温度,利用估计的系统误差参数和温漂补偿模型对温漂补偿实验采集的磁场数据进行系统误差和温漂误差校正,得到误差校正效果如图4所示,校正后传感器输出总模量的误差如图5所示。

表1 HSF型三轴磁通门传感器系统误差参数估计值
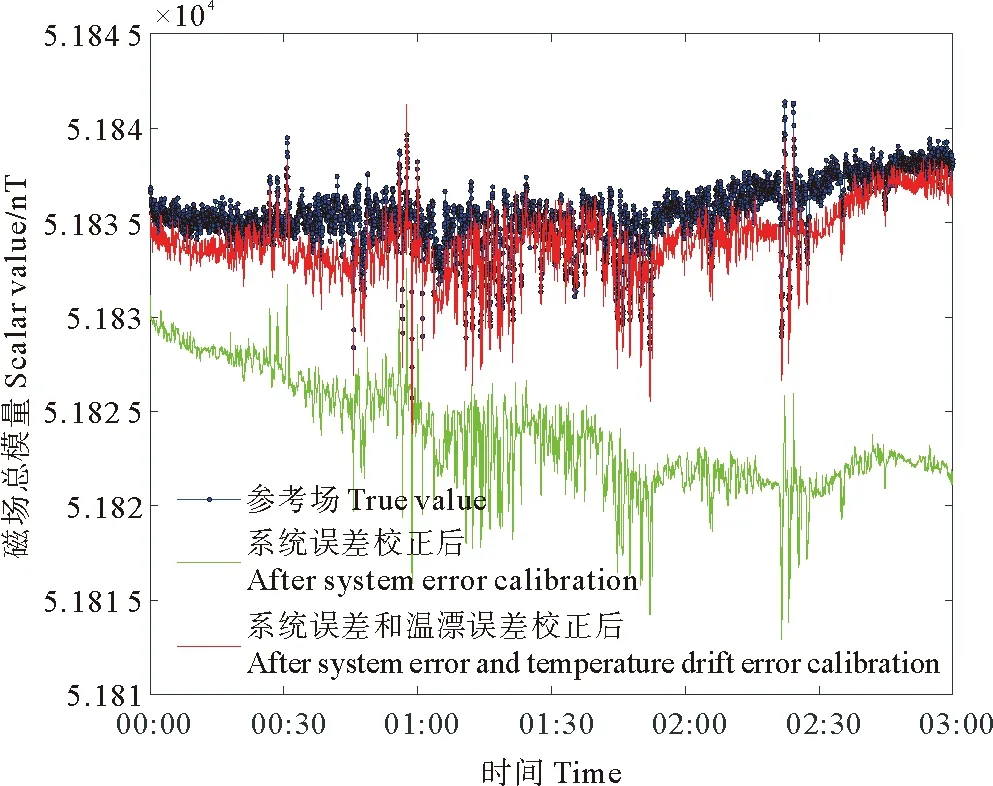
图4 温漂补偿实验数据的误差校正效果Fig.4 Calibration performance of the temperature drift compensation experimental data
为了评价三轴磁通门传感器的误差校正效果,本文以输出总模量的均方根误差(RMSE)作为评价参数进行分析。传感器输出总模量的RMSE代表了输出总模量测量误差的情况,反映了传感器的测量精度,其计算式为:
(10)
其中:|Bmi|表示传感器输出总模量的第i个值;|BTi|表示质子磁力仪测得的地磁总场的第i个值。
由图4可知,系统误差校正后传感器的输出总模量(绿线)整体小于参考总场(蓝色点线),并随实验时间呈下降趋势逐渐远离参考总场。因为温漂补偿实验中,环境温度低于基准温度,并随实验时间近似线性降低,所以输出总模量的下降趋势可能是温度降低造成的。经过系统误差和温漂误差校正后,传感器的输出总模量(红线)和参考总场之间的测量误差进一步减小,传感器输出总模量的下降趋势基本消失。

图5 温漂误差校正前后,传感器输出总模量的误差对比Fig.5 Comparison of the scalar error before and after temperature drift compensation
由图5可知,对于磁通门传感器在温度变化的环境中采集的磁场数据,只进行系统误差校正时,传感器输出总模量仍存在温度漂移,并且当采集数据的环境温度和基准温度的温差增大时,传感器输出总模量的误差(蓝线)随之增大。经计算,传感器输出总模量的RMSE从误差校正前的891.43 nT下降至15.50 nT,一定程度上减小了传感器的测量误差,但仍未达到最佳校正效果。在系统误差校正的基础上,再经过温漂误差校正,传感器输出总模量的误差(红线)减小至0 nT附近,输出总模量的RMSE进一步下降为2.76 nT,从而进一步提高了传感器的测量精度。以上分析表明本文提出的温漂补偿模型能有效地减小传感器的温漂误差,同时表明对三轴磁通门传感器进行温漂误差校正是必要的。
3 实测数据应用与分析
为了研究本文温漂补偿模型对传感器实测数据的校正效果,本文在验证点进行了实测数据采集实验。实验中,用高精度质子磁力仪测量地磁总场,采样率为0.5 Hz,并将其测量结果作为参考总场;将三轴磁通门传感器固定在三轴无磁旋转台(见图6)上,通过随机旋转三轴无磁旋转台,使传感器以任意姿态采集矢量磁场数据,每种姿态连续采集5 s,采样率为500 Hz,共采集80种不同姿态的矢量磁场数据。由于实验时间较短,温度记录仪记录环境温度几乎无变化,为12.8 ℃。为了使传感器测得的矢量磁场与质子磁力仪测得的地磁总场对应,将传感器测得的矢量磁场数据以“取平均值”的方式抽稀1 000倍,最终得到一组含200个采样点的磁场数据。以7.3 ℃作为基准温度,用本文估计的系统误差参数和温漂补偿模型校正这一组实测数据,得到误差校正效果如图7所示。

(X轴、Y轴和Z轴是三轴无磁旋转台的三个旋转轴,且分别和安装在旋转台上的三轴磁通门传感器的X轴、Y轴和Z轴平行并对齐。X-, Y-and Z-axis are three rotation axes of the turntable, which are parallel to and aligned with X-, Y-and Z-axis of the fluxgate sensors mounted on the turntable respectively.)
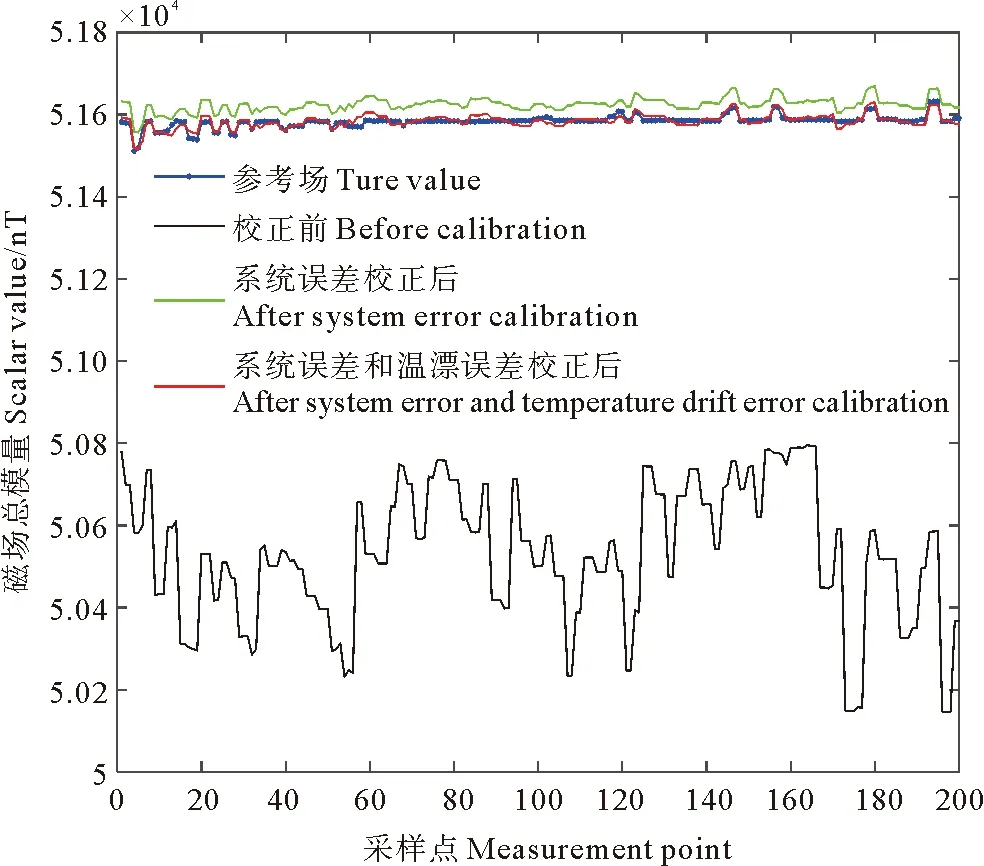
图7 验证点实测数据的误差校正效果Fig.7 Calibration performance of the experimental data at the verification point
由图7可知,实验中参考总场(蓝色点线)是不稳定的,变化范围约100 nT。误差校正前,磁通门传感器的输出总模量(黑线)随传感器测量姿态的变化剧烈波动,变化范围超过500 nT,计算得到输出总模量的RMSE达1 064.70 nT,传感器存在明显的测量误差。经过系统误差校正后,传感器输出总模量(绿线)整体大于参考总场,计算得到输出总模量的RMSE减小为41.25 nT,传感器仍存在较大的测量误差。再经过温漂误差校正后,传感器输出总模量(红线)与参考总场的幅值及变化趋势基本一致,经计算,输出总模量的RMSE减小为9.40 nT。这表明传感器采集的实测数据在系统误差校正基础上再进行温漂误差校正,能进一步减小其测量误差,提高传感器的测量精度;同时表明本文提出的温漂补偿模型对于校正传感器实测数据的误差具有一定的适用性。
4 结语
本文分析了磁通门传感器的温漂特性,基于传感器在工作温度范围内输出值随温度近似线性变化的假设,提出了基于最小二乘方法的温漂补偿模型,并根据此模型讨论了以往研究中忽略的温漂误差校正问题。温漂补偿实验结果表明,传感器输出总模量的RMSE仅进行系统误差校正时为15.50 nT,再经温漂误差校正后下降为2.76 nT。实测数据应用结果表明,在系统误差校正的基础上再进行温漂误差校正,传感器输出总模量的RMSE从41.25 nT减小为9.40 nT,从而进一步减小传感器的测量误差,提高了磁通门传感器的测量精度。本文建立的温漂补偿模型能有效地校正三轴磁通门传感器的温漂误差。
