高铁列控系统中的列车定位技术分析
2022-05-11孔繁军
孔繁军
(辽宁省交通高等专科学校 轨道交通工程系,辽宁 沈阳 110122)
0 引言
列车定位的基本功能是在任何时刻、任何地方都能够精确地确定列车的位置坐标,包括与列车相关的间隔、速度及加速度[1]。列车定位技术是检测和验证高铁列控系统是否合格甚至优秀的一个重要标准,也是制约高铁运行速度和运营间隔的一项关键技术。列控系统要求列车实时检测速度和位置信息,才能保证列车的安全运行和正点到达。
1 无绝缘音频轨道电路法
该方法就是利用轨道电路检测列车是否占用轨道电路区段实现定位。S型连接棒音频轨道电路是应用较广的一种方法,该方法采用电气绝缘来实现区段的划分。
1.1 定位原理
发送端以差分模式通过线路钢轨向接收端传输调制信号。在轨道电路的另一端(即接收端)提取这个信号,接收信息和传送信息经逐位比较确认相同后,即可完成对接收信息的验证,以判断钢轨占用和轨道电路的工作状态。当轨道区段内有车占用时,由于列车车轴的阻抗远小于钢轨,信号会被车轴“分路”掉;接收端可检测到信号电平的变化,从而判断列车到达相对应的轨道电路位置,工作原理如图1所示。

图1 轨道电路的工作原理
1.2 评价分析
轨道电路法属于固定闭塞制式的一种传统定位方法。因此,该方案是一种粗定位方法,但该方法是许多其他定位方法的依据和基础,具有很高的参考价值。
优点:该方法可以利用现有设备,不需要再投资,技术相对成熟稳定。另外,该方法除了具有基础的检测列车占用功能外,当出现断轨、线路被滚落的山石切断时,还能体现“故障-安全”原则。
缺点:(1)该方法只能确定大体闭塞分区,无法确定该闭塞分区的具体位置,因此列车实施制动的起点和终点都在闭塞分区的边界处,为确保安全,需要增加一段50 m左右的安全防护距离,这就会加大列车的运行间隔;(2)由于存在送电和受电设备,因而轨旁设备数量较大,后期的维护成本和工作量也较大;(3)轨道电路易受震动、天气、环境和车轮洁净程度的影响,风雪天气和风沙较大会导致分路不良,道砟阻抗和牵引电流等因素也会造成干扰。
1.3 应用情况
该方法应用于日本的新干线和数字新干线ATC列控系统、法国的TGV铁路,以实现粗略列车位置检测。
2 查询/应答器法(信标法)
应答器是安装在线路沿线反映线路绝对位置的物理标志。地面应答器与车载应答器、轨旁电子单元配合使用以实现列车定位。地面应答器主要分为有源和无源两种。应答器内部存储的数据,固定不变的称为无源应答器,数据可更改的是有源应答器。应答器安装在钢轨中间,外部封装完好,完全能够应对外部复杂的环境。
2.1 定位原理
当线路上运行的列车经过地面应答器时,设在车底的车载设备会向该应答器发送高频率的电磁波,该电磁波也是应答器的工作电源,然后应答器将列车当前的绝对点物理位置信息传递至列车,即可再次获得新的列车位置信息。
2.2 评价分析
查询/应答器定位法是一种属于准移动闭塞制式列控系统中的定位方法。查询/应答器法是一种相对准确的定位方法。很多其他的定位方法都通过该方法来提高定位精度。
优点:(1)设备简单,维护及运行成本也较低;(2)抗干扰性较强,能适应恶劣气候条件,可以在任何环境、任何地点可靠地工作;(3)使用寿命较长。
缺点:只能给出点式定位信息,如若希望准确定位就必须在轨道上铺设大量的应答器,故存在设置间距和投资规模的矛盾。
2.3 应用情况
欧洲的ETCS-2列控系统是典型的应用查询/应答器方法来实现列车定位的。在ETCS-2列控系统中,车载设备具有确定列车位置的功能。该功能是依据地面应答器收到的信息并以此为基准点通过测速单元等设备测量列车运行距离来获得列车位置。计算列车位置时要考虑测速设备的误差。车载设备应定时向无线闭塞中心RBC报告列车位置。
3 多普勒雷达测速
多普勒雷达测速是利用多普勒效应原理实现的。向移动体上发射一定频率的电磁波,反射波与入射波之间会产生频差,这个频差与移动体的速度成正比,这就是多普勒效应。
3.1 定位原理
在机车上安装雷达,它始终向轨面发射电磁波,由于机车和轨面之间有相对运动,因此发射波和反射波之间会产生频差,通过测量频差可以计算出机车的运行速度,并求出运行距离。多普勒雷达工作原理如图2所示。
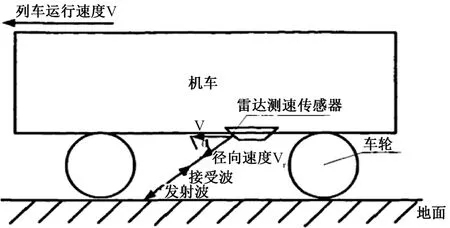
图2 多普勒雷达工作示意
计算公式:

其中,λ是雷达发射波的波长,θ是雷达视线与地面的夹角,vr是列车上雷达相对地面的径向运动速度,v是列车相对于地面的行驶速度,vr是v在雷达视线上的分量,可由公式求得。

只要测出fd,就可求得列车的行驶速度;若列车停止运行,fd=0;当θ=90°时,即雷达发射波与地面成直角发射,fd=0,因此,安装时避免此种情况。
根据多普勒效应原理,目标相向雷达运动时fd为正,背向雷达运动时fd为负。根据多普勒雷达测速原理,若雷达发射波方向与列车运行方向夹角θ小于90°,fd为正,反之,fd为负。计算公式即为:
其中,λ是确定参数,只要求得θ和fd就可以求得列车瞬时运行速度。θ主要由雷达的安装位置所决定,如何快速、准确地得到fd是系统设计的关键点。
3.2 评价分析
当列车运行速度较快的时候采用多普勒雷达来测速和实现定位。
优点:测速精度与车轮空转、打滑无关。
缺点:测量精度取决于雷达本身的性能不同;检测距离所得的累计误差,需由线路上的固定点来校正。
3.3 应用情况
法国国铁开发的连续实时列车监督控制系统(ASTREE)系统采用多普勒雷达来定位的,后来该系统合并到欧洲ETCS系统中,目前应用较为广泛的ETCS-2列控系统就是采用多普勒雷达实现定位的。
4 GPS定位
GPS是一种全球、全天候连续导航定位系统,能够提供载体的经纬度以及速度等信息,其误差范围为15 m误差圆[2]。
4.1 定位原理
利用已知的卫星高度和电波传输速度,即可测出时间。因接收机可跟踪5~8颗卫星(精度或性能差的接收机只能跟踪3~5颗卫星),追踪第二颗卫星可得到一个时间,再跟踪第三颗卫星又得到一个时间,跟踪3颗卫星即可得到相应的时间差,来进行二维定位。在地面已知坐标点设置差分接收台站,对所获得的位置再用固定台站进行差分处理。
4.2 评价分析
GPS是一种高精度卫星定位系统,但该系统非常庞大,也会存在一些定位误差。(1)每个动车组接收机所公有的误差,例如对流层、星历和时钟误差等;(2)传播时延误差;(3)动车组接收机的固有误差,例如通道延时误差、多径效应误差及内部噪声误差等。为了避免和消除上述误差,科技人员也做了一些相应的努力,最实用的就是差分技术。该方法可以消除(1)类误差,但只能消除部分(2)类误差,并且消除程度是由参考站和用户接收机之间的距离决定的,但差分技术对(3)类误差却显得“无能为力”。综上,利用差分技术可以排除SA政策的影响,而且减少了些许产生误差的影响因素,当用户接收机与参考站之间的距离小于100 km时,则可认为它们受到大气层的影响是相同的,根据距离校正鼓消除大气层导致的定位误差。
理论上GPS的定位精度为:水平位置15 m。GPS定位用于动车组定位时,需要增加应答器给予校正。
优点:(1)不受季节、气候影响,可24 h提供定位;(2)成本低;(3)维护费用较低;(4)设备简单体积小,维护方便;(5)理想情况下使用差分定位时,定位精度可达到米级(1 m或0.5 m)。
缺点:(1)在山区、隧道等区段存在定位盲区,必须另加补救措施;(2)需要建立沿线差分站,增加了成本和维护费用;(3)易受到美国卫星政策的影响;(4)由于使用的是美国的GPS,所以一些重要信息的安全性得不到保证。
4.3 应用情况
GPS卫星定位法是一种很先进的现代定位技术,但是由于美国卫星使用政策以及保密性等原因,在当今世界的典型列控系统中都没有采用该定位方法。仅有美国的几家铁路运营工作主要采用该方法进行列车定位;我国的青藏铁路使用该方法作为备用定位方法;日本的新干线等高铁网路也正在逐步将GPS定位方法应用于列控系统。
5 结语
2020年正式投入运行的北斗卫星导航系统将会被应用于列车定位技术。北斗卫星导航系统是我国自主研制、具有完全自主知识产权、能够实现双向通信、采用混合星座组网模式、具有我国技术特色的全球卫星导航。基于北斗导航的列车定位技术是当前列车运行控制系统发展所需,是新一代将着力发展的列车定位技术[3]。