水电工程材料分拣仓储装置控制系统设计及仿真
2022-05-11龙真生
龙真生
(广西大学行健文理学院, 电气系, 广西, 南宁 530022)
0 引言
目前国家鼓励进行中小型水电建设,地方为巩固扶贫成果而大力实施小水电建设。但水电工程建设涉及大量零散、种类繁多、数量庞大的工程物资材料分拣仓储及取用需求。这样会导致工人的分拣搬运劳动强度大、效率低下。通过技术研究,找出一套简易可靠实用的分拣仓储装置自动控制和仿真监控系统,提供参考方案。
1 主体设计路径
主体设计路径为基于现实做设计的理论分析,通过MATLAB对控制器进行理论控制性能分析,然后通过NX MCD软件建立实际生产线模型进行虚拟调试来验证控制程序与监控界面。如图1所示。
2 控制单元
2.1 供配电控制单元
KM1、KM2、KM3、KM4继电器由PLC控制,PLC使用独立电源,由PLC控制主/备用电源切换,具体如图2所示。
2.2 电机控制单元
电机手动控制,旋钮转至手动,由3个定值电阻分别接入实现调速,并可由KM6继电器控制电机正/反转,KM5为电机启动总开关,可由就地SB1和触摸屏按钮启动并自锁,停止按钮为SB2,L1与L2中配置电压表,用于监视压降,如图3所示。

图1 主体设计路径
电机自动控制,电机转速由增量型编码器记录并通过Z相输出脉冲,将这些脉冲直接送到PLC,并通过计算可得到当前电机转速,如图4所示。

图2 供配电控制单元

图3 电机手动控制
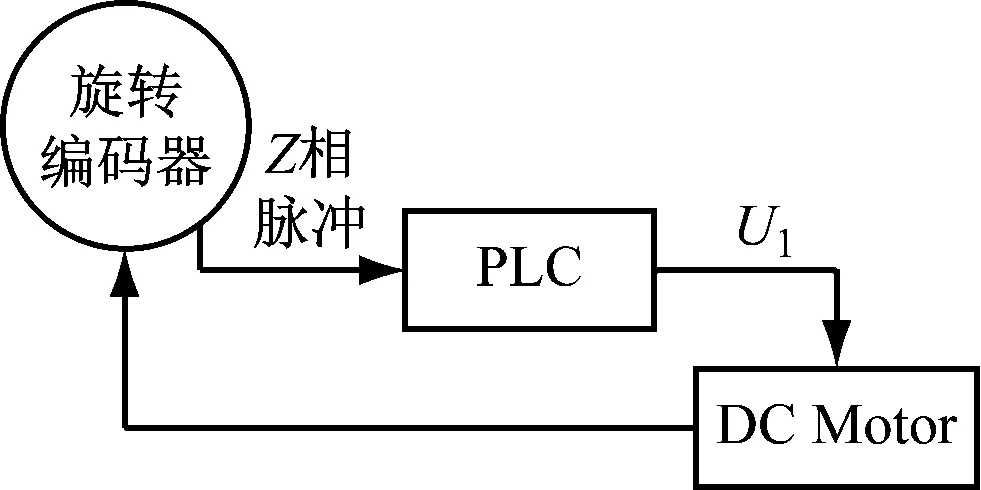
图4 电机自动控制
直流电机与旋转编码器为同轴,旋转编码器输出矩形波脉冲,PLC可根据频率进行编程识别出直流电机转速,最后输出模拟量电压来控制直流电机[1]。
2.3 测重单元控制
在待分拣的传送带末端设计1个测重的压感装置,该装置由1张平面板、1根竖杆、2根液压杆以及4个电极组成,当运动电极与固定电极接触时,输出高电平信号。如图5所示。
2.4 分拣抓手单元控制

图5 测重单元控制

图6 分拣抓手单元控制
3 设备网络组态及编程
PS电源为网络内全部设备进行供电,PLC型号为S7-1200,该CPU为西门子工业控制器中的中端控制器,PC站为工程师站,HMI触摸屏站为就地现场控制站,各类设备使用以太网进行通讯。设备网络组态如图7所示。
3.1 PLC外部接线图
DCM模块为直流电机模块。PLC站使用4个DI拓展模块,4个DQ拓展模块,1个AQ拓展模块。
3.2 PLC程序
背景数据块FB块,是程序中最重要的数据处理分析的函数块,是整个分拣仓储装置控制程序的主要数据分析及逻辑控制块。
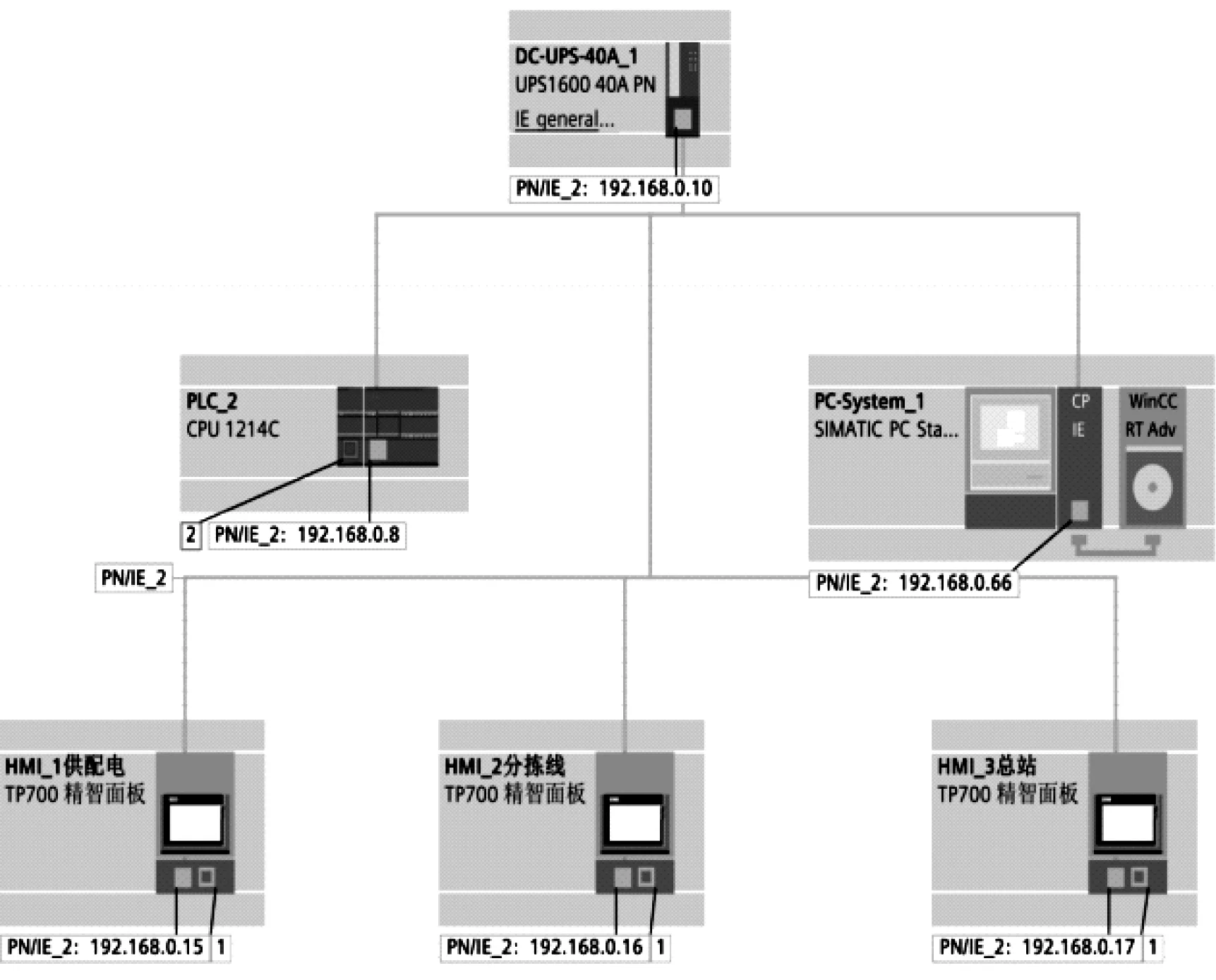
图7 设备网络组态
可编程控制器中Process_center FB块的背景数据块以及程序,如表1和图8所示。
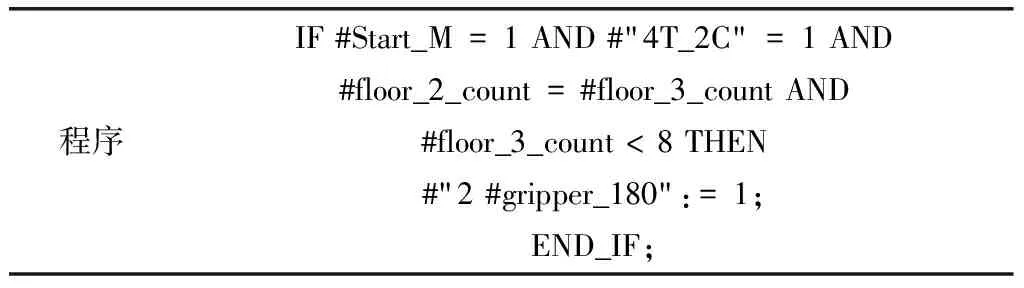
表1 Process_center FB块SCL程序
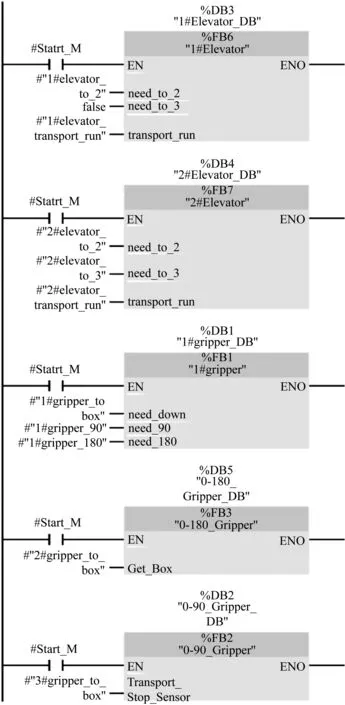
图8 Process_center FB块程序段
总共有1、2号提升机及1、2、3号爪手的FB块。
可编程控制器中负责计算的功能块Arith FB块的背景数据块,该块为增量式PI算法块。
Pulse_Z变量为Z相脉冲变量,#SV为设定值,#PV为测量值,#LI为设定值与测量值的差值,通过配置#K与#LI的乘积来控制#LII值,数据写入#LII变量后再将#LII值赋给#LIII,将#PV值赋给#LPV,然后到下一个1 s脉冲来时,再将#PV的值更新,重新写入#LI,同样的写入#LII,然后通过#LII当前值与上个脉冲写入的#LIII值对比值以及#LII的值进行分析处理,输出控制电压,当#PV的值与#SV的值相等时,#LI的值为0,控制电压不再变化,这时输出电压由#LIII的值控制。
二是复杂的多变性。青年价值观的多变性体现在三个方面:首先,同辈群体对青年价值取向的影响很大。青年往往喜欢和同伴们在价值取向上保持一致,从而忽略了个体的差异性以及价值观念的合理性。其次,青年为了获得他人的认同,乐于追求时髦的事物,有时甚至标新立异,借此来展现自己的与众不同。再次,价值倾向易受到外部因素的影响,但是出于赢得他人认同而违背自身发展利益形成的价值取向必然不会持久。
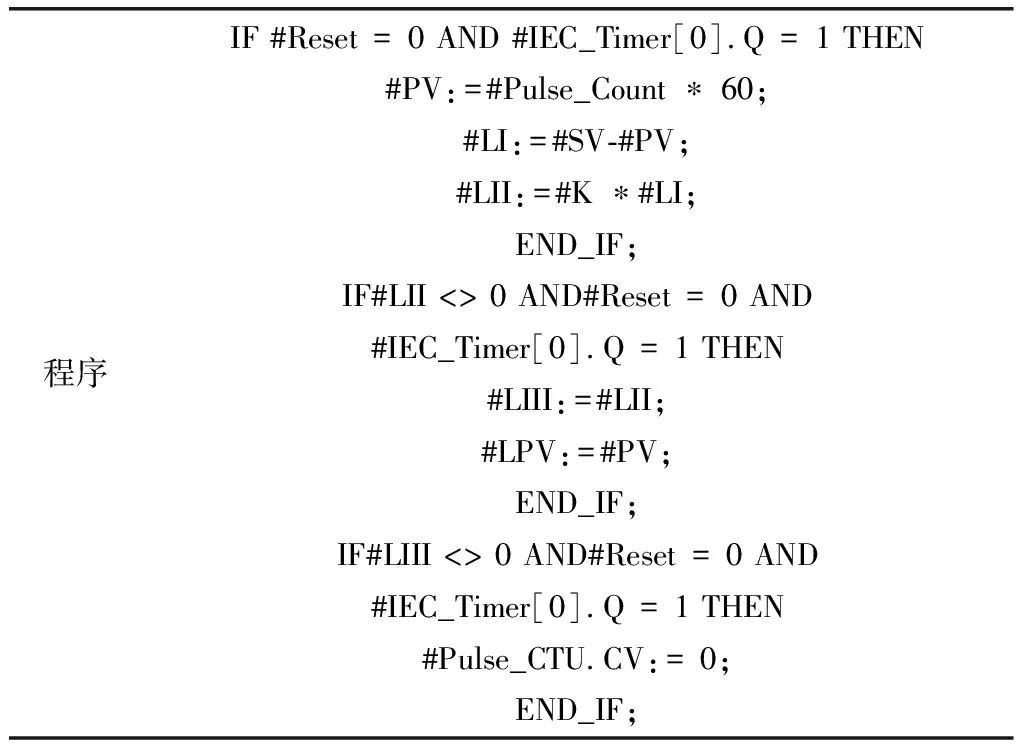
表2 Arith FB块SCL程序
4 直流电机控制
4.1 系统控制电路模型
建立电机电路模型、等效出电阻、电感等部分,如图9所示。

图9 电机电路模型
电机系统的等效方框图为图10,其中,H1为电机的电学部分,H2为电机的力学部分,将2个部分分开讨论,Td与Tm叠加出TE,TE输入到H2,最后输出角速度ω。其中,U1为电机的输入电压,Td为电机所受到的干扰力矩。
在励磁电流If恒定时,电动机电磁转矩Tm和电动机电枢电流i成正比。电动机的反电动势U2与电动机的转速ωn成正比[2]。
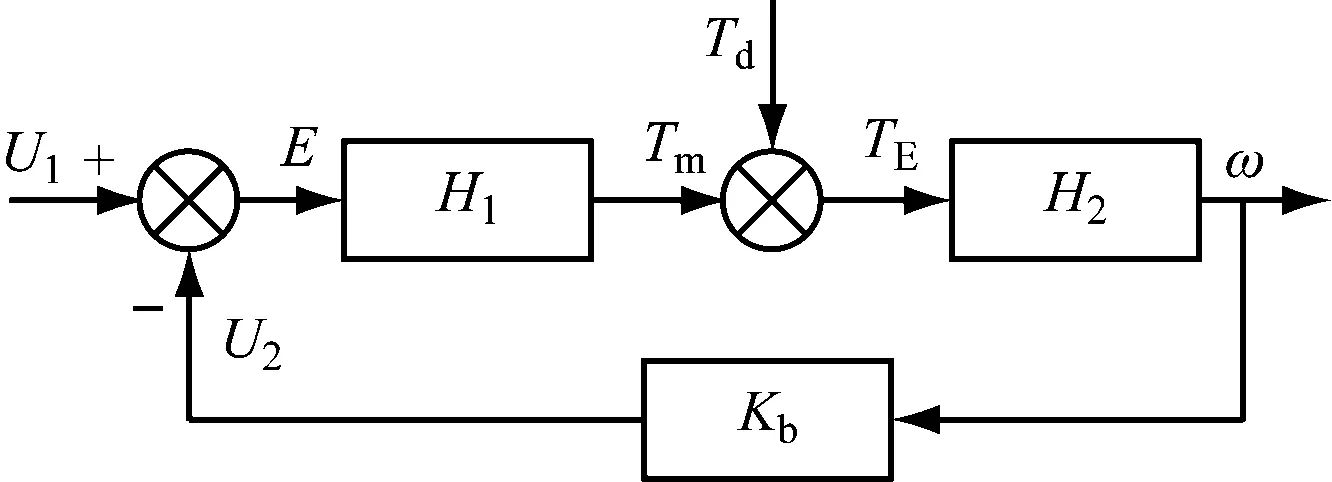
图10 电机自控系统方框图
对于状态空间设计优化的动态控制器,系统模型如图11所示。
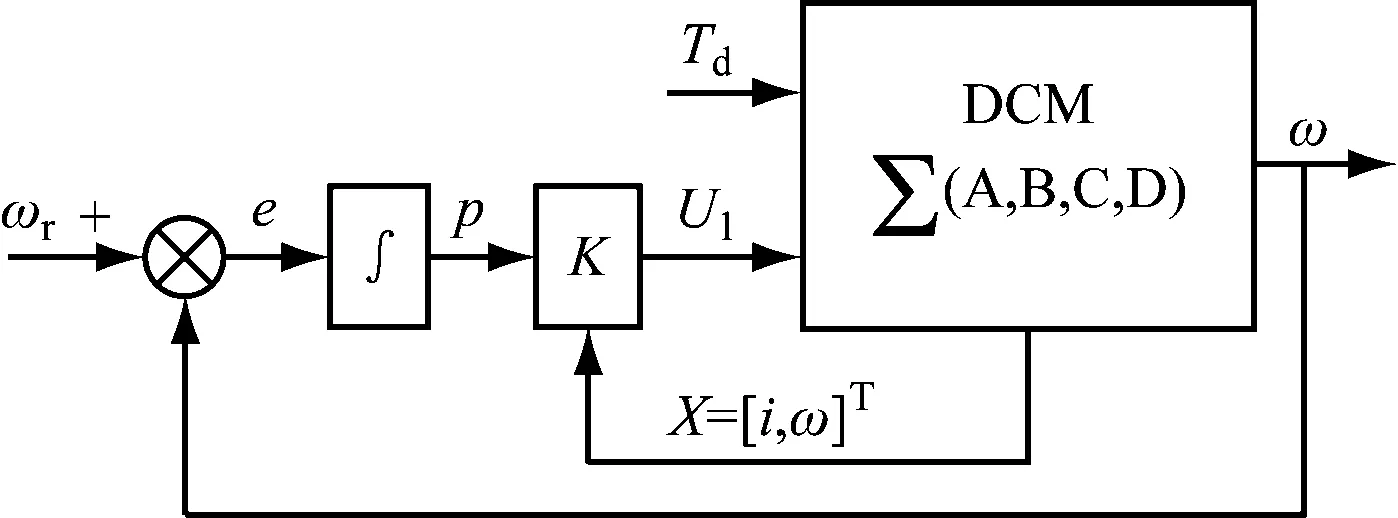
图11 电机引入控制器后的方框图
4.2 MATLAB分析闭环系统
通过分析,在计算出K的基础上,通过分析法与试凑法配置优化反馈增益矩阵K,以获得良好的系统性能;通过计算与二分法分析,取K1=[0.0836 2.0484 -10],此时,具体表达式为图12,可得本系统的数学模型如下:
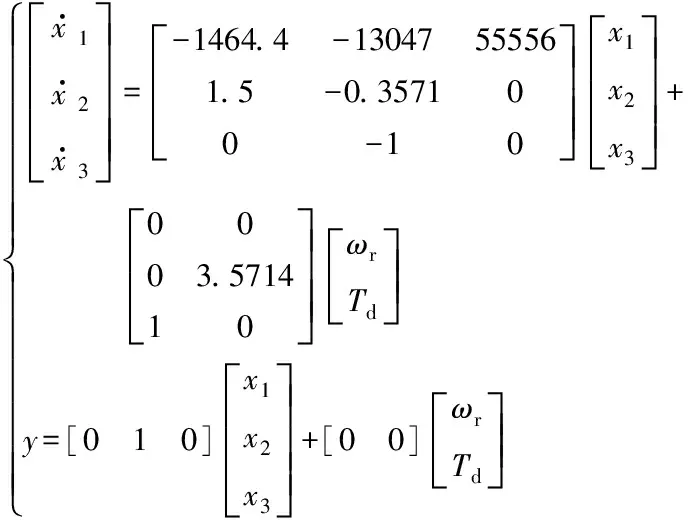
图12 电机系统数学模型
当以ωr作为输入以ω作为输出时,子系统的传递函数如式(1):
(1)
系统的阶跃响应如图13所示。
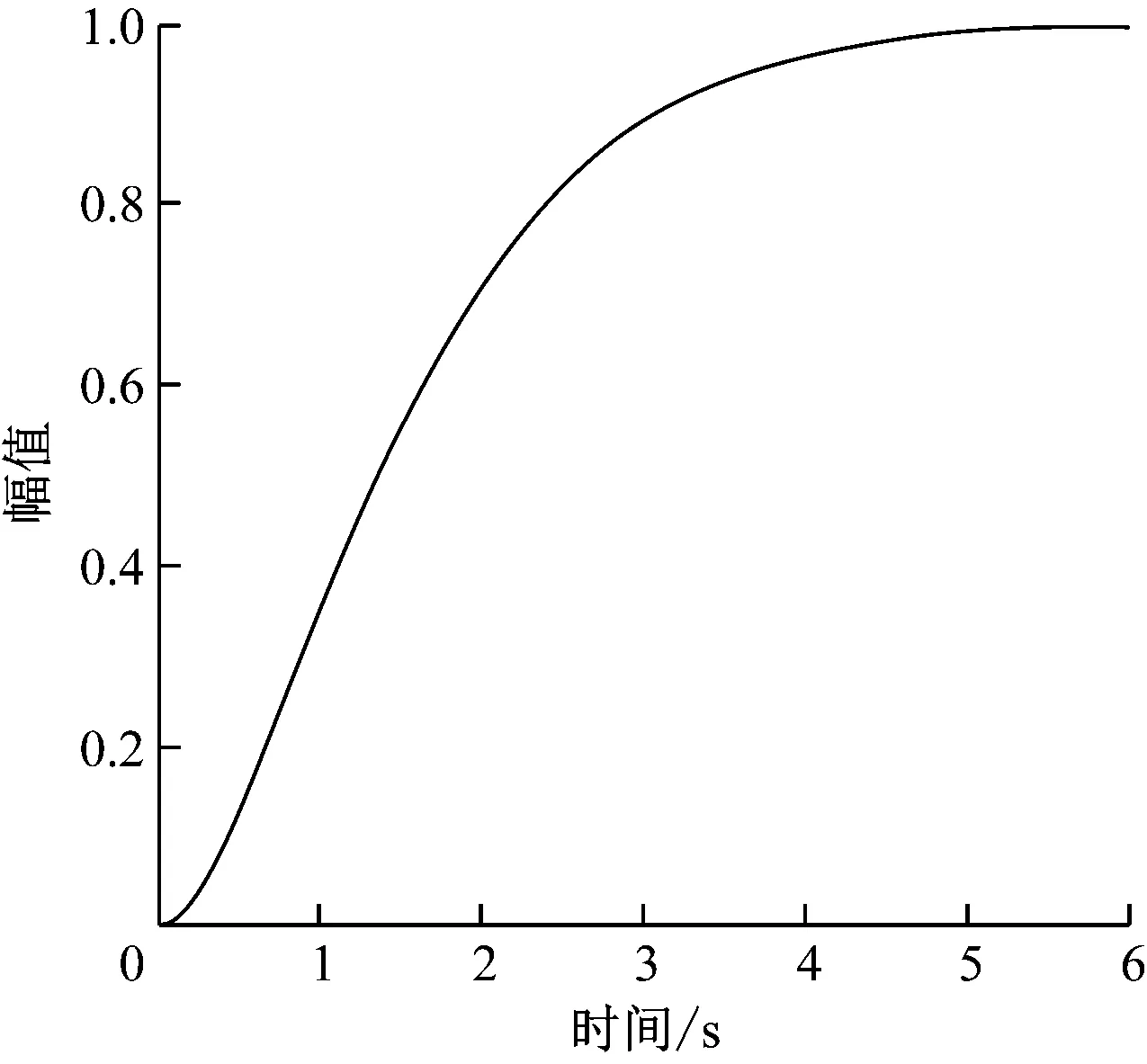
图13 角速度参考输入系统阶跃响应(K1)
以Td作为输入,以ω作为输出时,子系统的传递函数如:
(2)
系统的阶跃响应如图14所示。
优化反馈增益矩阵后,系统有着优秀的性能,角速度输入稳态时间小于0.7 s,超调量小于1%,对于干扰力矩也有较强的抑制性能,系统有着较强的抗干扰能力[3]。MATLAB计算命令行如表3所示。
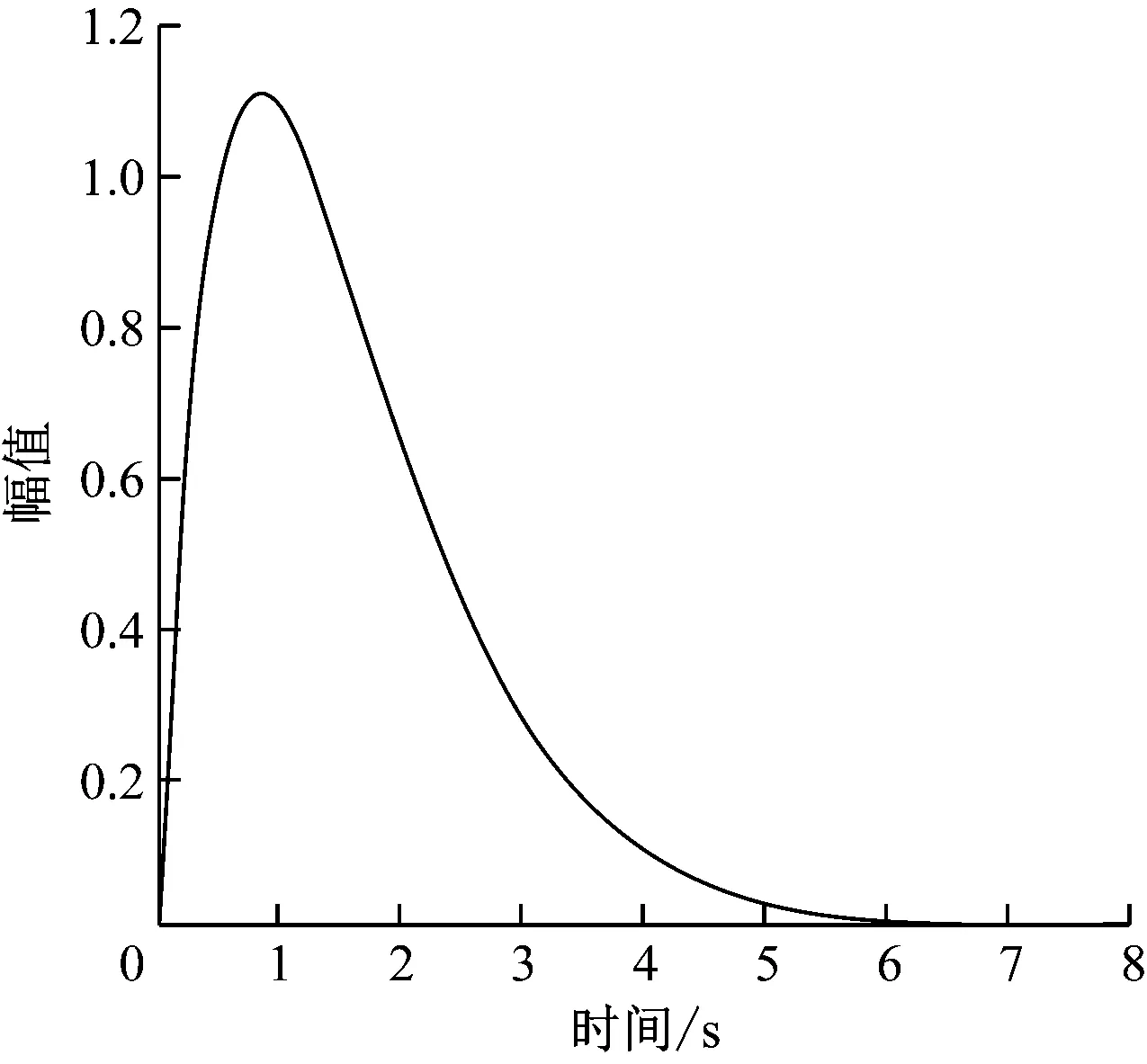
图14 干扰力矩输入系统阶跃响应(K1)
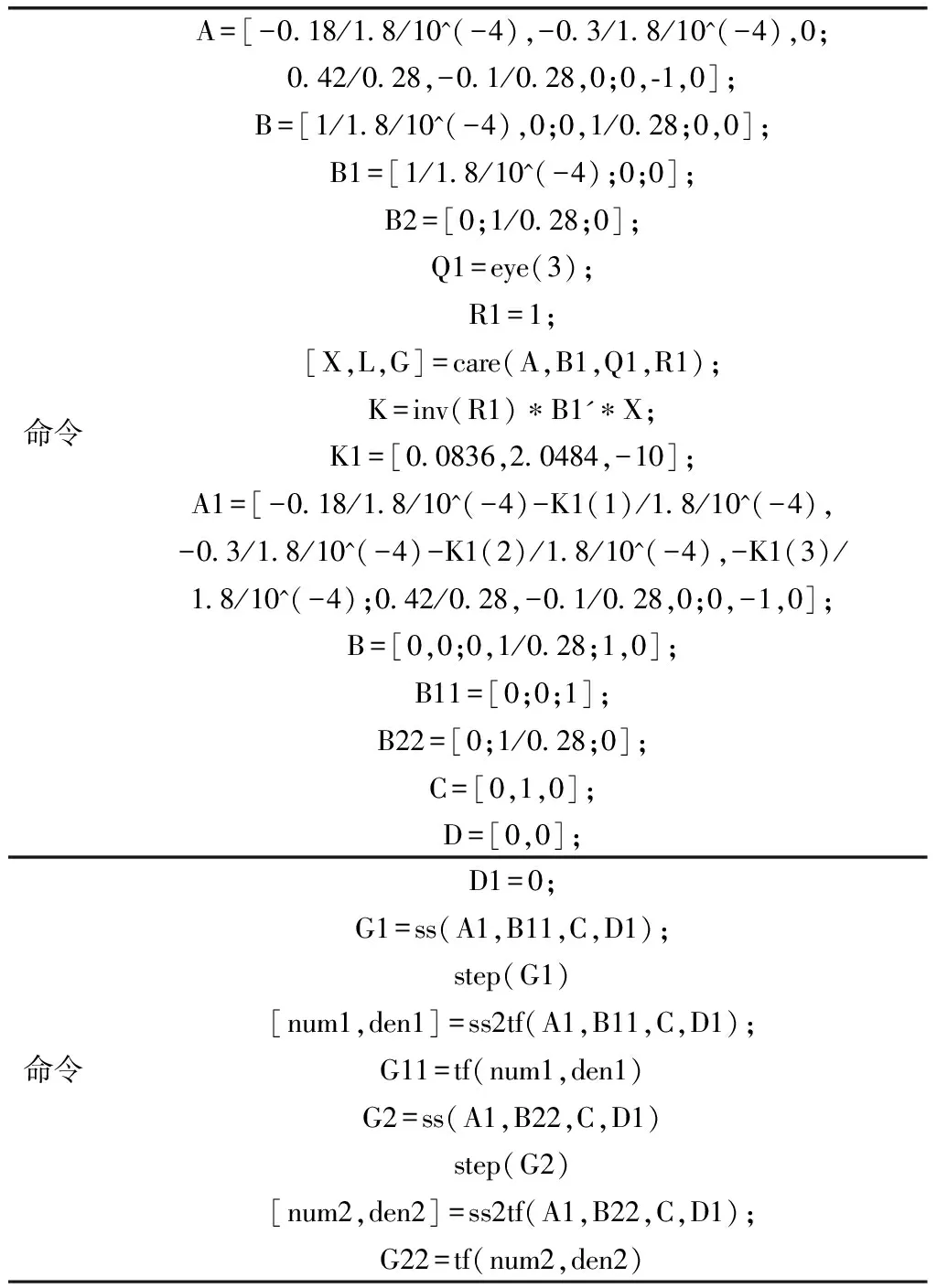
表3 MATLAB计算命令行
从表3可以看出,在建立A、B、C、D4个矩阵后,并配置Q、R加权矩阵后使用care函数求解出黎卡提方程的解,然后代入式(3)便可求解出反馈矩阵K。
u*=-R-1BTPx=-Kx
(3)
5 分储装置自动控制仿真调试
5.1 信号连接变量表及物体名称表
通过Siemens NX MCD中的机电一体化概念设计进行分拣控制系统仿真调试,并将列出相关信号连接变量表以及仿真调试结果[4]。
建立关于刚体、碰撞体、运动副、传感器的物体名称并连接相关信号,具体名称如表4所示。
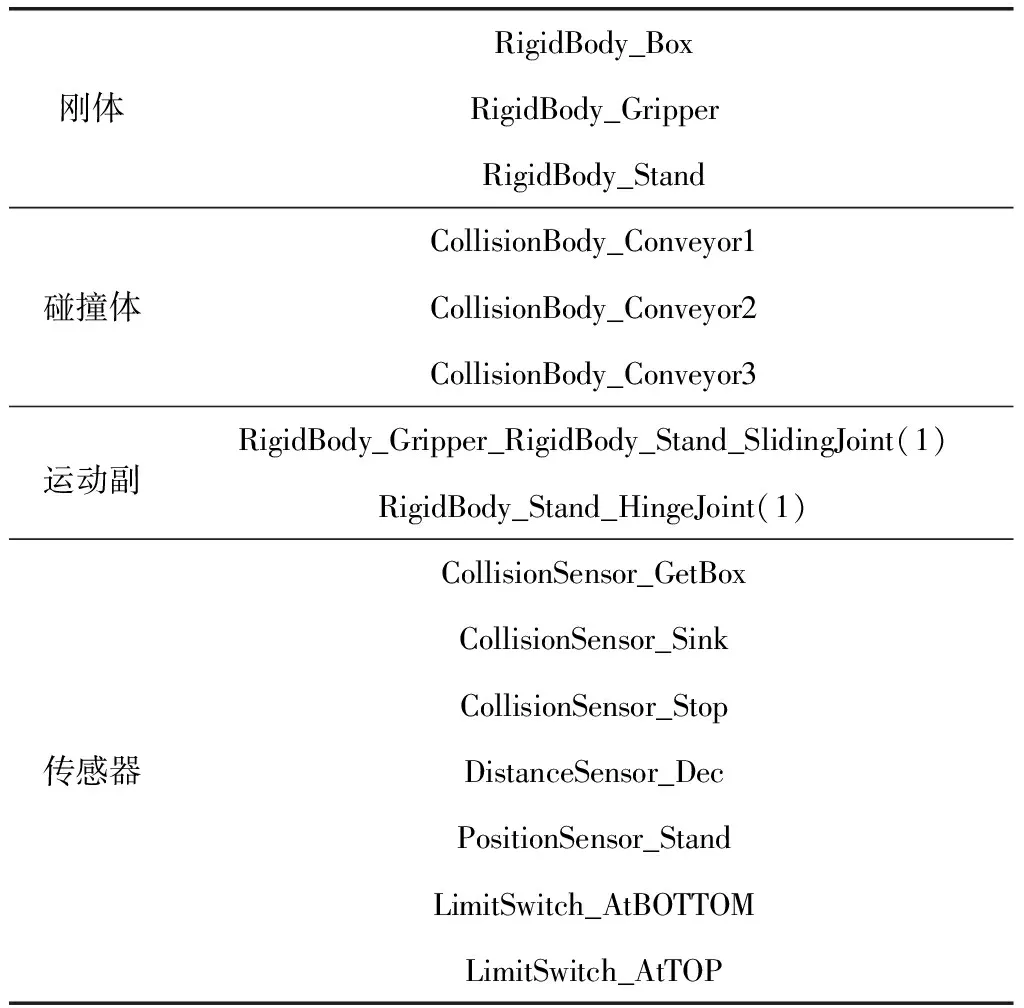
表4 MCD部分物体名称
刚体为具有物理意义的模型,软件会生成刚体的力学表达式;碰撞体为去除重力的力学表达式,可用作传送带表面等模型;运动副为可运动部件的模型,建立后可进行水平、垂直或旋转运动;传感器输出逻辑信号[5]。
NX MCD软件中的信号与PLC中的部分IO变量连接如表5所示。
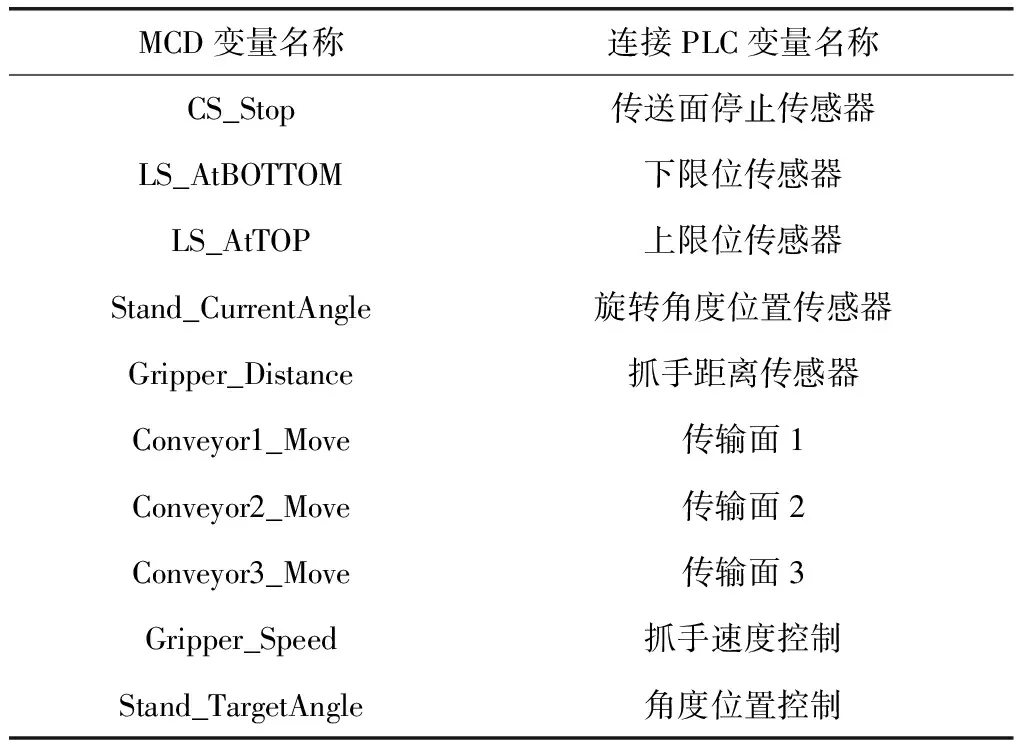
表5 MCD部分变量连接表
5.2 仿真调试
仓储第1层与第3层即将满载,提升机即将动作,将物件转送到其他仓储层中。分拣贮藏仿真调试如图15、图16所示。
仓储装置装载物件已满的形式,该分拣仓储装满的时间为30 min,同时可以从图15看出当仓储装置已满时每个装置将会自动停止运行。

图15 分拣贮藏进行中仿真调试
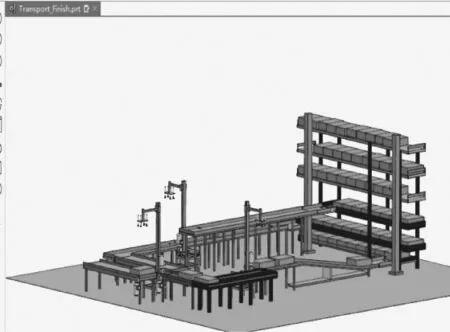
图16 分拣贮藏完成仿真调试
6 总结
基于PLC的PID算法控制应用,亦可将相关算法应用于PLC控制程序中,并通过西门子的机电一体化概念设计NX MCD软件进行仿真调试,该分拣储存及取用装置自动控制及仿真系统多应用于设计及现场调试前的仿真调试,其结论能对工程设计及现场安装运行提供极高的技术指导意义和设计参考[6]。
