基于TD3 算法的对话策略研究
2022-05-11余承健
洪 洲, 余承健
(广州城市职业学院 教务处, 广州 510408)
0 引 言
在人工智能发展时代,许多对话机器人产品逐渐融入了人们的生活。 如:阿里的天猫精灵、百度的小度和腾讯的小微等智能语音助理。 通过与这些智能对话机器人交互,人们能够获得更便捷的服务。 正是由于其广泛的应用前景,工业界和学术界均给予了高度重视和关注。
对话系统分为任务型对话系统和非任务型对话系统。 非任务型对话机器人又称闲聊机器人,在开放领域内实现尽可能多轮次对话;任务型对话系统的研究方法主要有两种:多模块级联方法和端到端的方法。 多模块级联方法又称为管道方法,各模块功能独立且易于理解,缺点是易导致误差的积累。端到端方法可以将用户的输入直接输入模型,进而得到系统的输出。 可以观察到输入的反馈,但可以用于训练的数据难以获取,并且可维护性和解释性较差。
本文聚焦于任务型对话系统的研究。 其系统主要模 块 为: 自 然 语 言 理 解( Nature Language Understanding,NLU)、对话管理(Dialogue Manage,DM)、自然语言生成(Nature Language Generator,NLG)。 自然语言理解模块对用户输入的文本进行解析,通常有槽填充、意图识别。 对话管理模块的主要功能,是在多轮对话过程中,维护历史信息和当前的状态,并且生成下一轮对话的回复策略,同时也可与外部知识库进行交互。 自然语言生成模块的主要功能是,根据对话策略模块的结果及预先定好的规则,生成自然语言形式的回复。
对话管理在整个对话系统中占据重要地位,直接影响整个系统的性能。 本文从强化学习的角度出发,提出一种结合规划的双延迟深度确定性策略梯度算法,来优化对话策略,改善模型难以收敛的问题。 在代理方面,针对TD3 算法只适合处理连续空间任务的特点提出了改进,使其能够处理离散空间的数据。 在配置环境方面,借助经典DDQ 模型的思想,将其与TD3 算法结合。 实验结果表明,本文提出的模型能够更快的收敛,取得较好的实验结果。
1 相关工作
任务型对话系统的对话策略主要任务是:根据当前时刻的对话状态,在预先定义的动作集中,选择1 时刻的动作。 对话策略直接决定当前对话任务的优劣,因此, 对话策略的设计及其建模过程一直都是研究的热点和难点。 当前,主流方法有基于规则的方法、端到端方法和强化学习方法。
1.1 基于规则方法
基于规则的方法利用该领域的专家分析对话流程,并设定预定义的对话状态及对该状态的回复。最有代表性的方法就是有限状态机和槽填充模型。 有限状态机的状态转换和流程都是预先设计的,所以其流程可以有效地控制,而且结构清晰。但是,这样的状态机无法移植到另一个领域。 对于槽填充模型而言,槽就是对话系统在特定任务中所需要获取的特定信息。 如,地点、时间、天气等。 对话系统通过当前槽的状态及其优先级,决定下一个动作。 对话过程被建模成序列标注,对话顺序是不确定的,获得的回答非常灵活。 但是,也可能产生状态爆炸的情况。 基于规则的方法,虽能够很好的控制对话的流程,却严重依赖专家制定的领域知识,同时很难迁移到新的领域。
1.2 端到端方法
端到端方法是随着深度学习技术的突破发展而提出的。 使用端到端的训练模型,将一个域的序列映射到另一个域。 在某一时刻,对话管理根据上一步词序列和一些结构化的外部数据库,选择概率最高的词汇作为下一步的回答。 通常选择的模型为编码器-解码器,减少了模块化开发的成本。 然而端到端的方法,也受限于对话数据集的获取和标注,无法及时对自身策略进行调整和进行在线学习。
1.3 强化学习
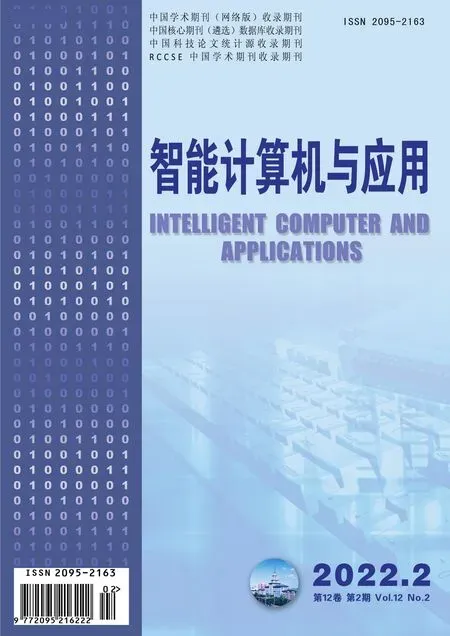
将强化学习的思想应用于对话策略的建模,是当前的主流方法。 通过智能体与环境交互过程中的学习,以获得最大化的奖励,其结构如图1 所示。
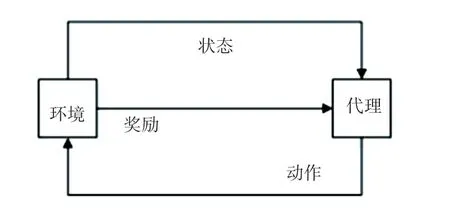
图1 强化学习模型Fig.1 Reinforcement learning model
对话管理的过程可以看作一个马尔科夫决策过程,通常被定义为五元组,,,,。 通过策略π 实现一个行为与状态之间的映射,策略的取值可以是确定值,也可以是随机值。 映射的动作既可以通过一个连续分布函数取值,也可以是离散值。
强化学习的优势:一是无须人工制定规则,且提高了泛化能力;二是可以充分利用状态空间,解决了覆盖率低的问题。 近年来,随着深度学习的快速发展,学者们结合深度强化学习的方法用于建模对话策略,其算法性能在一些领域优于人类。 如:Li 等人通过与机器人的交互学习对话策略,构建了一个用户模拟器;基于DQN模型的算法在订电影票的任务上比基于规则的方法正确率更高;Volodymyr等提出了BBQN 模型,使用辛普森采样对状态空间进行探索,明显提升了效率;Peng 等人为了解决训练强化学习的代理需要耗费大量资源和时间问题,引入用户模拟器来产生大量用于训练的模拟数据,提出了DDQ(Deep Dyna-Q)模型;Su 等人对DDQ 模型进行了改进,引入RNN 鉴别器,用于区分真实的用户经验和生成的模拟经验,从而过滤掉世界模型生成的低质量训练数据,同时减少了训练过程中对于模拟数据的依赖。 从实验结果可见,D3Q对话管理系统的鲁棒性和泛化能力优于DDQ 对话管理模型。
2 结合规划的TD3 算法
对话系统让智能机器人能够使用自然语言的方式与人类沟通,其中任务型对话系统旨在高效沟通并且让用户获取有价值的信息。 在这类对话系统中,通常是由一个任务型对话策略,来提供语言上的行为决策。 近几年,强化学习广泛应用在对话策略模型的学习上,即从基于语言的人机交互中训练对话策略模型。
本文提出一种基于深度强化学习的算法,来提高对话策略的学习效率,即结合规划的TD3 算法。整体结构由5 部分组成,各模块功能如下:
(1)基于LSTM 的NLU 模块,用于识别用户的意图和相匹配的语义槽;
(2)根据识别的结果,进行对话状态的跟踪并生成对话状态表述;
(3)对话策略学习:根据对话状态跟踪的结果,选择一个执行的动作;
(4)根据上一步选择的动作转化为对应的自然语言;
(5)世界模型:用于生成模拟的用户行为和奖励。
本文中的训练是利用预先收集的数据,采用热启动的方式进行的。 模型训练过程如图2 所示,其实现步骤如下:
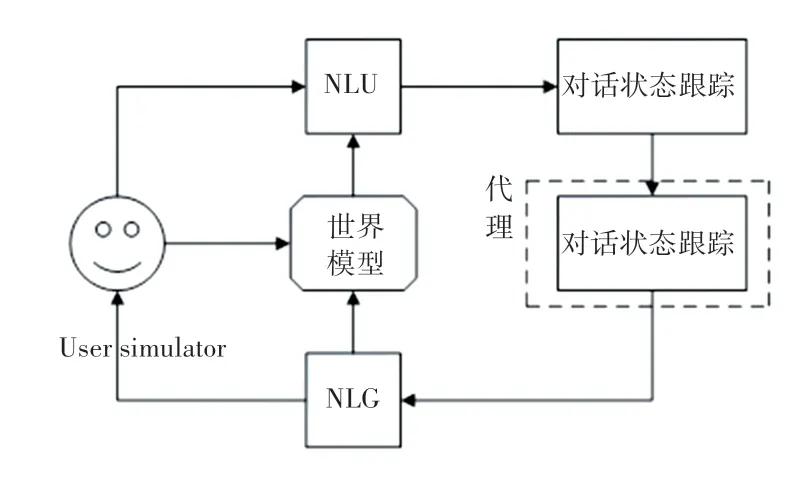
图2 模型训练过程Fig.2 Model training process
(1)代理与用户模拟器交互,利用真实对话数据改进对话策略;
(2)使用真实的对话数据更新世界模型;
(3)将更新后的世界模型的模拟经验用于改进对话策略。
2.1 直接强化学习
直接强化学习的目标,是让代理使用用户模拟器的真实对话数据优化对话策略。 本文利用改进的TD3 算法,根据用户模拟器产生的对话状态,由相应的策略选择动作, 用户模拟器同时反馈给代理相应的奖励,此时对话状态将更新为',最后将对话经验存储到预先设置的经验回放池,继续循环整个过程,直到结束对话。
本文中改进的TD3 算法共有6 个网络结构,如图3 所示。 该算法采用两个结构完全相同的critic网络评估值,选取较小值作为更新的目标。 有效缓解了样本噪声对动作价值估计的影响,以及不准确估计值累加所导致的无法收敛情况。 TD3 算法对策略采用延时更新的方法,由于target 网络与online网络参数的更新不同步,则规定online 网络更新次以后再更新target 网络,从而减少了误差积累,并降低了方差。 TD3 算法采用了一种目标策略的平滑正则化,在target 网络的动作估计中加入随机噪声,使得值函数的更新平滑。
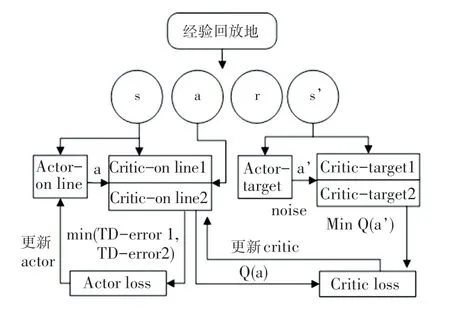
图3 TD3 算法模型Fig.3 TD3 algorithm model
在critic-online 网络中,调节、的值来最小化均方误差损失函数,优化目标函数如下:

其中,为折扣因子,、和分别为crituonline 网络和Actor-online 网络的随机参数。
原始TD3 算法用于处理连续空间的数据,使用梯度求最优值,如式(3)所示:

由于本文对话任务数据均为离散数据,因此使用TD-error 代替梯度计算。 表示在当前的环境中,如何选择动作可以获得最大的奖励期望值,并将actor 网络的输出进行softmax 计算,使用确定性策略,选择一个具体的动作值。 因此将式(3)改为如下形式:

其中,由式(1)可得, log(prob((s |θ)为选择某一个动作的概率值。 可通过软更新机制更新参数,如下所示:

最后,使用深度学习的batch 训练方式,迭代更新对话策略的参数。
2.2 规划
在综合规划的步骤中,世界模型产生模拟的对话数据,然后用来训练对话策略。 在训练本文的模型时,参数是代理用于执行规划过程的次数。 假定世界模型能够准确的模拟用户环境,即在一定程度上增大值来提升对话经验策略。 用户模拟器中得到的真实对话经验记为D,世界模型产生的模拟经验记为D。 虽然规划和直接强化学习都使用改进的TD3 算法,但是直接强化学习使用的是D数据,规划使用的是D数据。
2.3 世界模型
世界模型利用真实的对话数据D来训练其模型参数。 在每一轮对话训练中,世界模型将上一轮的对话状态和上一轮的代理行动作为模型的输入,得到用户的回复动作a、 奖励和一个表示对话是否结束的信号。 网络结构如图4 所示。
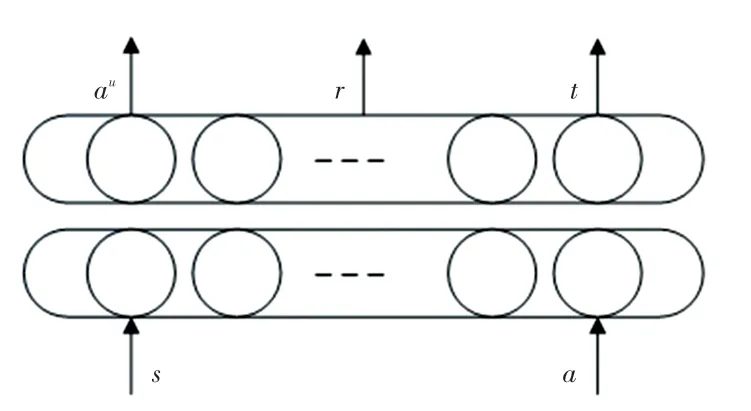
图4 世界模型结构Fig.4 The world model architecture
其中,a、和的计算公式如下:
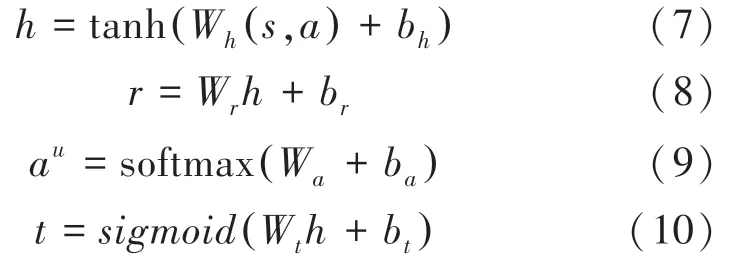
其中, (,) 表示拼接操作,得到的元组数据(,,,') 保存到D中,用于后续代理的训练。
3 实验设置
3.1 数据集
本文使用的数据集已经通过标注,其中包括语义槽16 个、对话动作11 个以及带标记的对话280个,对话平均有11 轮,见表1。
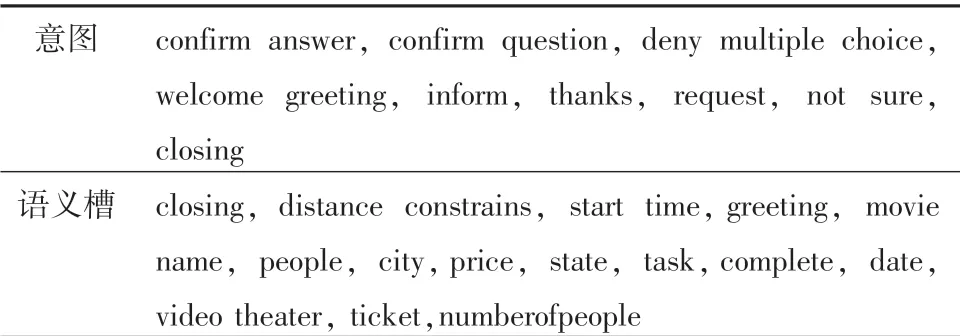
表1 意图和语义槽Tab.1 Intents and slots
3.2 基准模型
(1)基于规则的模型:使用基于人工制定规则的对话策略;
(2)DQN 模型:基于DQN 算法实现;
(3)A2C 模型:使用优势函数代替Critic 网络中的原始回报,作为衡量选取动作值和所有动作平均值好坏的指标;
(4)TD3 模型:即本文中提出的结合规划改进的TD3 算法,引入世界模型,并且综合规划步骤进行学习。
3.3 实验设置和评估指标
实验中深度强化学习网络的激活函数选择tanh函数。折扣因子的值设为0.9,D与D的大小均为5 000。 规划训练过程中,模拟对话的最大回合数为40。 本文所有实验使用100 轮对话的进行预训练,即使用热启动的方式。
主要评估指标为成功率、平均回报、平均轮数。假定测试中所有完整的对话数目为,成功预定电影票的完整对话为,完整对话所获得的总回报为,所有完整对话总对话轮数为。 则:
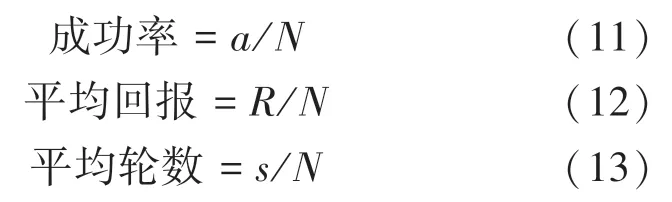
成功率用来衡量模型的主要性能,评估当前的对话策略的优劣;平均轮数和平均回报展示了系统的鲁棒性,这两个指标表明模型所追求的目标,即在最小的轮次获得最多的回报。
3.4 实验结果分析
本文中TD3 模型需要学习结构相同,但是参数不同的神经网络有actor 网络和critic 网络。 实验设置两个网络的参数不需同步更新,critic 网络的打分,决定了actor 网络的动作。 因此,actor 网络的参数更新具有滞后性。 DQN 模型只需要学习一种神经网络参数,其效果要优于A2C 模型。 而本文的TD3 模型要优于A2C 模型,验证了本文提出模型能更快的收敛,提高对话系统的性能。
在综合规划的步骤中,世界模型可以用于减少代理对用户模拟器的依赖和负面影响。对于不同的值,使得代理的训练结果不一致。 世界模型的参数在整个实验的训练过程中也是需要学习的。 因此,实验首要任务是寻找最佳值。 通过设置不同的值进行训练得出:当10 时,世界模型生成的模拟经验效果较好,模型训练效果最佳。
表2 展示了不同模型在10轮对话的最终测试结果。 通过分析可以得出:结合规划的TD3 模型从策略梯度的角度建模对话管理系统,提高了约20%的对话系统性能; 成功率和平均回报稍优于DQN模型所代表的值函数模型;所使用的平均轮数持平。
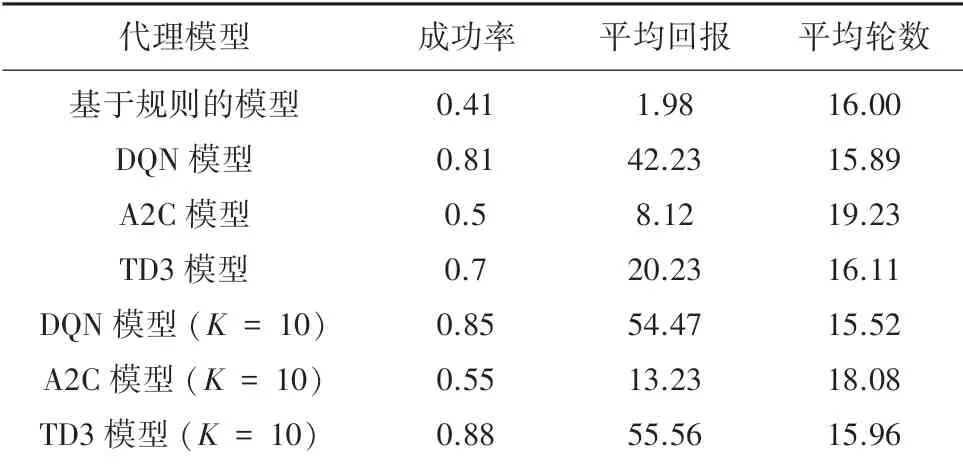
表2 不同模型在10K 轮对话的最终表现Tab.2 The final performance of different models in 10K conversations
综上所述,可以归纳出模型的优点:本文提出的模型适合于规模较大的离散的对话任务;通过经验回放和用户模型的引入,带来比较好的对话策略学习效果,模型易于收敛。
4 结束语
本文结合规划的TD3 算法在模型优化和环境建模做出了改进;在代理设置上,使用基于策略梯度的方法建模对话管理,并且使用经验回放和孪生网络结构,加快了模型的收敛,提高了对话性能;在环境设置上,引入了世界模型,减少了用户模拟器在代理训练的负面影响。 当然,本文在策略梯度函数的设置上还有待进一步的优化,用户模拟器在功能上可以增加真人的对话数据收集等。