城市交通噪声可视化研究
2022-05-10郝苏申许坤波
郝苏申,许坤波,姚 静
(1. 南京工程学院机械工程学院, 江苏 南京 211167;2. 南京工程学院—燕山大学联合研究院, 江苏 南京 211167)
1 研究背景
随着我国城镇化的发展,城市噪声污染问题日益严重,极大地影响了居民的身心健康和工作效率.因此,噪声的监控与管理成为当下我国城市发展需要解决的主要问题之一.噪声的来源复杂多样,包括交通噪声、工作生产噪声、生活噪声等,其中交通噪声占全部噪声的60%~80%[1].噪声的空间与时间分布也呈现多样性,空间上,由于建筑的高低以及面积大小的不一,噪声的空间分布具有随机性;时间上,不同来源的噪声持续的时间长短不一,有的噪声持续稳定,有的噪声会实时变化,有的短暂急促,且一天之内各个时间段的噪声值也不同.
我国现行的常规噪声检测方法是通过事先划定的若干空间网格点进行一定时长的逐点检测,是一种选取特定时间段、特定位置来代表城市整体噪声的抽样调查方法,这种检测方法监测范围有限、同步性差、频次少、监测时长不够,很难满足对城市噪声进行实时监控与有效控制的管理需求[2].因此,需要采取不同的方式来检测噪声,绘制噪声地图是一种有效的噪声检测方法.
2 城市噪声地图
我国城市化发展起步较晚,在噪声地图的研发上欧美国家比较有经验.2002年欧盟发布END指令,提供了一个统一的噪声计算方法和计算标准,英国、法国等国家结合自身城市的特点,绘制了各自的噪声地图.我国发布的《声环境质量标准》等一系列标准规范推荐使用的噪声预测模型是以美国FHWA模型为基础,依据我国的城市特点进行适当修正而来.通过对噪声的实时测量记录数据关联路网、交通等,输入已有的噪声模型进行综合分析计算得到噪声地图.图1为上海市政府绘制的上海市区三维噪声地图.
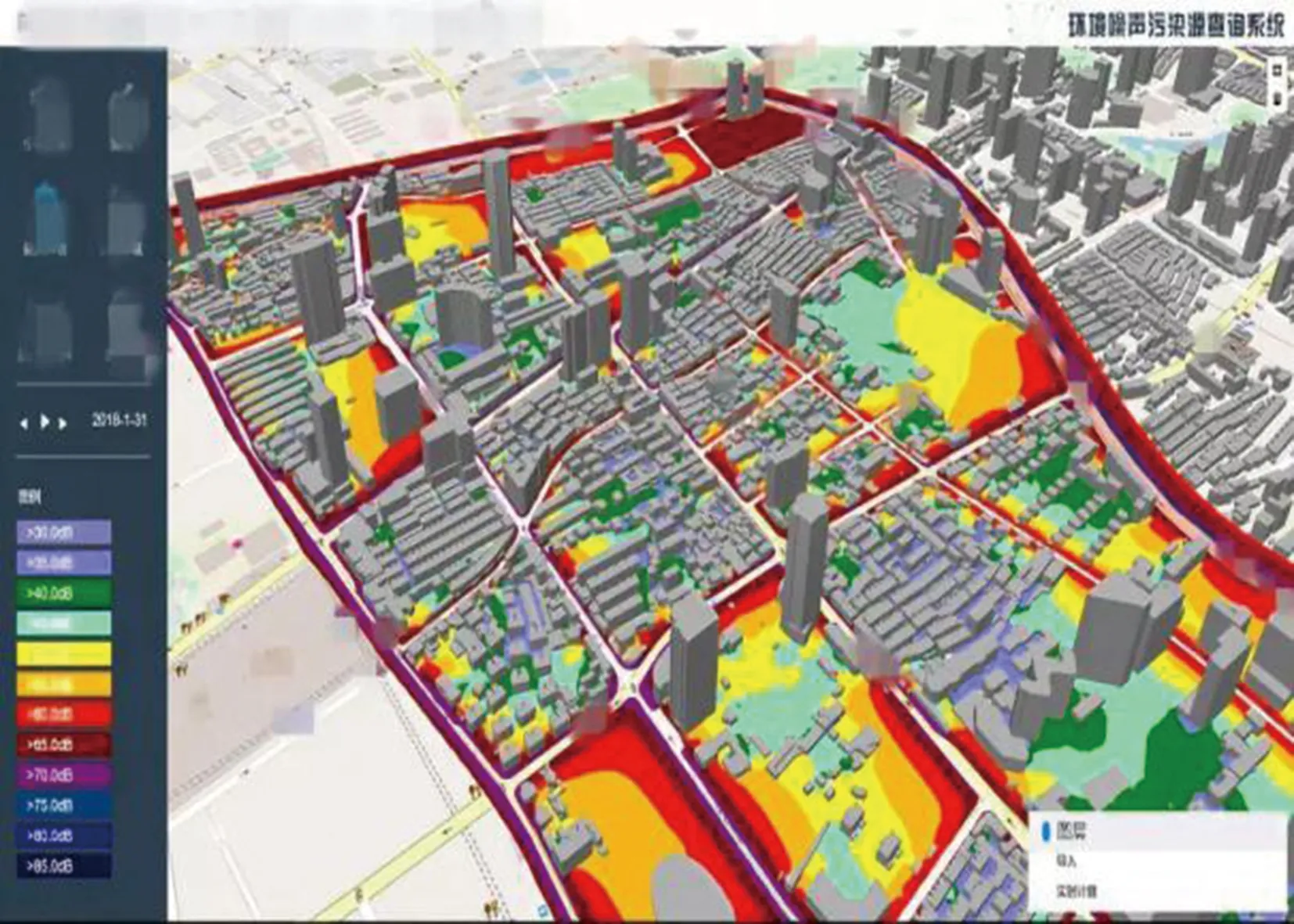
图1 上海三维噪声地图示例
城市噪声的来源复杂多样,分布和传播受到城市环境的影响,包括城市建筑分布、地形变化等因素,噪声的分布具有三维空间的特性,因此,在绘制城市噪声地图的准备工作当中,城市的模型数据必不可少.在建立城市模型的基础上结合噪声监测数据和噪声模型,可得到城市三维噪声地图.图2为交通噪声可视化绘制流程示例图[3].

图2 城市噪声可视化流程示例
2.1 噪声数据的类型
根据声波的波长和受声点距离噪声声源相对距离的大小关系以及声源的几何尺寸相对传播距离的大小,声源可分为三类:1) 点声源的波长远大于声源本身的几何尺寸,以球波面的形式传播,距离越远,辐射声波的声压幅值越小,典型的点声源有人群、汽车等;2) 线声源以类似于线状的形式往外传播,或者多个点声源分布在一条直线上以柱面的形式向外传播,典型的线声源有公路上的一排长车队产生的噪声、火车轨道上的噪声等;3) 面声源的声源面积大、体积大,声源的距离与声源几何尺寸相比较小,噪声以一个面或者几个面均匀向外辐射,面声源在平面上的声能辐射作用处处相等.声源类型如图3所示.
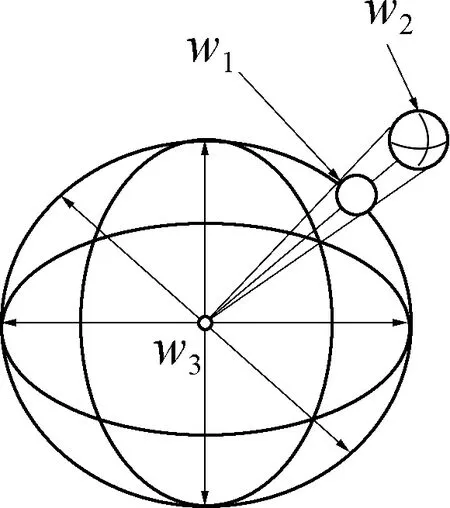
(a) 点声源
2.2 噪声的传播
噪声的大小除了与声源大小相关以外,还与传播路径中的传播距离和遮挡物相关.点声源噪声的传播除了与传播距离相关,还与传播介质的声阻抗有关,声源的尺寸与声波波长相比较小;线声源分为无限长线声源和有限长线声源,当线声源的长度远大于传播距离的时候,可以把线声源看做无限长线声源,此时线声源的噪声大小仅与传播距离有关,当线声源的长度与传播距离相差不大时,可以把线声源看做有限长线声源,此时线声源的噪声大小的计算更为复杂;面声源可看做由多个点声源组成,当传播距离远小于声源尺寸时即可看做面声源,除了传播距离之外,还与点声源之间的相位差、分布有关.
噪声在城市的传播路径会受到遮挡物的影响,建筑物能对噪声进行反射和吸收,起到声屏障作用,声屏障的衰减值最大不超过24 dB[3].建筑群的形态分布也会影响噪声的传播,散点式组合建筑群因建筑间的间距较大使得噪声直接进入,噪声较大;有声屏障高度围合周边式的建筑群对噪声有很好的屏蔽效果.绿化带的植被会对噪声进行漫反射,对噪声有一定的吸收作用,但并不能起到声屏障作用,不能完全消除噪声[4].
2.3 噪声数据的获取
在城市噪声中,交通噪声占比远大于其他噪声之和,具有规律性、可预测性,因此,主要在城市主干道和次干道设置噪声的实时测量点.噪声信号采集在户外进行,监测仪器距离地面高度1.2 m以上,距离除地面外任何反射物至少3.5 m,距离噪声敏感建筑物墙壁或者窗户1 m,并应当在无雨雪、雷电的天气下进行,风速应小于5 m/s[3].
常用的专用噪声采集系统主要由定点监测单元、传输网络、控制计算机和配套的管理软件组成,在靠近测量区域进行噪声数据采集,再结合噪声模型生成噪声地图[5].
2.4 环境噪声的模型选择
常见的城市道路交通噪声模型有FHWA模型、RLS90模型、CRTN模型:
1) FHWA模型将交通流分为三类车型,分别求出三个类别车辆的等效声级,将各类车型的等效声级叠加得到整个交通流中城市道路交通的等效声级.该模型对车流量修正值、车速修正值等变量参数进行优化,对车辆的划分较为细致,缺点是未对环境影响、空气吸收等因素进行修正计算,在建筑物之间的传播只考虑了单次反射[4,6].
2) RLS90模型由德国交通部发布,根据城市道路车道的数量进行分析预测,单车道、多车道以及长直线道路各有不同的预测公式.此模型要求的数据涉及到道路状况、周边环境的数据,包括道路坡度修正、单车道噪声预测值、单车道小时平均车流量等变量参数[6].模型适用于城市的主干道、地区公路和路边隔声设施的效果评估,对于不同情况下的噪声预测模型也不同.该模型又分为声源模型和声传播模型:在声源模型中,车流量的大小影响声源大小,并且将车辆细分为重型车和轻型车两类;声传播模型选取最外侧两个车道的中心线作为线声源,并通过公式进行叠加.该模型的缺点是对车型的划分较为简单,并且将车速设置为限速而不是实际行驶速度,优点是会对声传播过程中会出现的吸收与多次反射情况进行修正[7].
3) CRTN模式是由英国交通部发布的交通噪声模型,该模型将道路进行分段,每段作为一个线声源,考虑每段道路的车流量、车速,大小车的比例、道路坡度等因素,同时还考虑距离的衰减、遮挡物的屏蔽作用以及对建筑反射的修正,最终在接收点处进行整合.此模型考虑因素全面,但是在车流量饱和时误差较大,原因是大型公交车车速远小于小车车速,在大车流量较多、大小车车速差别较大时误差更大[8].
三种模型的分析比较见表1[1-7].
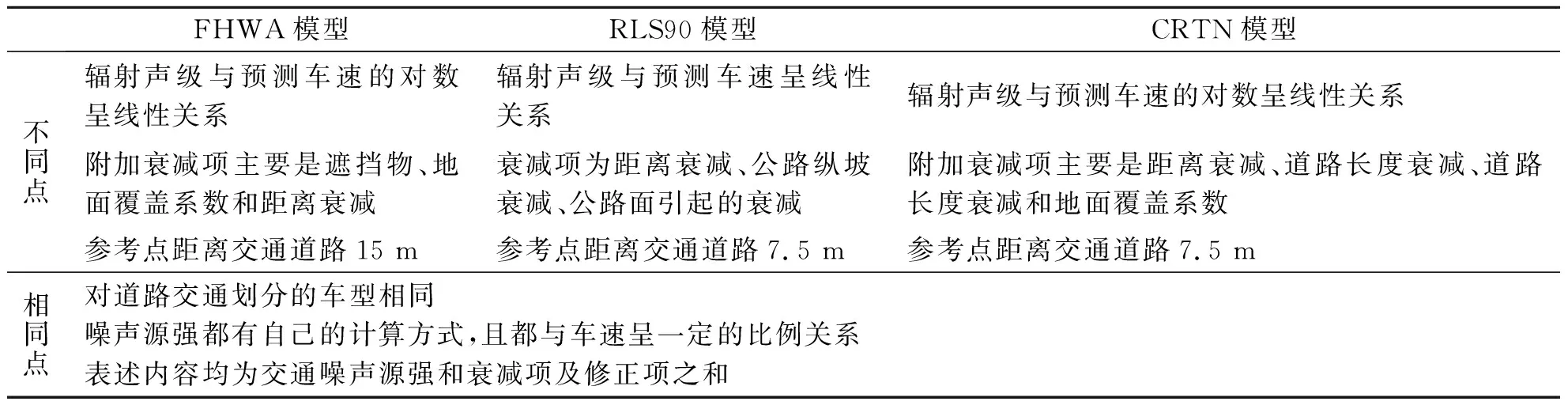
表1 三种模型比较
2.5 噪声地图的数据处理
收集相关数据,结合噪声模型计算后,即可进行噪声地图的绘制.本文选用的噪声数据模型为FHWA模型:
(1)
式中:Leq(h)i为第i类车型车流经过监测点的小时等效声级,dB(A);(L0)Ei为第i类车辆在监测点的能量平均辐射声级,dB(A);Ni为对应观察时间段T在监测点处i类车辆通过的数量,辆;T为观察时段或计算等效声级时段,h;Vi为第i类车辆的平均速度,km/h;r0为测试(L0)Ei的参照距离,取15 m;r为行车道中心线至监测点的距离,m;α为地面覆盖系数;ΔS为遮挡物等引起的衰减量,dB(A);ψα(φ1,φ2)为有限长路段的修正函数,其中φ1、φ2为监测点到有限长路段两端的张角,rad;
简化后的模型为:
(2)
将监测数据代入式(2)进行处理,选取某处连续7天的噪声数据作折线图进行直观展示.
图4为噪声值24 h内的变化图.由图4可见,在3∶00~4∶00时,噪声大小处于全天最低值64~68 dB,在5∶00~9∶00时噪声值急速上升,在9∶00~18∶00时噪声值变化不大,稳定在76 dB,在19∶00时达到峰值76~80 dB,在19∶00时后噪声值开始下降直到第二天凌晨.噪声在一天范围内的变化符合城市居民的生活作息:9∶00是上班高峰,18∶00是下班高峰,噪声值达到一个峰值;在3∶00~4∶00时城市居民基本都在休息,噪声值达到最低值.
2.6 噪声地图的三维可视化处理
选取某一时刻的噪声数据,运用QGIS软件绘制噪声地图.QGIS是一款桌面地理信息系统,利用图层作为基本单位对GIS数据集进行操作.具体绘制噪声地图的过程为:在QGIS软件中添加南京市地图建立GIS数据集,并在地图的基础上新建图层,该图层主要内容是监测点在南京市地图上的分布,将该图层移动到地图上层就可以在地图上清晰地看到监测点在地图上的相对位置.
图5为本次噪声地图数据的监测点,包括玄武大道东杨坊立交附近3个监测点、栖霞大道与仙新东路交叉路口5个监测点、栖霞大道与尧新大道交叉路口3个监测点、兴智路与恒发路路口1个监测点、栖霞大道与仙新路路口2个监测点、仙尧路与尧马路路口1个监测点、仙尧路与五号路路口1个监测点,总计16个监测点.其中13个监测点是在多车道公路的交叉路口附近,这些路口车流量相对较大,监测得到的数据具有参考价值;另外3个监测点都处在双车道公路交叉路口附近,车流量相比于多车道公路交叉口少,但是车速相对较大.监测的数据类型包括车流量(辆/h)、车速(km/h).
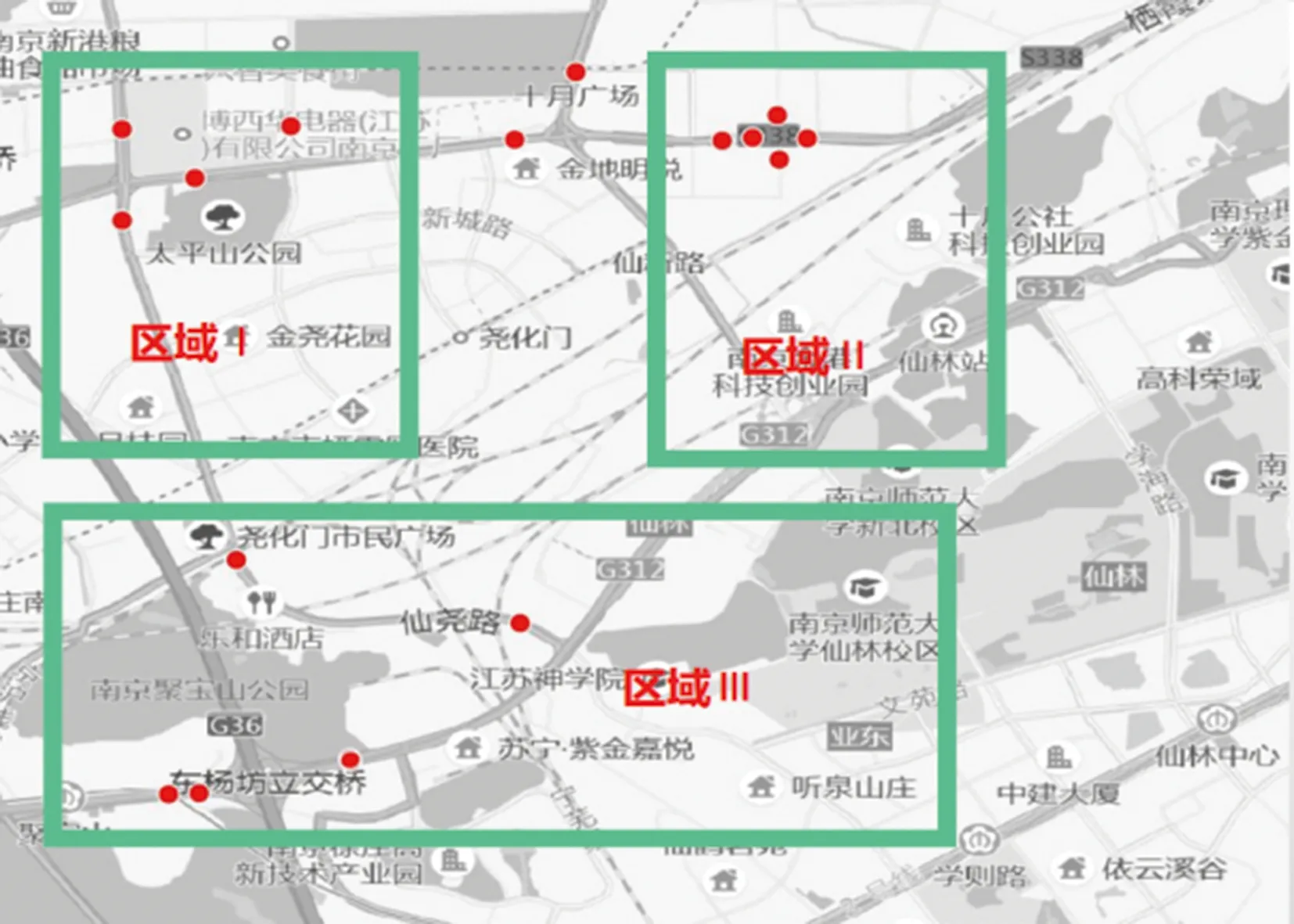
图5 监测点分布图
在监测点图层的属性表中添加经过处理的噪声数据,为各个监测点赋值.在工具箱中选择矢量地理对象中的多环缓冲区功能,以每一个监测点为圆心分别建立直径为100、200、300、400 m的圆,圆心数据为该监测点的噪声值,噪声在传播的过程中会逐渐衰减.在不考虑绿化带等环境因素的影响时,图5中各声源可作为点声源处理,向四周均匀衰减.衰减公式为:
(3)
式中:x为距离点声源的距离;Leq(x)i为x处噪声值;Leq(h)i为点声源噪声值.
在噪声地图上绘制半径x分别为100、200、300、400 m的圆,计算各处噪声值并用不同颜色标记,以此在噪声地图上表达噪声的衰减分布.频带分布图如图6所示.

图6 频带分布图
图7为栖霞大道与仙新东路交叉路口(区域Ⅰ)的噪声地图,由图7可见,在交叉路口的四个方向上噪声大小分布均匀,离路口最远的监测点噪声最小.该区域监测点中心处最大噪声值75 dB,最小值73 dB.

图7 区域Ⅰ噪声地图
图8为栖霞大道与尧新大道交叉路口3个监测点和兴智路与恒发路路口1个监测点(区域Ⅱ)的噪声地图,由图8可见,兴智路与恒发路路口的噪声值大于栖霞大道与尧新大道交叉路口.作为多车道公路交叉路口,栖霞大道与尧新大道交叉路口的车流量大于兴智路与恒发路路口,但是由于车流量大也会导致车速降低,所以兴智路与恒发路路口的车速相对较高.该区域监测点中心处噪声最大值81 dB,最小值71 dB.

图8 区域Ⅱ噪声地图
图9为东杨坊立交和仙尧路(区域Ⅲ)的噪声地图,与图8所示区域相似,多车道交叉路口的车流量较高但车速相对较低,仙尧路的噪声值较高.该区域检测中心噪声最大值77 dB,最小值76 dB.
因为噪声的传播会受到周围环境的影响,故需要考虑城市中道路的起伏变化、土地利用以及建筑的高度差和密集程度等具有空间特性的因素.城市的布局是三维空间,噪声预测模型也具有三维的特点,需要对城市噪声地图进行三维化处理,其中有噪声参数描述的三维化、噪声传播过程中模拟的三维化和噪声模型运算结果的显示三维化.
制作噪声三维地图需要以三维空间内噪声因素的分布为基础制作规则格网接收点.规则格网指的是在三维空间中X、Y、Z三个方向上具有相同的离散距离,将城市的三维空间划分为等大的长方体,进而在三维空间上形成大小规则的六面体.在规则格网之外,三维空间离散化问题的处理方法还有不规则格网离散化,主要应用于突变性强以及复杂程度较高的地区.根据规则格网三维离散化原则和噪声监测的质量要求,一般在三维网格上设置噪声接收点[3].
三维噪声地图与平面噪声地图的最大区别是增加了高度尺寸,使用颜色变化表式噪声的程度变化,更加直观易懂,噪声柱的高度差也容易表现出噪声值的大小,使得观察者能快速抓住重点,便于观察者的研究与决策.
噪声地图建立后,划分区域,将模型预测结果与监测点的噪声实测结果对比进行误差分析,判定噪声模型是否具有可行性.
3 结语
在我国城镇化发展中,噪声污染成为城市环境问题中的主要问题之一.噪声主要是由城市活动引起,其产生以及强度与城市规划、道路交通系统等密不可分.城市噪声的主要来源是城市的交通道路网.
城市道路交通噪声的传播受到城市形态的影响,涉及的因素包括土地利用、建筑分布、地形起伏等.我国的地形起伏不一、形态迥异,城市的结构种类也很多,交通状况各有特点.本文参照国家制定的标准与准则对城市噪声进行评价对比,通过设置噪声监测点测量记录实时数据,对比几个噪声预测模型的优缺点选出最适合的模型,结合监测数据预测城市整体噪声状况,从而制定合理的噪声防治措施.试验分析得出车流量和车速是影响城市交通噪声的重要因素,验证了道路噪声大小与道路交通车流量大小呈现正相关的关系.在一天时间内,白天的噪声相比于夜间的噪声大,特别是08∶00时和18∶00时噪声达到极值.从整体噪声地图来看,噪声值最大为81 dB,最小值为71 dB.采用QGIS软件在地图上呈现噪声的分布和变化,能够直观展现噪声大小分布情况.
