应用于化纤长丝自动落卷机的安全防护设计
2022-05-12周春旭刘园园
崔 正,王 勇,蔡 苗,周春旭,刘园园
(1.北京机械工业自动化研究所,北京 100120;2.北自所(北京)科技发展股份有限公司,北京 100120)
0 引言
2020年我国化纤总产量超6000万吨,占世界化纤总产量的70%,是我国具有国际竞争优势的产业。[1]然而我国化纤生产企业的自动化程度较低,化纤行业装备与发达国家相比还有很大差距。化纤纺丝车间的生产环境恶劣,噪音大,工人劳动强度高,落卷自动化已经成为化纤生产作业的必然趋势。北自所研发的悬挂式自动落卷机打破了进口装备的垄断,可完全替代人工落卷作业,能够很好地解决纺丝工人工作强度大,人工落卷降等率高,人为原因导致的产品批号混乱等问题。保证自动落卷机在化纤长丝生产车间复杂的现场环境下高效、安全的工作是首要问题,设计一种适合的自动落卷机的安全防护方法就变得尤为重要。
1 选题依据
长丝纺织车间现场环境如图1所示,生产现场空间小、杂物多、噪声大。现场纺丝工人需要在自动落卷机运行区域上进行添加纸管、处理未能及时落卷的卷装丝饼、进行卷绕头生头等工作。自动落卷机全天不间断在车间中进行落卷作业,垂直工作高度距地面10mm至1900mm,升降速度300mm/s;水平运动范围贯穿整个长丝生产车间,水平速度1200mm/s。现场人员、物品经常处于自动落卷机作业路径上,造成落卷机避让障碍停机且存在极大的安全隐患。为了避免发生安全事故,设计一种自动落卷机的安全防护方法尤为重要。

图1 长丝生产车间环境
因生产现场空间狭小且严重妨碍人工操作,传统的安装防护栏隔离落卷通道和人员的方法并不适用,因此必须为自动落卷机设置主动防护系统。主动安全防护系统需要选用合适的环境检测装置,一般的光电传感器和机械行程开关是一维检测且探测距离短并不适合高速运行的自动落卷机。
本文设计了一种适用于悬挂式自动落卷机的安全防护方法,通过采用激光扫描雷达的二维环境检测防护方法和基于机器视觉的三维环境检测防护方法相结合,为用户提供了一种有效的自主安全解决方案。
2 基于激光扫描的自动落卷机安全防护设计
2.1 激光扫描二维环境检测原理
如图2所示,激光扫描仪根据光的飞行时间测量距离。激光扫描仪会发射激光脉冲,同时会启用激光扫描仪内部电子秒表,如果前方有物体遮挡就会将光脉冲反射回来并被激光扫描仪接收,根据发射和返回激光的时差Δt就可以计算出距离物体的距离[2]。如图3所示,激光扫描仪中还有一面镜子在匀速旋转,可以向设备周围均匀发射激光脉冲,市面上一般的激光扫描设备发射脉冲的角分辨率可以达到0.5°①,测量半径最大为7m,最小分辨率为30mm②。因此激光扫描仪是二维环境检测装置,其具有检测速度快、检测平面范围大的特点,可以作用于自动落卷机的安全防护设计。

图2 激光扫描仪测距原理图

图3 激光扫描仪二维环境检测原理图
2.2 激光安全系统设计
如图4所示,两台激光扫描设备安装在自动落卷机水平运行方向的底部,均为倒置安装,检测高度为150mm,用于检测人体脚踝及地面障碍物。

图4 激光扫描设备的安装位置
为了避免因激光扫描设备设置区域出现问题导致的生产事故,根据国际标准化组织ISO关于激光扫描设备的防护标准计算,规定应用在自动落卷机的激光扫描设备最小保护范围的长度为1442mm;最小保护范围宽度为3000mm。
2.3 激光扫描设备的硬件设置
激光扫描设备用于自动落卷机的环境检测还需要对其进行硬件配置,以便更好的与自动落卷机配合,保障自动落卷的安全、高效。
如图5所示,市面上的激光扫描仪一般都具有多个安全防护区输出接口,工程项目中,为了减少不必要的停车,提高落卷效率,一般设置两个防护区即减速区和停止区。设置减速区不仅避免了自动落卷机因急刹车导致卷装损坏,而且减少了停车次数保证落卷效率。设置停止区保障了在人员突然接近落卷机情况下设备能及时停机。适配自动落卷机的激光扫描设备的参数:减速区域为长度3000mm,宽度左右各1600mm;停止区域设置为长度1500mm,左右宽度各1500mm。

图5 保护区域图示
根据现场环境的不同也可以利用激光扫描设备的部的监控器,根据水平电机行驶速度来动态切换保护区域范围。激光扫描设备有两个动态输入接口,通过连接水平电机减速机的增量式编码器来确定行驶速度机行驶的方向和速度。两个动态输入接口一个连接增量式传感器的0/90°相序输出接口,另一个连接编码器脉冲输出接口。悬挂式自动落卷机水平伺服电机旋转一周增量式编码器发出1000次脉冲,水平行使22mm,即每厘米脉冲为455。配置完成每厘米脉冲和保护区域后,激光扫描设备就可以根据行驶速度来切换保护区,使得自动落卷机的运行更高效可靠。
另外,激光扫描设备需要设置自动复位模式。在因探测到障碍物导致自动落卷机停车情况下,移除障碍物后激光扫描设备能自动将输出正常信号,不需要手动复位从而保障操作工人的安全、减少停机时间。
基于激光扫描的自动落卷机安全防护设计虽然配置和安装简便,但其平面检测仅检测人的脚部会存在盲区,例如当人员在保护区域外弯腰低头时虽然激光扫描设备未检测到危险,但人体已经在危险区域。另外由于纺丝车间现场废丝较多,激光扫描设备容易产生误信号,增加自动落卷机的停车时间,影响落卷效率。使用机器视觉的方法对自动落卷机进行三维的运行环境检测,可以有效避免因视野盲区带来的安全事故,减少误信号的产生,提高自动落卷机的可靠性。
3 基于机器视觉的自动落卷机安全防护设计
3.1 机器视觉系统
机器视觉系统由含有2个相机的视觉模块、高性能工控机、通讯模块组成。自动落卷机运行环境的障碍物主要是人员、丝车、纸管等,为了减少计算量,加快工控机的图像处理速度,使用机器视觉技术对自动落卷机运行环境进行视觉检测时,首先应对图像进行目标检测,减少图片中的像素点。随后进行双目立体视觉计算距离数据,控制自动落卷机减速或紧急停车。本设计使用双目相机中的靠近空地的相机进行目标检测,识别出障碍物的边框和中心点,对中心点进行双目视觉测距。
3.1.1 目标检测
使用基于深度学习的YOLO算法(You Only Look Once)对自动落卷机的运行环境进行目标检测[3],网络结构如图6所示。YOLO将图片数据划分成7×7的网格并对每个网格预测出3个障碍物边框和每个边框的位置信息、置信度,在预测出的7×7×3个边框中去除置信度低于阈值的边框,实现对数据集的训练。
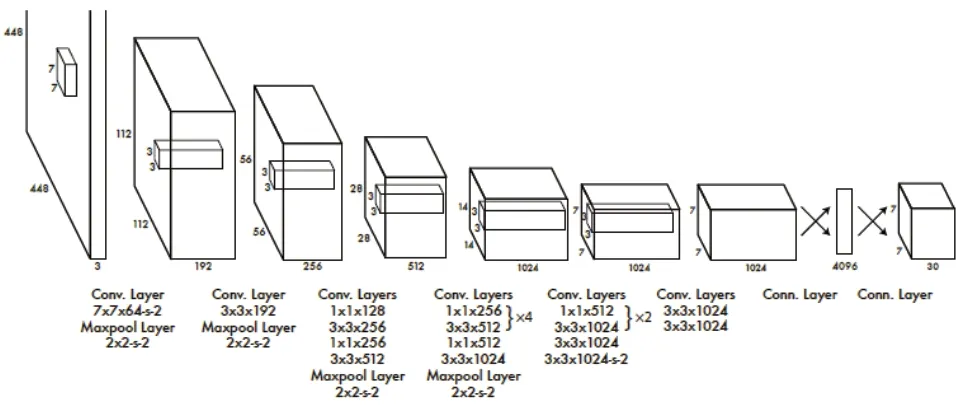
图6 YOLO网络结构
对落卷车间的人员、丝车、纸管等障碍物进行不同角度的图像采集,并标注每张图片中所有障碍物的类别,制作适合深度学习的数据集。将图像数据集输入图6所示的卷积神经网络(CNN)进行训练。50000轮的训练后将算法模型部署到工控机上,使用测试图片验证算法模型的识别准确度。若准确度不足,则改变参数重新进行训练,直至能够准确识别出障碍物,如图7所示。

图7 目标检测效果
YOLO目标检测算法是基于目标回归的检测算法属于一阶检测算法,可以直接对特征值进行提取、分类,实现图像由输入到输出快速检测。该算法处理图像速度最快可达45FPS,具有很好的实时性,可以实现自动落卷机目标检测采样频率高的要求。
3.1.2 双目立体视觉测距
目标检测识别出障碍物类别后,使用双目立体视觉技术对障碍物中心点进行测距。双目立体视觉测距技术是利用物体的在二维平面的投影重构三维物体,两台不同位置角度的高清相机拍摄同一物体,使用三角测量的方法计算空间点对应的两张像素点之间的视差得到实际距离[4]。
如图8所示,左右两台相机对应参数分别用l,r表示,在左右相机成像面C1,Cr上,世界坐标系上任意一点的坐标A(x,y,z)在两台相机的成像点为al(ul,vl),ar(ur,vr),A点为两相机的光心与成像点连线Olal,Orar的交点[5]。

图8 双目立体视觉测距原理
空间点A(x,y,z)在两成像面的投影变换矩阵为Ml,Mr,状态转移关系可得:
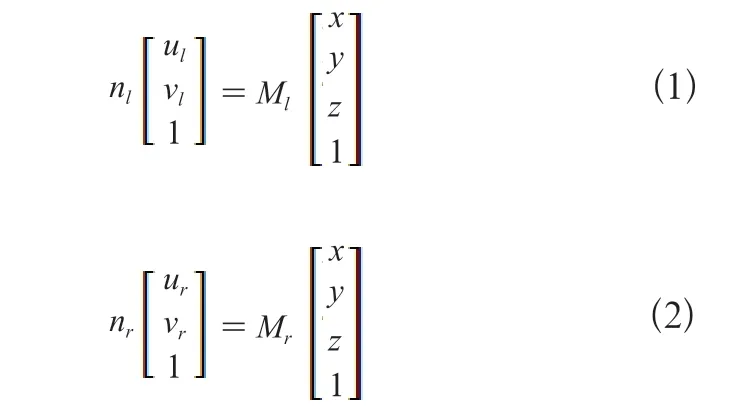
其中,(ul,vl,1)T为al在左成像坐标系下的齐次坐标;(ur,vr,1)T为ar在右成像坐标系下的齐次坐标;(x,y,z,1)T为A点在世界坐标系下的齐次坐标。
变换矩阵Ml,Mr表示为:

将Ml,Mr代入到式(1)、式(2)中,使用最小二乘法解得A矩阵为:
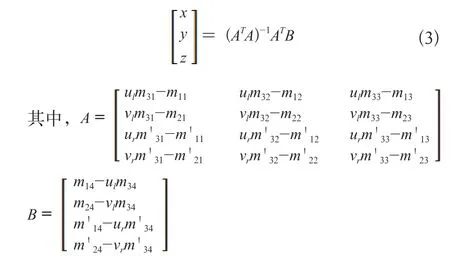
求得A点距世界坐标原点的距离为:

3.1.3 工作流程
如图9所示,环境检测系统与自动落卷机同步工作,视觉模块开机后对视场空间内的物体进行目标检测。若检测到人、丝车、纸管等障碍物,则进行双目视觉测距,否则继续扫描不进行测距。相机对障碍物进行目标检测后,若人或物体距自动落卷机1.5m之外,发给自动落卷机正常工作信号;若距离在1.0~1.5m范围内,则发送减速信号;若距离小于1.0m则发送停车信号。后两种情况记录安全日志,并保存从安全事件发生之前最后一组正常工作状态直到恢复正常状态或停机之间的原始图像数据和三维数据用于安全事故调查和效率统计。
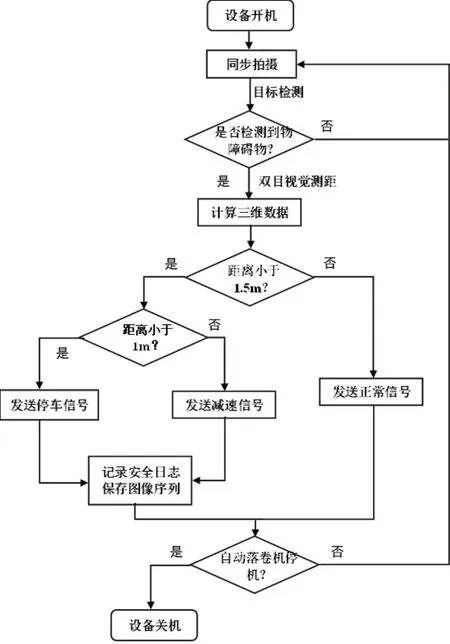
图9 机器视觉环境检测系统工作流程图
3.2 机器视觉安全系统设计
为了全方位保护自动落卷机的安全可靠,在其4个运动方向上均布置双目视觉模块。为保证计算机传输检测结果(即正常行驶、减速、停车信号)的实时性,在算法方面采用多线程编程方式,与自动落筒设备通讯模块采用硬接点通讯。另外系统自身有相机故障检测及报警功能,当视觉系统或相机出现异常时,立即向设备发送停止给信,并发送故障信息代码。
现场纸箱、推车等杂物的高度通常不大于1m,而现场人员的身高在1.5m以上,为了在安装高度有限的情况下检测到靠近自动落卷机的人体、杂物等,相机和镜头组合必须具有足够大的视场角。使用的双目视觉模块其图像宽度方向的视场角约为82.9°,图像高度方向的视场角约为66.5°。
3.2.1 水平运动方向设计
与二维环境检测相同,为保证运行效率,在水平方向上设置2条检测线,1m停车线和1.5m减速线。
侧视视角的安装与视野情况如图10所示,水平方向的双目视觉模块安装在自动落卷机机柜顶部,距地面约2.0m,为调试方便另一侧也安装在同一高度。调整模块使其视野上界与地面平行,此时最近拍摄距离距自动落卷机0.87m,光轴与地面交点水平距离约3m。
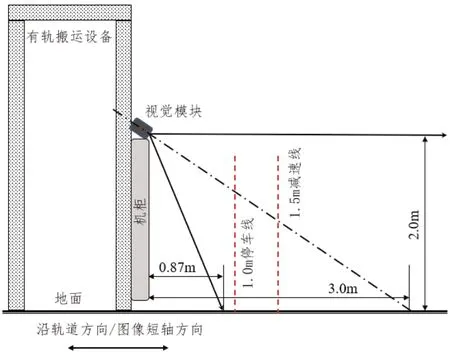
图10 安装与视野范围侧视图
俯视视角的安装与视野情况如图11所示,地面上,最近拍摄距离0.87m处的视野宽度可达3.3m,减少了轨道两侧的检测盲区。2.0m高度位置在近距离位置的视野宽度略小,但前方1.5m处视野宽度已经超过2.0m,基本覆盖两侧安全界线之间的范围。

图11 安装与视野范围俯视图
安装整体工况如图12所示。

图12 水平安装工况展示图
3.2.2 横移作业方向设计
在侧面作业区域进行环境检测主要是因为此区域空间狭小,又有人员交叉作业,容易发生安全事故。自动落卷机在工作时,与卷绕设备之间最小只有100mm的间隙,落卷平台下降的最低位置与地面只有50mm的距离。工人在工作时,会从侧面将身体上半部位会伸出到落卷平台下方,而下半部分还在安全区域内,因此对落卷平台下方的检测尤为重要。
在落卷平台下方双目视觉模块,使其跟随落卷平台一起运动,能够实现对升降平台下方整个空间内的动态检测,确保设备和人员生命安全。双目视觉模块的安装如图13所示。

图13 侧向安装工况展示图
4 自动落卷机PLC适配程序
结合上文与工程经验,为使两种环境检测设备最大程度适配悬挂式自动落卷机,还需要对落卷机PLC进行应用编程。本文设计的两种自动落卷机环境检测方法的输出信号在PLC端均为两个24V常闭输入点,保证了PLC适配程序的通用性。
如图14所示的水平前进方向环境检测设备的PLC适配程序。当有停止信号收入时,自动落卷机停止水平运动和升降运动;当减速信号输入时,设置水平运动速度为300mm/s;当自动落卷机检测到障碍物时,其减速度由正常情况下的300mm/s2变为600mm/s2,减小停车距离。

图14 适配程序
在实际项目中,自动落卷机还装有声光报警设备,在其水平行走和垂直升降时对现场工作人员进行安全提醒,最大限度保障运行安全。自动落卷机的安全防护装置是保障其安全工作的最重要的设备,因此在实际调试时必须先确保安全防护装置和适配程序的正常运行。
5 结语
本文从设计原理、安装方式、硬件配置、工作流程和PLC的适配程序等方面介绍了一种自动落卷机的主动安全防护系统,可以很好的适配自动落卷机的工作环境,保证其在复杂环境下安全、高效地工作。在实际应用中,基于机器视觉的安全防护设计可以有效避免自动落卷机因地面细小杂物而停机的问题,经现场统计其较激光扫描设备可以减少5%的停机时间。但基于激光扫描技术的安全防护设计因其安装调试简单、适应性强、可靠性高的优点目前还不能完全被基于机器视觉的安全防护设计替代,出于安全考虑可作为辅助安全系统进行最后的安全保障。本文的安全防护设计已经稳定应用在北自科技的自动落卷项目中,未来改进后也可用于穿梭车、AGV、堆垛机等物流设备的安全防护。
