应用门循环神经网络的电力铁塔机器人攀爬速度自动化控制方法
2022-05-12王志钢袁守彬
王志钢,姚 强,袁守彬
(1.国网吉林省电力有限公司设备部,长春 130000;2.国网延边供电公司运维检修部,延吉 136200)
0 引言
电力为各行各样运营提供了基础能源,因此保证电力持续供应是电力公司最主要的业务。电力从发电到最后的配电,需要经历多个环节才能到达用户端。在电力输送过程中,输电线路、电力铁塔是必不可少的组成部分。其中,后者主要为了实现后者高空架设而存在。由此可知,电力铁塔在电力输送中发挥了重要作用。电力铁塔常常布设在环境恶劣的野外,受到自然环境的影响,铁塔本身及其所携带的各种设备很容易出现遭受到损坏。面对这种情况,电力公司会定期进行检修工作[1]。以往安全检修需要人工作业,不仅费时费力,效率低,还存在高空坠落的风险以及铁塔携带的高压导致的触电的危险。针对这种情况,电力铁塔机器人被发明出来并被广泛应用,逐渐取代或者部分代替人工进行日常巡检作用。
在电力铁塔机器人使用过程中,人们逐渐发现一个问题,即攀爬速度难以控制。速度过快,电力铁塔机器人容易失去稳定性,降低抓取牢固性,导致机器人从高空掉落下来;速度过慢,则降低巡检效率。目前,关于机器人的控制方法主要滑模控制、鲁棒控制、PID控制等三种。其中,滑模控制缺点是容易受到机器人运动过程中的高频抖振效应影响,控制准确性低;鲁棒控制控制缺点是适应性不强,一旦确定控制参数吗,就不容易调整。PID控制的缺点是控制精度不高.并且过于依赖于专家经验。
针对以往控制方法的存在的缺点,应用门循环神经网络提出一种新的电力铁塔机器人攀爬速度自动化控制方法。通过该方法以期提高电力铁塔机器人攀爬稳定性和安全性。
1 电力铁塔机器人攀爬速度自动化控制方法研究
为有效均衡电力铁塔机器人攀爬速度,提出一种基于门循环神经网络的控制方法。方法主要分为三部分,即电力铁塔机器人预期攀爬速度求取、电力铁塔机器人实际攀爬速度参数采集、电力铁塔机器人攀爬速度自动化控制实现。下面针对这三个部分进行具体分析。
1.1 基于门循环神经网络的机器人预期攀爬速度求取
电力铁塔机器人攀爬速度的自动化控制的目的是让机器人运动速度能与预期理想速度的保持一致[2]。当攀爬速度超过预期理想值时,控制机器人减缓攀爬速度,靠近预期理想值,当攀爬速度低于预期理想值时,控制机器人提高攀爬速度,靠近预期理想值。基于上述描述,确定电力铁塔机器人预期攀爬速度是关键。在这里主要分为电力铁塔机器人攀爬速度影响因素确定以及预期攀爬速度求取两个步骤。下面进行具体分析。
1)攀爬速度影响因素确定
电力铁塔机器人攀爬速度与影响因素之间存在很强的线性关系,即影响因素为自变量,攀爬速度为因变量,后者随着前者的改变而改变[3]。由此可知,通过已知自变量参数,在构建的预测模型下是可以实现预期攀爬速度预测的。而在预测之前,明确影响因素至关重要。在这里通过计算自变量与因变量之间皮尔森相关系数来确定。相关系数计算如式(1)所示:

式中,P(X,Y)代表皮尔森相关系数;X代表自变量(攀爬速度影响因素);Y代表因变量(攀爬速度);cov(X,Y)代表两个变量数组的协方差;SX代表自变量数组的标准差;SY代表因变量数组的标准差;E代表期望。
皮尔森相关系数取值都在-1.0~1.0之间。根据系数值的不同,划分不同相关类型,如表1所示。
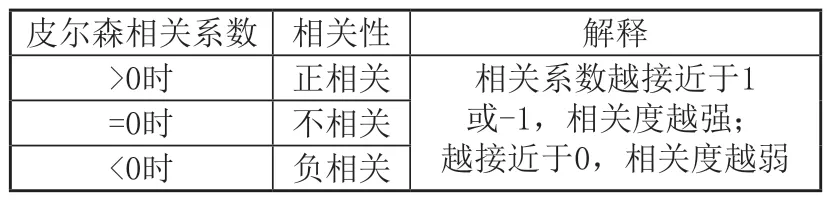
表1 皮尔森相关系数取值含义表
通过皮尔森相关系数选出与电力铁塔机器人攀爬速度最为相关的若干个影响因素,如表2所示。

表2 电力铁塔机器人攀爬速度影响因素
2)预期攀爬速度求取
以选出的9个影响因素为输入,通过门循环神经网络求取预期理想攀爬速度。门循环神经网络是深度学习模型中的一种。与其他深度学习模型相比,该模型收敛速度更快,且更容易进行训练[4]。门循环神经网络结构如图1所示。

图1 门循环神经网络结构
从图1中可以看出更新门和重置门是关键,其计算公式如下所示:

式(3)、式(4)中,zt代表更新门;rt代表重置门;xt代表t时刻的输入值;wxz、wxr分别代表更新门、重置门的权重;σ代表Sigmoid函数;ht-1代表t-1时刻隐含状态的输入;fz、fr分别代表更新门、重置门的偏移参数。ϑlz、ϑlr分别代表更新门、重置门的阈值。
最终输出结果可以描述为:

式(5)中,Θ代表Hadamard积;zi代表更新门输出;代表候选隐藏状态。
与一般神经网络一般,在电力铁塔机器人攀爬速度影响因素输入后,经过门循环神经网络进行正向传播,然后进行反向传播,调节权值和阈值,完成门循环神经网络训练。将测试数据输入到训练好的门循环神经网络当中,即可求出预期速度值。
1.2 电力铁塔机器人实际攀爬速度参数采集
最后的电力铁塔机器人攀爬速度控制是通过实际与预期对比误差来实现的,因此在明确预期攀爬速度后,还需要明确电力铁塔机器人实际攀爬速度。在这里主要通过激光测速传感器来采集电力铁塔机器人实际攀爬速度。原理是通过向目标物体发送激光束并接收发射激光束之间的时间差,计算激光测速传感器与电力铁塔机器人之间距离。当电力铁塔机器人移动一段时间后再次进行测距,然后计算前后两个时刻时的移动距离,最后再根据移动时间,得到电力铁塔机器人的运行速度。原理示意图如图2所示。

图2 电力铁塔机器人实际攀爬速度求取原理图
激光测速传感器与电力铁塔机器人之间距离计算如式(6)所示:

式(6)中,L代表距离;v代表激光传播速度;Δt代表激光运行时间差。
由此计算机器人与水平地面的高度,计算如式(7)所示:

式(7)中,H代表电力铁塔机器人与水平地面的高度;S代表激光测速传感器与电力铁塔之间的距离
重复上述过程,计算下一个时间点机器人与水平地面的高度,记为H`。
机器人前后两个时刻的移动距离计算如式(8)所示:

式(8)中,ΔH代表移动距离。
根据移动距离以及移动时间差,计算电力铁塔机器人实际攀爬速度。计算如式(9)所示:

式(9)中,V代表电力铁塔机器人实际攀爬速度;Tt-1-Tt代表电力铁塔机器人移动时间差。
通过激光测速传感器完成了电力铁塔机器人实际攀爬速度的求取。
1.3 电力铁塔机器人攀爬速度自动化控制实现
在已知机器人攀爬工况参数以及实际、预期攀爬速度的基础上,通过模糊PID设计一种控制器,实现电力铁塔机器人攀爬速度自动化控制[5]。该控制器结构如图3所示。
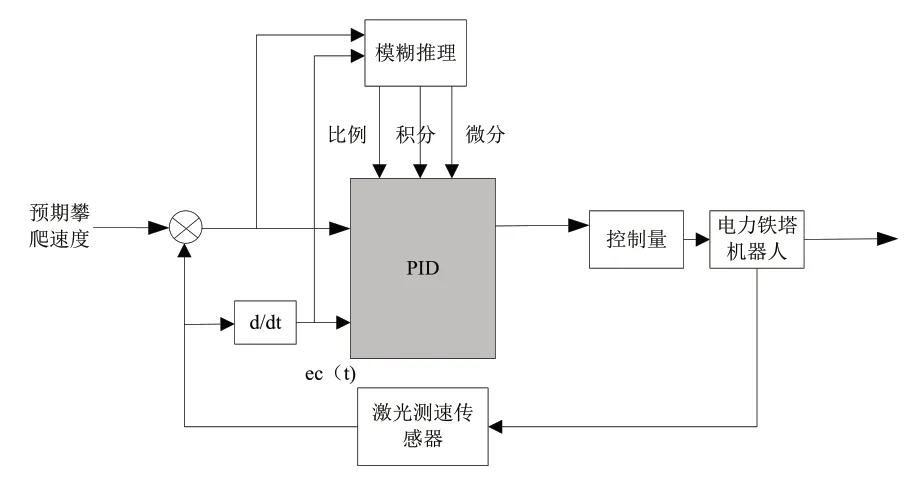
图3 模糊PID控制器组成结构
模糊PID控制器实际是一种综合控制器,主要由两部分组成,即PID控制和模糊控制。
1)PID控制
PID控制,即比例、积分和微分控制。比例、积分和微分是三种运算,通过这三种运算能够计算出电力铁塔机器人攀爬速度的控制量。控制量计算公式如式(10)所示:

其中,

式中,S(t)为机器人攀爬速度控制量;kp为比例系数;Ti为积分时间常数;Td为微分时间常数;e(t)为机器人预期攀爬速度和实际攀爬速度之间的误差;a(t)为预期攀爬速度;β(t)为实际攀爬速度。
2)模糊控制
模糊控制主要由三部分组成,即:
(1)模糊化。将e(t)精确值转化为模糊矢量
(2)模糊推理。通过知识库推理得出模糊控制量。
(3)去模糊化。将模糊控制量转换回精确值。
将PID控制与模糊控制结合在一起,对电力铁塔机器人攀爬速度进行控制。具体过程如下:
步骤1:根据e(t)计算误差变化率,记为ec;
步骤2:让e(t)和ec分别与量化因子相乘,得到E(t)、EC。
步骤3:判断E(t)、EC是否超限,若超限,则将其作为上下限值;否则,将E(t)。EC进行模糊化处理;
步骤4:查找对应的模糊控制表,确定PID三个控制器系数;
步骤5:根据PID三个控制器系数计算对应的三个常数;
步骤6:执行PID计算,根据式(10)得出电力铁塔机器人攀爬速度。
通过模糊PID的不断调整和运算,一直让电力铁塔机器人攀爬速度靠近预期理想值,以此实现控制。
2 算例分析与测试
为确定所研究方法在电力铁塔机器人攀爬速度方面的控制性能,以滑模控制、鲁棒控制、PID控制等三种以往控制方法作为对照组,进行算例分析与测试。
2.1 方法测试环境设计
以郊外某一个“干字形”电力铁塔作为对象,搭建测试环境。该电力铁搭高40米,其上架设的高压线为110kV,人工攀爬检修非常危险。基于此,使用电力铁塔机器人进行巡检。该机器人由两部分组成,即攀爬躯体以及地面控制器两部分,前者固定在电力铁搭躯干上,后者在地面进行速度控制,如图4所示。

图4 方法测试环境示意图
2.2 攀爬速度控制预期方案
在设定的10min攀爬时间前提下,利用门循环神经网络计算电力铁搭机器预期攀爬速度,并绘制成预期速度控制曲线,如图5所示。

图5 电力铁塔机器人攀爬速度预期控制曲线
从图5中可以看出,预期的电力铁塔机器人攀爬速度是在完成开始加速度之后,能够一直保持匀速爬行。
2.3 激光测速传感器选型
选择ZLS-Px激光测速传感器获取电力铁塔机器人实际攀爬速度参数。首先将传感器布置在距离电力铁塔5m处的开阔地区,然后启动设备,向着电力铁塔机器人发射激光,跟踪机器人运动,实时采集攀爬速度。ZLS-Px激光测速传感器工作参数如表3所示。
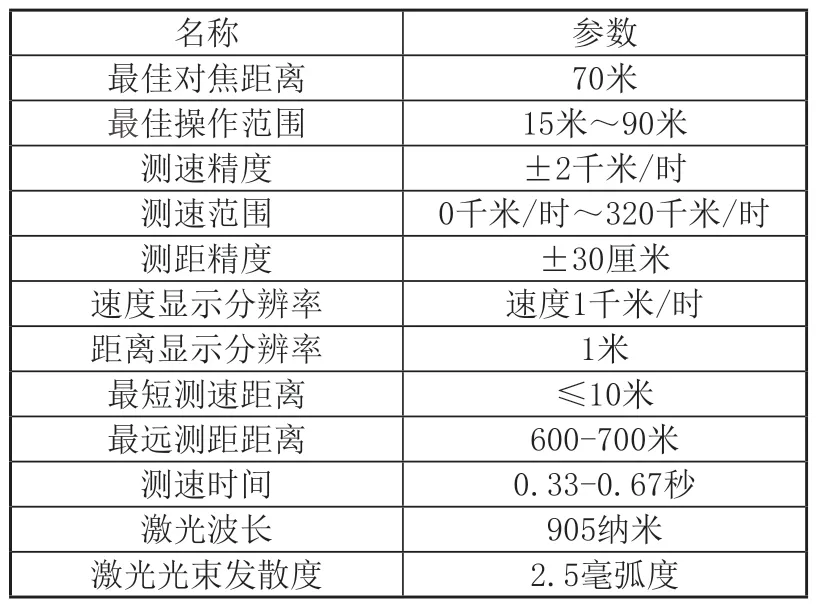
表3 ZLS-Px激光测速传感器工作参数表
2.4 攀爬速度控制结果
在Simulink工具箱中建立四种控制方法的仿真模型,然后对图4测试环境中的机器人进行攀爬速度控制,得出控制结果,并绘制成散点图,如图6所示。
从图6中可以看出,所研究方法、滑模控制方法、鲁棒控制方法、PID控制方法等应用下,机器人攀爬速度控制散点均在预期控制曲线周围上下波动,但是波动程度存在很大的差异,在一定程度上说明这四种方法的控制效果不同。
2.5 方法控制精度分析
为进一步明确不同方法在控制效果方面存在的差异,计算图6电力铁塔机器人实际攀爬速度点与图5预期攀爬速度曲线之间的杰卡德系数,该系数越大,机器人攀爬速度越接近预期,证明方法的控制精度越高。结果如表4所示。
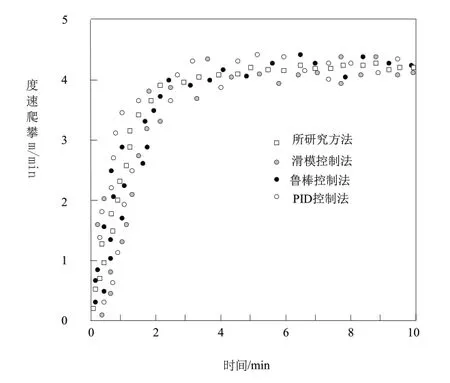
图6 电力铁塔机器人攀爬速度控制散点图

表4 方法的杰卡德系数表
从表4中可以看出,与其他三种控制方法相比,所研究方法应用下,杰卡德系数更大,说明该方法控制下机器人攀爬速度更接近预期,说明该方法的控制精度更高。
3 结语
综上所述,为了能够及时发现电力铁塔故障,提出一种基于门循环神经网络的电力铁塔机器人攀爬速度自动化控制方法。该方法通过门循环神经网络求取机器人预期攀爬速度,然后通过与实际运动参数之间进行误差对比,求取控制参量。最后通过测试,所研究方法的杰卡德系数更大,证明了该方法的控制精度,完成了研究目标。
