基于多传感器融合SLAM应用的室内清洁机器人研究
2022-05-15张胜男


基金项目:湖北省教育厅科学技术研究计划项目(指导性项目)“基于多传感器融合技术的室内移动机器人SLAM算法应用研究”(B2018322)。
作者简介:张胜男(1980-),女,工程师,讲师,主要从事自动控制系统研究。
摘 要:随着人们对家居环境要求的不断提高,清洁时间却不断减少,自动清洁机器人的需求尤为广泛。本文中清洁机器人通过多传感器融合的SLAM技术先对周围环境进行辨识的同时进行地图构建,自动规划大概的路径;后续在已规划的路径中可自动避障行走,且在工作过程中可自動检测电量,若电量低于临界值则终端寻找预设好目标位置的充电桩进行对接充电,电量充满后继续运行被中断的程序。
关键词:室内清洁机器人;多传感器融合;SLAM
中图分类号:TB 文献标识码:A doi:10.19311/j.cnki.1672-3198.2022.12.089
0 引言
智能机器人拥有多种传感器来感知周围环境,还需要进行环境建模与目标识别、任务规划、运动控制等复杂的功能。因此,高度智能化机器人需要多模块相互协作来完成任务。
1 机器人任务规划
室内清洁机器人的任务主要有三个:路径规划、自动避障和自动充电。其中,路径规划和自动避障都属于运动导航。
路径规划是根据清扫区域合理规划运行路线。完成此任务必须先通过传感器获取周围环境信息,分析处理后获得一个能顺利通过并且能全区域覆盖运行的路线;此外还需要在完成清扫任务后能够自动回到起始点或充电桩,或者在任务过程中因电量低规划对接充电桩的路径,并且在充电完成后驶回中断位置。自动避障是实现路径规划、按路径完成清洁作业,以及处理作业过程中一切突发状况确保作业顺利的最核心的功能。该功能依赖外设传感器获取环境信息,系统进行处理后修改当前路径方向以达到避开障碍物的功能。
自动充电功能是清扫机器人智能化的一个基本体现,是电源技术、信号对接技术等功能的结合运用。机器人作业过程中,当电量低于临界值时能够自主寻找充电桩进行充电。
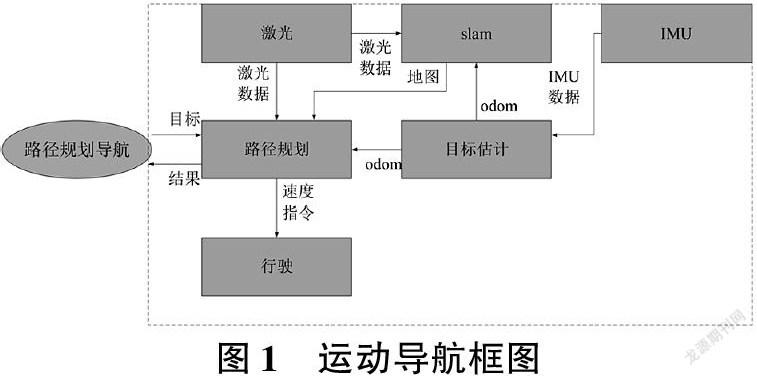
2 运动导航
室内自动清扫机器人通过传感器信息来分析环境特征,确定路标,作为运动的参照进行定位,与此同时完成地图构建;地图构建就是确定路标或环境特征的绝对位置。定位与地图构建互为条件,同步进行。SLAM归纳起来就是一个“感知一估计一校正”的过程,主要包括三个迭代步骤:(1)机器人根据当前的位、姿估计与地图信息对下一步的位、姿和路标(特征)位置进行预测。(2)在下一步中通过传感器观测环境中的路标(特征)。(3)利用观测信息校正上一步预测的定位与地图构建结果。
上述步骤循环迭代进行,过程中机器人完成对自身位、姿和路标(特征)位置的准确估计,并以增量的方式完成地图创建。现有的SLAM研究方法包括四类,分别是基于扩展的卡尔曼滤波器的(EKFF)方法、基于粒子滤波器(Particle Filter-PF)的方法、期望最大化方法(Expectation Maximization.EM)和增量方法。本项目采用基于PF的GMAPPING算法进行优化。
在机器人作业过程中,只采用单一传感器无法确保信息的准确性和可靠性,需要采用多个传感器实现机器人与环境信息的尽可能充分匹配,便于机器人做出正确的决策。算法上采用多传感器信息融合技术将分布在不同位置、不同种类的传感器所提供的局部环境的不完整信息加以分析,利用冗余性和互补性将数据合成,实现多传感器数据关联,消除多传感器之间可能存在的冗余和矛盾,降低定位和地图构建的不确定性,获得机器人在工作空间中的位置、方向和环境信息,从而提高建立环境模型的鲁棒性,以及系统的可靠性。
在通常的SLAM算法中,观测量要与系统状态变量匹配,以确定不断更新的目标。成功的数据关联涉及正确的观测与相应的状态变量匹配,探测和排除虚假观测以及初始化新的轨迹。项目采用基于更新序列和预测协方差矩阵的并行集中式多传感器数据关联结构实现。
项目应用IMU初始化系统的位姿,采用EKF对非线性系统的动态模型进行线性滤波;并结合对激光雷达扫描点区域的合理划分进行构图,可以很好地解决地标的深度特征和回环检测的问题,有效提高地图构建质量和速度。
激光雷达采用HC-SR04系列,3cm到90cm的测量范围基本上可以满足在室内机器人的需求。远距离误差较大(1cm-2cm),近距离误差较小,而且可以根据不同的模块不同的需求在一定范围内作一定的修正。HC-SR04主要参数:工作电压:+5V;静态电流:<2mA;感应角度:<15°;探测距离:2cm-450cm;分辨率:0.3cm。超声波模块在本设计中作为避障和路径规划的主要传感器模块,工作环境在室内,对远距离没有太大要求。
3 自动充电
电源模块由充电桩和车载电池组构成,基于系统的简洁性选用接触式充电。充电桩电源电路先将220V交流电整流成12V直流电,通过线性稳压和滤波过后,由开关电源芯片进行降压,从而可以恒压恒流为车载电池组充电。车载电池组由电池组、降压电路和电量监测电路组成。电池组选用3节18650锂电池串联,其配套保护板可以在过欠等状况下很好地保护电池。
模块中经LM7812稳压过后的+12V电源提供给步进电机工作用电,LM7805稳压得到+5V电源提供给单片机、OLED、超声波等模块的工作电源。
充电桩模块主要实现一个DC220V的市电转换为可以提供车载电池充电的恒压恒流电源。电路中使用为安规电容。安规电容的特点是在断电以后,电荷不会保留一段时间再消失。所以系统断电时不会对接触的人造成电击,保证室内使用者和维修人员的安全。采用全桥整流器和线性稳压芯片LM7815保持输出电压恒定为15V,防止输入电压、负载、环境温度、电路参数等发生变化时,不会对DC-DC电源芯片造成冲击导致其损坏。15V的直流电压通过DC-DC电路给3节18650锂电池(+12V)充电提供恒流恒压电源。
这是一个基于MC34063电源芯片的经典运用电路,应用比较广泛极性反转效率最高65%,升压效率最高90%,降压效率最高80%,变换效率和工作频率滤波电容等成正比。其中R1为限流电阻,决定输出点电流。U2为电源芯片。C4為定时电容,决定内部工作频率。D2为快速开关二极管。D3作为输出电压指示灯指示工作状态。主要外围元件标称含义和它们取值的计算公式如下:
Vout(输出电压)=1.25V(1+R4/R2)
C4=0.000004*工作频率
R1=0.33/IPK
此外,在充电桩中本文设计了一个红外调制模块,其中使用了STC15F104W单片机,需要提供+5V的电压。采用LM7805稳压芯片,使单片机能获得一个稳定的工作电压。
4 电量检测
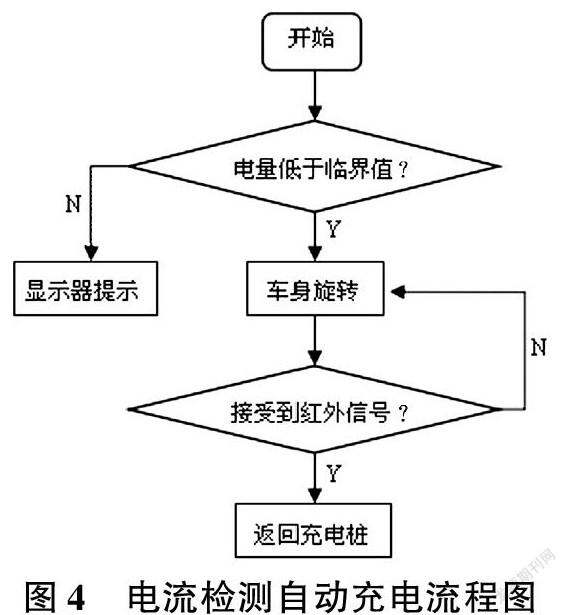
为了满足系统的供电要求,选用了3节18650锂电池作为电源。本模块电路为AD采样电路,目的为了检测电池电量。单节18650的充电截至电压为4.2V,放电终止电压为2.75V。因此,本模块充电截至电压设置为12.6V以及放电中止电压为8.25V。内部算法处理电压与电池电量关系后将电量百分比显示在屏幕上。在获取到机器自身或外界信息时,通过对主单片机的编程利用单片机的中断功能,来执行寻找充电桩或自动路径规划的运行轨迹。因此,本设计中有两个重要的中断。
电量低中断流程图如图4。在该中断程序中触发条件为AD功能采集的电压信号低于临界值。在主程序中一直有监测电量,当电量低于预设临界值时,程序跳出原执行程序,即清扫路径规划程序,然后红外接收模块开始工作,与此同时车身开始原地旋转,当接收模块接收到可靠的来自充电桩红外信号时,停止旋转,直行驶向充电桩。充电完成后,重新回到清扫路径规划的程序中运行。
5 实验与分析
项目实验依托HUSKY的轮式移动小车,在开源ROS平台进行多传感器融合SLAM算法测试并改进,实现了提高移动机器人SLAM算法的实时性和鲁棒性。并结合自动充电技术,完成自动清扫机器人的作业模拟,验证了设计的合理性。
参考文献
[1]袁茂鸿,王姝,林心如,等.基于超声波传感器的扫地机器人避障技术研究[J].南方农机,2021,52(10):100-101.
[2]徐胜华.基于STM32的智能扫地机器人研究与设计[D].南宁:广西师范大学,2016.
[3]汪洋.扫地机器人定位算法设计与嵌入式系统实现[D].合肥:中国科学技术大学,2016.
