舰艇作战系统动态零位精度对准可实施性分析*
2022-05-11周锦锋
周锦锋
(海装驻上海地区第二军事代表室 上海 200129)
1 引言
舰艇作战系统零位一致性是决定舰载武器系统射击精度的重要因素[1]。舰艇作战系统对准工作(零位标校)是一项复杂的系统工程[2],贯穿于舰艇的设计、制造和服役全寿命周期。“作战系统对准”(GJB1233A-2008《舰船系统对准要求》)定义为“各系统(设备)同一姿态角信息的机械零位及电气零位在甲板坐标系内取齐的过程”[3],即作战系统对准是将全舰探测器、跟踪器、武器系统、导航等系统和设备的机械零位和电气零位统一于一个基准,保证作战系统零位的一致性[4]。本文主要探讨新造舰艇作战系统的对准工作。
2 目前国内外作战系统对准的方法及存在的问题
作战系统零位一致性是决定武器系统射击精度的重要因素。舰艇作战系统对准工作就是在舰艇各系统及设备在机械零位一致的情况下对各系统及设备的电气零位进行一致性对准。目前,国内外对作战系统机械零位的对准方法[5]基本一致,即在系统和设备的安装过程中,通过严格把控系统和设备安装的水平度和首尾线对准等要求来满足作战系统机械零位的一致性。作战系统电气零位的对准主要是通过数字或模拟量修正,调整传感器和武器的电气零位,以满足作战系统电气零位一致性的要求,电气零位主要包括角度零位(舷角和仰角)和距离零位两部分[6]。目前,国内舰艇作战系统对准的方法主要是瞄星法和互瞄法[7],均为静态的零位标校方法。国外主要采用对多个方向进入的移动目标进行动态零位精度标校的方法。
2.1 瞄星法
瞄星法(结合有源标标定法[8~9])主要在舰艇系泊状态下组织实施。舰船在系泊状态下,采用电子有源标,并以GPS为真值实施对警戒搜索雷达的舷角和距离精度标校以及对跟踪传感器的距离精度标校。通过瞄星法实施对跟踪传感器光轴(出厂前已完成光电匹配校正)的舷角、仰角精度标校以及武器的舷角、仰角精度标校。甲板经纬仪是一种测量某一目标点相对于经纬仪所设定的平面和零位中线的仰角和舷角真值的精密仪器设备[7]。瞄星时,甲板经纬仪以及各设备水平零位在相互平行的平面上(各平面与舰艇基准平台平面平行),且舷角零位与舰艏艉线平行。因为被测目标星体的距离相对于甲板经纬仪与设备之间的距离可以近似认为无穷远,所以甲板经纬仪与设备观察星体的视线相互平行,甲板经纬仪观测星体的舷角和仰角测量值理论上就是各设备对星体的舷角和仰角的真值[7]。

图1 瞄星法示意图
瞄星法为一个方向位置的静态精度标校。在该方位上,瞄星法具有对准精度高,实施较为简单等优点。但目前甲板经纬仪没有在过程中使用,一般使用大地经纬仪,测量精度得不到保证[10];该方法需要通过甲板经纬仪一次对准,直接观测星体,故受气象条件影响较大[7];随着时代的发展,满足条件的码头周围光污染越来越严重,对星体的观测也越来越困难;影响瞄星法精度的主要因素为经纬仪人工架设的误差以及各设备人工瞄准的误差,某些舰船由于设备较多,需几个晚上才能标校完成,经纬仪就会存在多次人工架设误差。
2.2 互瞄法
互瞄法(结合有源标标定法):主要在舰艇半坐墩状态下组织实施。舰船在系泊状态下,采用电子有源标,并以GPS为真值实施对传感器的距离精度标校。通过互瞄法实施对跟踪传感器光轴(出厂前已完成光电匹配校正)的舷角、仰角精度标校以及武器的舷角、仰角精度标校。该方法通过架设在舰上的经纬仪与架设在岸上的经纬仪互相瞄准,达到两者光轴重合,岸上经纬仪测量出的各设备的舷角和仰角作为真值,各设备测量出岸上经纬仪的舷角和仰角,与真值比较进行修正[7]。测量时,需要岸上经纬仪水平零位与舰上经纬仪及各设备的水平零位在相互平行的平面上,且岸上经纬仪舷角零位与舰艏艉线平行。测量时,需要将大地坐标系内岸上经纬仪测量的舷角和仰角真值转化为舰艇甲板坐标系的舷角和仰角真值。
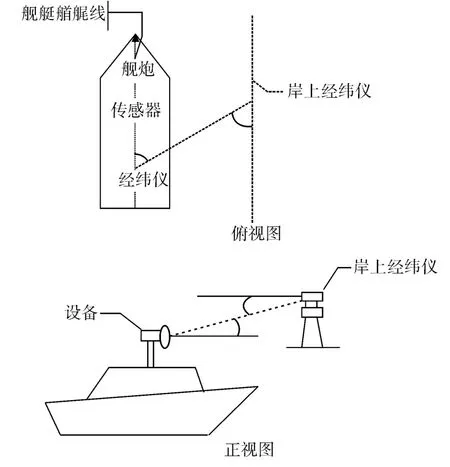
图2 互瞄法示意图
互瞄法为一个方向位置的静态精度标校。互瞄法是由瞄星法发展、演变而来的一种方法。在瞄星过程中经纬仪需要一次对准,互瞄法则需要两个经纬仪对准,所以从理论上来说,互瞄法最大误差系数比瞄星法误差系数增加了一倍左右[7]。互瞄法操作过程较为复杂,在实施的过程中人为误差因素较多。由于一部经纬仪架设在岸上,一部经纬仪架设在舰船上,涉及到两个坐标系的转换,所以对舰船的整个过程姿态要求比较高,舰船必须在船坞半坐墩状态,且相对于大地的水平姿态要求比较高。
2.3 国外某三坐标雷达零位精度对准方法
国外某舰艇航行试验时某三坐标雷达进行了动态零位精度对准,内容涉及对空的精度标定和对海的精度测试。
该雷达对空精度标定方法:空中目标(飞机,目标高度3000~5000m)从相对试验舰四个不同特征方向(0°、90°、180°、270°)进入,该雷达以警戒方式实时跟踪并录取目标数据(距离、舷角、仰角),飞机携带的GPS和试验舰配置的GPS同时实时记录各自的坐标位置等相关参数。待四次进入完成后以两个GPS数据为真值分析、比对雷达录取的目标数据(距离、舷角、仰角),如其平均差值大于精度值,则修正后重复进入标校。标校前为保证数据的有效性需将GPS和雷达进行对时,保证时间轴统一。判别合格的标准为四个不同方向进入的目标参数平均差值不大于指标值。
该雷达对海的精度测试方法:待对空的精度标定完成并合格后,以较小目标的配试船直线由远至近航行约10km,以GPS为真值验证雷达精度(舷角、距离)是否满足指标要求。
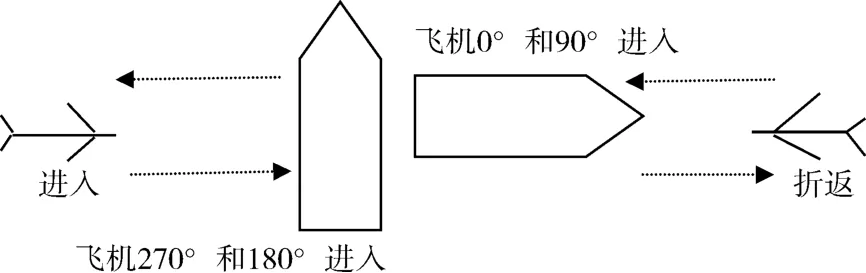
图3 对空动态零位标校示意图
对比该型雷达与国内各型传感器,其距离精度略高于国内各型传感器的指标要求,舷角和仰角精度要高于国内警戒传感器的精度要求,但略小于跟踪传感器以及武器的精度要求。
3 一种舰艇作战系统动态零位精度对准的思路和方案
3.1 舰艇作战系统动态零位精度对准的思路
瞄星法和互瞄法均为一个方向位置的静态精度对准,武器系统的有效打击范围一般是跟踪传感器的视界和武器自身射界的公共区域,而不只是一个特定方位,一个方向位置的精度对准存在一定的不确定因素。静态下的武器系统零位一致性对准(瞄星法和互瞄法)只是在方位的某一点完成了传感器和武器各自零位的精度对准,而武器使用所需要的是动态下的系统精度一致性,该工作一般都是舰艇交付后由专业人员在武器射击精度试验前通过动态零飞来完成。国外某三坐标雷达零位精度标校的方法其精度不满足跟踪传感器以及武器的精度要求。
为了解决以上几种方法存在的问题,使新造舰艇交付后即具备更高的作战系统零位精度,更好地满足武器系统实际使用过程中所需要的动态系统精度一致性,提出了一种舰艇作战系统动态零位精度对准的思路[11]。舰艇作战系统动态零位精度对准在完成传感器(警戒和跟踪传感器)动态零位精度对准的前提下,协调武器完成动态精度一致性的对准,该方法一定程度上完成了动态下的系统精度一致性校正,更贴近武器实际使用状态。
3.2 舰艇作战系统动态零位精度对准的方案
1)机械零位对准:机械零位对准的方法与瞄星法和互瞄法一样,即对基座的制造、船体中心线、基座定位、基座船台加工进行严格控制,在系统和设备的安装过程中,通过严格把控系统和设备安装的水平度和首尾线对准等要求来满足作战系统机械零位的一致性。要求设备水平度和首尾线对准测试合格。
2)传感器(警戒和跟踪传感器)电气零位对准:采用四个不同特征方向(0°、90°、180°、270°)移动目标(无人机)进入的动态零位精度标校的方法。无人机从相对试验舰四个不同特征方向(0°、90°、180°、270°)进入,传感器实时跟踪并录取目标数据(距离、舷角、仰角),飞机携带的BDS和试验舰配置的BDS同时实时记录各自的坐标位置等相关参数。待四次进入完成后以两个BDS数据为真值分析、比对传感器录取的目标数据(距离、舷角、仰角),如其平均差值大于精度值,则修正后重复进入标校。标校前为保证数据的有效性需将BDS和传感器进行对时,保证时间轴统一。判别合格的标准为四个不同方向进入的目标参数平均差值不大于指标值。动态零位标校示意图见图4。
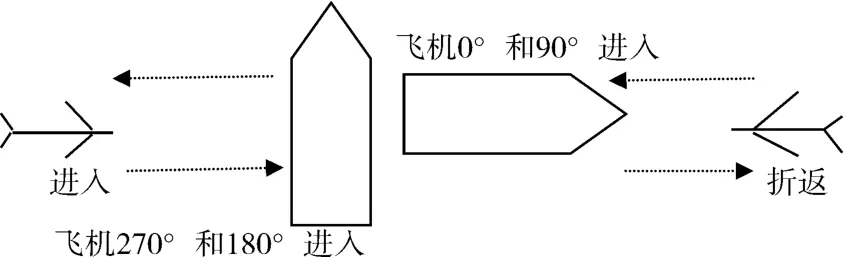
图4 舰艇作战系统动态零位精度对准示意图
3)武器电气零位对准:以系统为单位采用动态零飞(零飞仪)测试方法[12~13]。“零飞测试”工作原理:火控雷达捕获目标后稳定跟踪,按射弹飞行时间为“零”解算诸元并输出,带动武器跟踪目标。即把雷达测得当前目标点球坐标转化为球坐标输出带动武器跟踪目标[14]。零飞测试精度较高,理论上武器应直接指向目标,用架设在身管上和身管轴线标定好的摄像机采集图像,则图像应在视场中心,偏离视场中心的误差量就是武器的舷角和仰角误差量。
4)对海精度检查:待对空的精度标定完成并合格后,以较小目标的配试船直线由远至近航行约10km,以BDS的数据为真值验证传感器(舷角和距离)和武器(舷角)的精度是否满足指标要求。
4 舰艇作战系统动态零位精度对准可实施性分析及主要研究内容
4.1 可实施性分析
舰艇作战系统动态零位精度对准完成了动态下的系统精度一致性校正,更贴近作战系统和武器的实际使用状态。但该方案也推翻了原先国内的传统思路,需要总体和系统责任单位的支持和确认:需协调各传感器实时录取并输出跟踪目标的相关参数(距离、舷角、仰角):需协调各武器系统技术责任单位确认动态平均值的精度判别标准;需编制适用于各型舰船动态标校的具体实施方案和流程。
1)该方案用无人机替代国外方案中的飞机,无人机搭载龙伯球角反射体,标校时飞行多个架次,飞行高度不小于1000m,需申请空域保障。无人机必须具备慢速、航向稳定、能携带BDS和反射体等条件,并且具有海上回收多次利用的能力。目前,国内某靶机可加装龙伯球增加其反射面积,其航速也能满足动态标校需求,而且其具备的海上可回收能力不但能满足多架次的标校需求,同时也能满足加载BDS的数据回收要求。
2)无人旋翼直升机搭载龙伯球角反射体也能代替该靶机,无人旋翼直升机具有飞行距离远、飞行时间长、操控简单、航路规划便捷等优点,可保证标校期间采集足够的真值数据,获得较广的标定距离、方位、仰角变化范围。龙伯球外形呈圆球形,直径300mm,内部发射体在立体上大于240°,加挂到无人直升机上后,基本不受无人机飞行航路限制,可保证雷达接收到龙伯球的有效反射信号[15]。
3)可考虑用BDS代替GPS,基于载波相位的BDS差分定位精度可达厘米级,完全能满足动态标校的精度要求[15]。该方案用BDS代替国外采用的GPS,真值精度的提高,能进一步提升跟踪传感器的标校精度。
4)目前,国内零飞测试应用比较多,技术也相对成熟,零飞仪的选择面也相对广泛。
舰艇作战系统动态零位精度对准方案采用国内相关成熟的技术和设备,可实施性好。
4.2 方案的主要研究内容
1)BDS设备配置以及相对应的数据处理软件开发;
2)调研、协调并选择满足动态标校保障需求的可回收无人机;
3)协调各型相关传感器,具备实时录取、处理传感器跟踪目标的标校数据能力;
4)协调各武器系统责任单位,确定动态零位标校替代传统标校的可实施方案;
5)调研各型武器动态零飞(零飞仪)测试方法或研制满足各型武器精度标校的标校仪;
6)开发并验证适用于动态标校的数据处理软件;
7)分析舰艇姿态对作战系统动态零位对准精度的影响[16]。
5 结语
舰艇作战系统动态零位精度对准方案采用国内相关成熟的技术和设备,可实施性好。该方案用多个方向的移动目标进入的动态零位精度标校法对传感器进行对准,用动态零飞对武器系统进行对准,完成了作战系统动态下的系统精度一致性校正,贴近武器实际使用状态。
