地铁车辆常用制动和停放制动防叠加功能研究
2022-05-14陈旭
陈 旭
(克诺尔车辆设备(苏州)有限公司 销售系统部,江苏苏州 215151)
停放制动是防止列车在静止状态下发生溜逸的一种制动方式,根据铁路标准规定,其制动力应仅通过机械方式产生并施加。目前,国内的地铁车辆上广泛采用制动缸与停放制动缸一体化结构的制动单元方式,通过弹簧储能式停放制动缸来实现停放制动力的输出[1-3]。而文献[4]则提出列车需要半数的单元制动缸带有停放制动装置才能满足“在线路最大坡度、最大载荷的情况下施加停放制动的列车不会发生溜逸”的条件。当车辆静止施加停放制动时,通过排空停放制动缸内的压缩空气,停放制动弹簧推动活塞施加停放制动;当需要缓解停放制动时,则向停放缸内充入压缩空气。
1 防叠加方案
一体化结构的制动单元方式为了更好地使用停放制动功能,防止可能产生力的叠加而对制动部件带来的影响,提出2种解决方案:一是在制动单元内部加装双向阀;二是在管路中加装双向阀。文献[5]则介绍了2种在管路中加装阀的停放制动的控制方式:一是通过双脉冲电磁阀和双向阀的组合来控制停放制动和常用制动间的混合施加;二是通过停放制动电磁阀来实现。
1.1 制动单元防叠加
对于早期部分A型地铁项目,在带停放功能的踏面制动单元上设置了双向阀,该双向阀的原理如图1所示,具有常用制动与停放制动防叠加功能,此时空气管路系统无需再设置防叠加双向阀。但该产品已经处于被更新替换状态,也就是在新项目上不再采用。对于大部分的踏面制动单元及新设计的踏面制动单元,结构设计上已经没有防叠加功能,因此空气管路系统中仍需要采用防叠加设置。
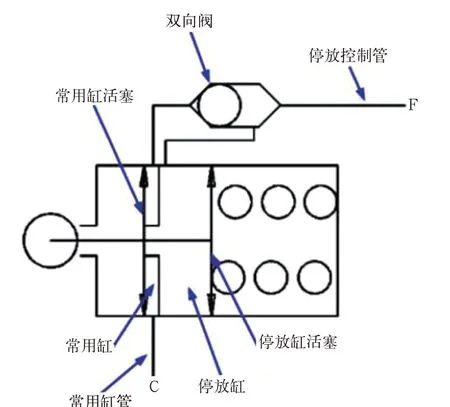
图1 踏面制动单元设置双向阀
1.2 制动管路防叠加
除了基础制动单元中自带防叠加功能外,还可以在制动系统管路中添加控制阀实现防叠加功能。通过对管路中添加阀的方案进行深入分析,介绍停放制动和常用制动防叠加的原理。地铁车辆基础制动装置配置如图2所示,也就是每轴2个制动执行器,其中1个制动执行器仅具有空气制动功能(1和2部件),另1个制动执行器除空气制动外还具备机械停放制动功能(3和4部件)和手动缓解装置(8和9部件)。
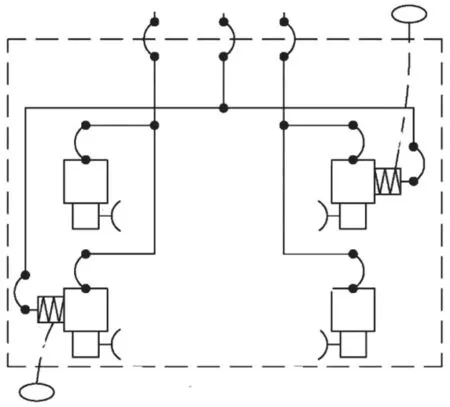
图2 制动单元配置方式
考虑到每个制动执行器最大可承受制动力限制(对于地铁踏面制动单元来说,通常最大不超过40 kN推力)。因此,在空气制动系统设计时需要考虑如何避免空气制动力与停放制动力同时施加在同一个制动执行器上,这就是空气制动与停放制动的防叠加。
在实现上述目的的具体方案上,通常在空气制动管路与停放制动管路间采取相应配置而实现,如图3所示,双向阀3个端口分别连接到不同的管路中。端口1连接到停放制动管(即图2中的管路5处),该管路直接与转向架基础制动装置的停放缸气路接口连接;端口2连接到停放控制管路,该管路将来自总风管的压缩空气通过停放控制电磁阀(双脉冲电磁阀)接入双向阀;端口3连接到空气制动管路中(即图2中的管路6或者7处),图3中的管路6或者7处空气制动力来自于制动控制单元。
2 防叠加原理分析
从图3中可以明显看出,制动部件3和4连接2部分气路,即常用空气制动管路和停放制动管路,以此为例具体分析空气制动和停放制动的防叠加原理,分2种情况分析。
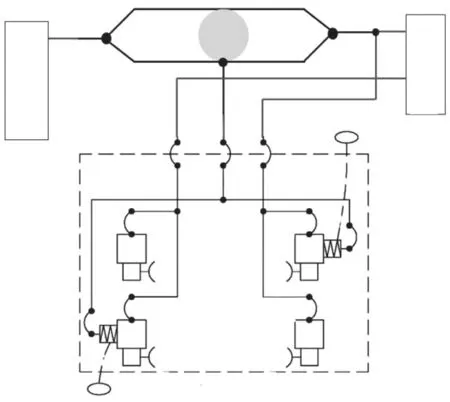
图3 双向阀控制方式防叠加
2.1 先停放后常用
当先施加停放制动,后施加空气制动时,停放缸内的压缩空气变化如图4所示:其中绿色线为常用制动施加前的停放缸内压缩空气压力;紫色线为踏面制动单元停放制动最小缓解压力,当停放缸内的压缩空气低于此压力值时,停放制动开始施加(具体输出力与当时停放缸内的压力有关);红色线为常用制动施加后,停放缸内的压力。
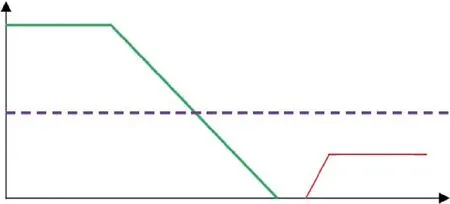
图4 停放缸和常用缸内气压变化
先施加停放制动,再施加常用制动。此时管路6和7中没有压缩空气,双向阀阀芯在3端口,按下停放制动按钮后,部件3和4中停放制动缸内的压缩空气通过管路5经过双向阀的1和2,在双脉冲电磁阀处排入到大气中,此时停放控制处于施加状态(也就是基础制动装置停放缸内的压缩空气已经通过停放控制电磁阀排大气);再施加常用制动时,由于此时常用制动缸内有压缩空气,则双向阀的阀芯被压缩空气推到2处,双向阀的1和3端口接通,则常用制动缸管内的压缩空气将通过双向阀进入停放缸,但是停放缸内的压力并不足以缓解停放制动,因此此时常用制动的制动力小于停放的弹簧力,常用制动并没有施加到部件上。防止了两者叠加共同作用在制动部件上。
2.2 先常用后停放
当先施加空气制动,后施加停放制动时,制动缸内的压缩空气变化如图5所示:其中绿色线为停放缸内压缩空气压力;紫色线为踏面制动单元停放制动最小缓解压力,当停放缸内的压缩空气低于此压力值时,停放制动开始施加(具体输出力与当时停放缸内的压力有关);红色线为常用制动缸管压力。
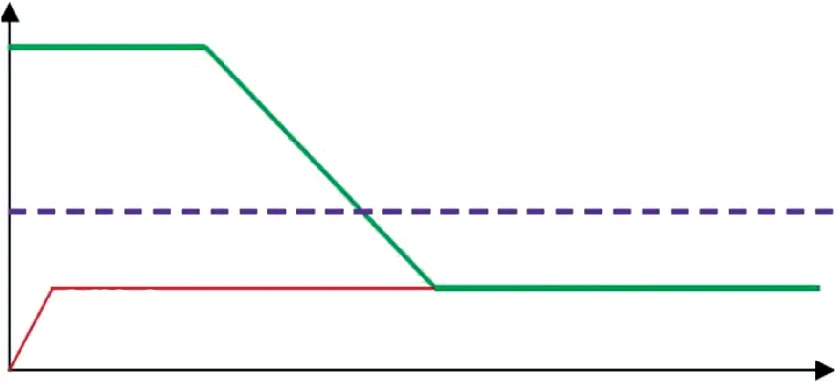
图5 停放缸和常用缸内气压变化
先施加空气制动,后施加停放制动,在没有按下空气制动按钮前,双向阀端口3处的压力为0,小于端口2处的压力。施加空气制动后,端口3有一定的压力,但是依然低于端口2,双向阀依然是端口1和2通路;再施加停放制动后,则停放缸内的压力通过双向阀1和2经过双脉冲电磁阀排入到大气。当停放缸管内(管路5)的压缩空气略低于常用缸管内(连接到端口3)的压缩空气时,双向阀内部进行通路切换,将原先停放缸管与停放电磁阀(双脉冲电磁阀)间的通路切断,同时将停放缸管与常用制动缸管间的通路开通(端口1和3通路)。此时停放制动缸内的压缩空气并没有完全排空,即常用制动先施加,停放制动只能施加部分的压力,避免停放制动完全施加在制动部件上,造成施加在制动部件上压力过大。
3 其他防叠加方案
上述防叠加功能采用了双向阀结构,其特点是停放控制电磁阀或者双脉冲电磁阀的排气口通大气,也就是当施加停放制动时,停放缸内的压缩空气是可以通过该停放电磁阀直接排入大气。当然在施加空气制动(常用制动及紧急制动)时,常用制动缸管内的压缩空气会通过双向阀再次充入停放缸内。
另外,较多地铁项目还采用防叠加方案[5]如图6所示。相对于前面所述的方案,此方案并没有双向阀。双向阀的选择功能被图6所示的气路连接替代。停放电磁阀B09具有2位三通阀功能,在停放缓解状态下,A1~A3通路相通;当施加停放制动时,A2~A3通路相通。因此,停放施加时,通路A 2~A 3自动实现了双向阀通路选择功能。
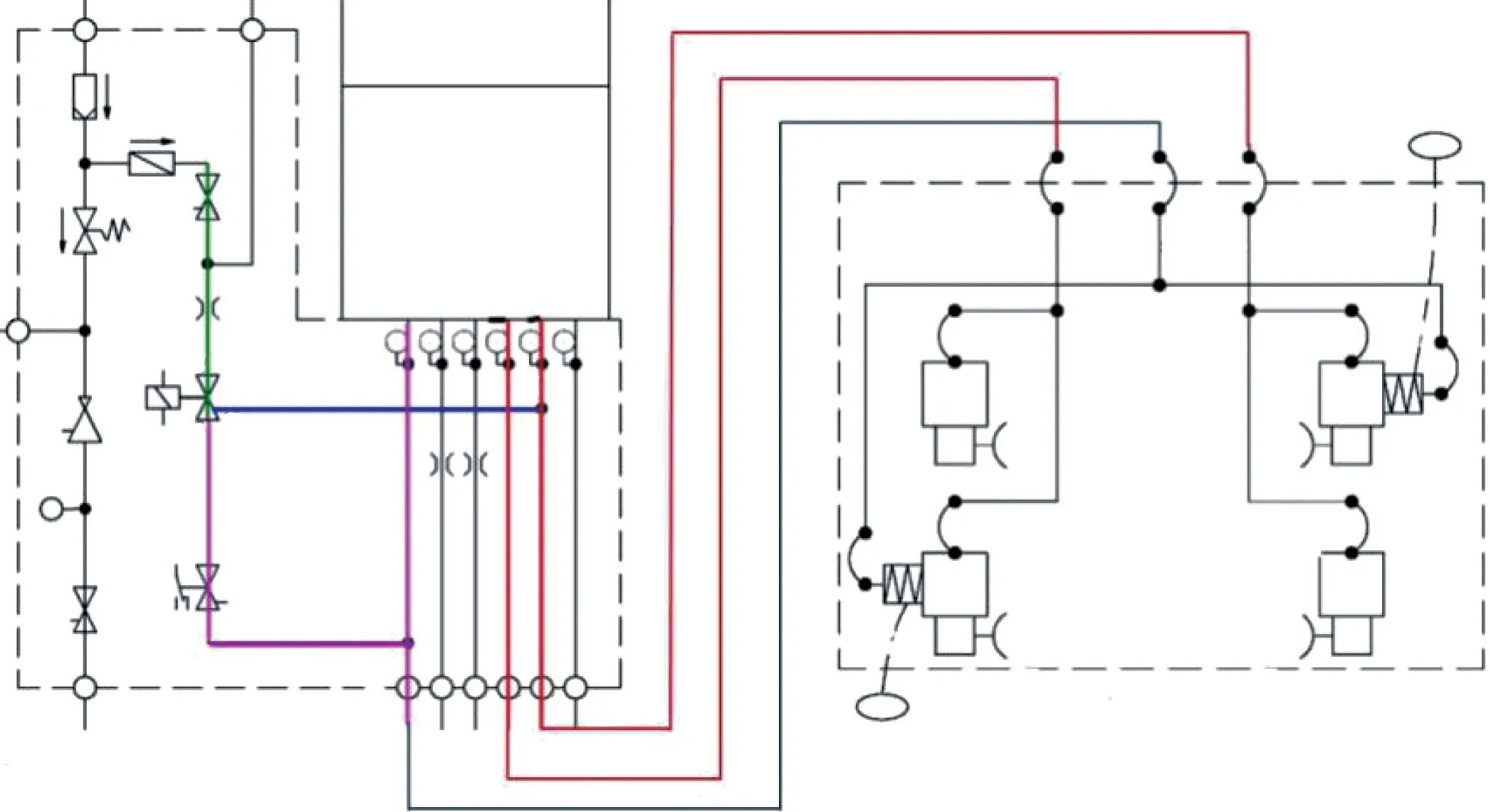
图6 停放电磁阀控制防叠加
当施加停放制动时该车空气制动没有施加,也就是常用缸管6和7端口通过SMART-VALVE端口2和3通大气。此时施加停放制动,则停放缸管内的压缩空气将通过管路5进入SMARTVALVE阀的端口6,再经过停放控制电磁阀(如图6中B09)的A2口再通向SMART-VALVE端口3,由于此时该车空气制动处于缓解状态,因此,进入该车SMART-VALVE端口3的压缩空气也将被排大气,从而实现停放制动完全施加的功能。
当施加停放制动时,该车的空气制动已经施加。则此时如果再施加停放制动,停放缸管内的压缩空气仍通过停放控制电磁阀(如图6中B09)A2口通向SMART-VALVE端口3,因为停放缸压力大于此时常用制动管目标压力值,因此,此时充入端口3通过管路6进入常用缸管内的多余压缩空气将被SMART-VALVE控制排出,直至停放缸管与常用缸管内的压缩空气压力相同(即B09端口2和3压力相同)。此时停放制动也没有完全施加上,和上述双脉冲电磁阀控制的防叠加方案一致。
上述2种方案实现了常用制动与停放制动的防叠加(仅是对带有停放缸的踏面制动或者盘型制动单元而言),对于不带停放制动功能的制动单元,其常用制动力并没有变化。
4 结论
地铁车辆上的基础制动单元作为列车制动时的重要执行单元,按照其功能配备了常用制动和停放制动2种功能,但是为了不影响制动力的重复施加,保护制动单元,需要为基础制动单元设计防叠加功能。文中基于上述需求,介绍了2种目前地铁车辆上使用的防叠加方法,并对其功能原理进行分析和介绍,以期能够提高车辆设计和运营人员对于停放制动的理解,为推动轨道交通车辆发展提供支撑。