磁导航自动小车运动偏差控制研究
2022-05-16李金龙石瑞芳
李金龙 石瑞芳

摘要对于AGV小车预设运动路径偏离自动修正问题,针对双电机差速驱动轮式小车,采用线性二次型调节器完成算法设计进行偏差自动纠正。首先对运动路径偏差进行分析建模,对驱动性能建立状态分析模型,其次用软件进行仿真验算从而得到最优控制规律构成闭环控制设计。之后依据所得控制算法模型与通常的闭环控制算法进行比较分析,说明该控制方法的优点。
关键词 AGV 线性二次型调节运动路径算法
1 前言
AGV小车是现代生产、物流企业普遍采用的运输设备,很大程度上提高了企业自动化水平。其导航方式也有很多,从成本角度来说磁导航小车是较低的,但其运行的稳定程度及精准度相对来说也较低。目前普遍采用的PID闭环控制方式,也有将PID算法与神经网络结合的控制方式使其具备自我学习能力;还有将其与模糊控制结合的。从实际应用结果来看自动导引小车运动轨迹的非线性和非完整约束性使得反馈的参数准确度不是很高,即时性也稍显不足,在运动速度过快时会脱离磁轨而失控,其工作可靠性需要进一步提升。在PID闭环控制过程中参数值的微小变化即可对运行轨迹产生较大影响,需要的控制参数要通过多次实验后优化得到,并非最优参数。若在磁导航中使用加权浮点运算处理所反馈回的信号,则又使得运算资源不足,延长了即时响应时间。
2轮式小车运动轨迹分析
通常AGV小车采用四轮前驱或后驱形式,若采用后轮驱动,则前轮只负责方向控制。其在转向时的位置偏移情况可用下图图1所示情况表示。
图中以平面坐标形式表示偏移量,偏移角度以ω标示、图中两驱动后轮之间距离设为L,将方向偏差造成的弧线半径及瞬间圆心定为R和O',驱动轮(左右)的速度分别定为V1和V2,中心速度定为V,运动方向上将X轴和Y轴方向做为运动的正方向,偏移距离设为Δh,偏移角度设为θ,运动瞬间圆心到两驱动轮距离分别定为R1和R2。从通常应用环境角度出发,设定小车运动为平面光滑无摩擦刚性情况;前轮为仅起支撑和转向作用的万向轮;导向磁条连续平直无误差;车体速度与其质量无关。
小车由两个独立的直流电动机负责驱动,其速度差决定小车的转向及路径偏差纠正效果。在刚开始运动时若小车处于磁条正中沿磁条方向做匀速直线运动,受外力影响运动方向与磁条方向间发生偏移,则产生弧线运动路径,可推导其運动轨迹如下:
3 控制系统结构分析设计
因磁导航方式下次小车的位置信息来源于磁性开关传感器检测到的磁条磁性信号,通过相应小车底部相应位置检测反馈情况判别当前所处位置及角度是否有偏差和偏差大小,结合上文中的控制模式,可以算出最优的控制量来让位置偏差得到很好的控制,具体控制系统组成见下图图4。
由上图的反馈控制过程可列出该系统的控制方程如下:
上式中[k1,k2,k3] 是反馈增益的矩阵,再由LQR指标对设计控制方程,可得函数式如下:
该闭环控制系统是稳定系统,在t值趋于极大值时X(t)值趋0,故对上式微分,再将R-1BTP赋值于k,综合可得:
4对系统进行仿真结果
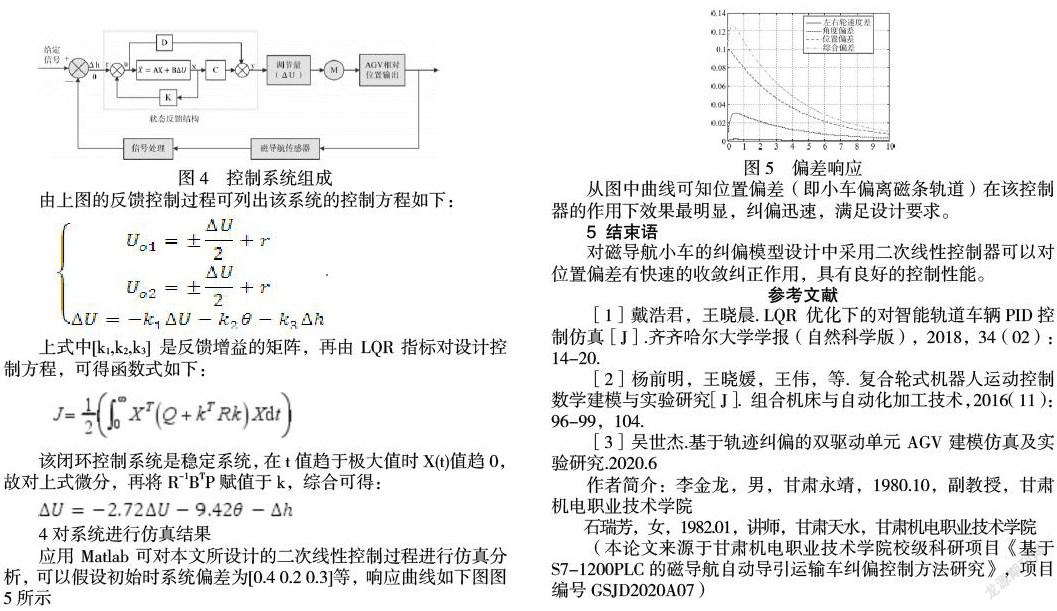
应用Matlab可对本文所设计的二次线性控制过程进行仿真分析,可以假设初始时系统偏差为[0.4 0.2 0.3]等,响应曲线如下图图5所示
从图中曲线可知位置偏差(即小车偏离磁条轨道)在该控制器的作用下效果最明显,纠偏迅速,满足设计要求。
5 结束语
对磁导航小车的纠偏模型设计中采用二次线性控制器可以对位置偏差有快速的收敛纠正作用,具有良好的控制性能。
参考文献
[1]戴浩君,王晓晨. LQR 优化下的对智能轨道车辆PID控制仿真[J].齐齐哈尔大学学报(自然科学版),2018,34(02):14-20.
[2]杨前明,王晓媛,王伟,等. 复合轮式机器人运动控制数学建模与实验研究[J]. 组合机床与自动化加工技术,2016(11):96-99,104.
[3]吴世杰.基于轨迹纠偏的双驱动单元AGV建模仿真及实验研究.2020.6
作者简介:李金龙,男,甘肃永靖,1980.10,副教授,甘肃机电职业技术学院
石瑞芳,女,1982.01,讲师,甘肃天水,甘肃机电职业技术学院
(本论文来源于甘肃机电职业技术学院校级科研项目《基于S7-1200PLC的磁导航自动导引运输车纠偏控制方法研究》,项目编号GSJD2020A07)
