基于最小喷洒单元的植保无人机作业航线优化分割方法①
2022-05-10刘佳晖祖家奎陶德臣李晨毓
刘佳晖,祖家奎,陶德臣,李晨毓
(南京航空航天大学 自动化学院,南京 211106)
当前,为适应现代高效农业的发展趋势,农业农村部积极响应中央号召,正大力加快高标准农田建设步伐,紧紧围绕实施乡村振兴战略,推动藏粮于地、藏粮于技,以提升粮食产能为首要目标.这预示着农田分布将从零星散落向规整集中方向发展,农业植保将面临规模化作业需求,只有通过现代农机装备才能有效解决,这给以无人机为代表的航空植保创造了广大的应用空间[1].无人直升机(unmanned aerial helicopter,UAH)因其大载荷、长续航时间、可悬停以及可随时起降等特点,在农业植保领域扮演着重要的角色,也将成为新型智能农机装备的发展方向.目前,UAH 以及旋翼无人机已经广泛应用于水稻、棉花、枣树等农作物的病虫害防治工作,但究其“能喷”到“喷好”尚且有一个较长的过渡阶段,其中依据航线的自动或自主飞行作业是提高农业植保效率的有效途径之一.
在之前的研究中[2-8],针对不规则形状作业区域总结出三种常见的植保作业喷洒模式,并利用图论学理论提出合理的扫描式航线规划方法,分别从作业航向的选择、作业航点收集、障碍物规避等角度规划出合理的作业航线,使UAH 具有自主作业的能力.然而,当前的研究多是基于单作业区域下理想化的航线规划开展设计的,考虑到UAH 在实际飞行存在飞行约束、任务约束和障碍物约束等复杂情况,需要对较大面积的规则矩形植保区域进行优化分割,以保证UAH 植保过程的高效飞行,满足实际作业需求,提供作业效率.
鉴于此,本文提出了一种基于“喷洒单元模块”的植保航线分割方法,首先确定UAH的全覆盖作业方式,然后根据无流量喷洒模式下无人机电量、油量、药量等约束参数,确定植保作业时最小的喷洒作业单元,利用最小模块切割的思想对矩形农田进行优化分割,最终实现植保作业区域的全局规划和作业航线的优化设计.
1 最小喷洒单元
1.1 全覆盖作业方式
在农田环境参数已知的条件下,常规的无人机全覆盖作业方式主要有“牛耕往复法”和“内外螺旋线法”两种[9-12].在实际飞行过程中,UAH 在频繁的悬停转弯和协调转弯中会因急停或急飞而带来巨大的作业效率损耗,本文在全覆盖作业的基础上提出了两种基于无流量飞行的作业方式,分别为“多次牛耕法”和“矩形平移法”.常规的植保作业优劣的衡量标准主要从飞行效率和喷洒效率两方面考量的[13,14],本文将围绕返航点的选择、转弯次数、作业路程等指标对上述两种衡量标准进行综合分析,从而确定较优的全覆盖作业方式(如图1所示),并根据无流量喷洒模式下无人机电量、油量、药量等参数确定植保作业时的最小喷洒单元(minimum spray unit,MSU).
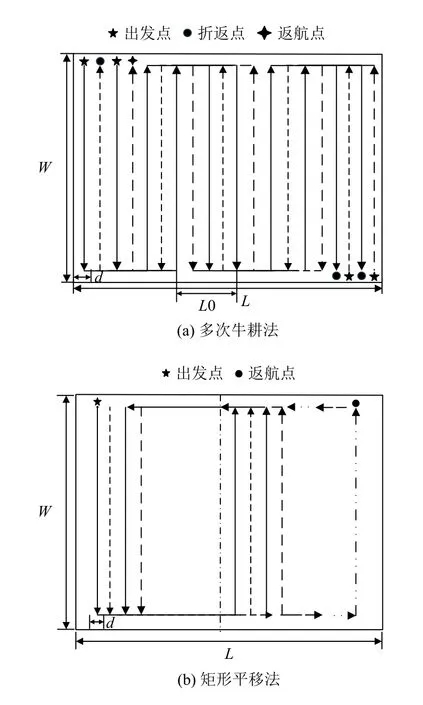
图1 两种全覆盖作业方式
如图1(a)所示,在矩形作业区域中,一般采用牛耕往复式作业方式,其作业路程Smcf和转弯次数Tmcf分别为:

其中,L为作业区域横向长度,W为作业区域纵向宽度,L0为同向作业最大宽度,d为作业有效喷幅,ceil为向上取整函数.
在矩形作业区域的沿横向(长边) 作业与沿纵向(短边)相比中,作业路程和转弯次数较优;当与作业方向垂直的区域长度不是喷幅的整数倍时,采用向右取整的方式,确保整个区域被全覆盖.
如图1(b)所示,沿横向(长边)作业与沿纵向(短边)相比,作业路程Srtt和转弯次数Trtt较优,分别为:
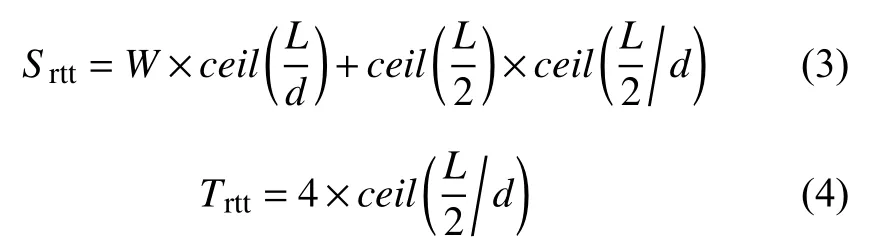
假定上述各式中参数保持一致,将多次牛耕法与矩形平移法的作业路程和转弯次数进行比较,两者作业路程Smcf与Srtt的差距较小,主要取决于L0与L的差值大小;而转弯次数Tmcf与Trtt相比的数值差异较小.综合返航点、转弯次数以及实际喷洒效果等因素,宜采用“多次牛耕法”进行植保作业区域的全覆盖航线设计.
1.2 设计思路
本文以DWK700 中型无人直升机为应用对象(如图2所示),其实际有效载荷可达260 kg.当前,在新疆、黑龙江等地区,农作物的种植面积一般以百亩和千亩计数,农田灌溉系统以及田间管理较为完善,大载荷无人直升机有广阔的应用前景.然而,由于燃油消耗以及药量等因素的影响,单次作业很难完成大面积喷洒作业任务,如果采用断点续飞对大片区域进行全覆盖,其返航点的不确定性所带来的无效飞行必然会导致大量的能源和时间损耗,造成实际作业飞行效率低.

图2 DWK700 型植保无人直升机
针对大区域农药自动喷洒问题,本文提出最小喷洒单元的概念,其实质是在无流量喷洒方式下,根据电量、油量、药量等参数确定单次全速飞行任务,并针对返航点选择合适的作业方式,进而推广至整个区域作业,从而实现时间和能源上的最优.
该方法的设计思想具体描述如下:
假定单次作业药量载荷L为200 kg,续航时间T大于1 h,按5 m/s 速度飞行总距离约18 km,喷洒流量F为5 L/min,巡航飞行速度V为5 m/s,可得UAH 最大作业路程S=V×(L/F),即Smcf约为12 km.假定UAH转弯速度为3°/s,则直角转弯半径R约为150 m,有效喷幅d约为5 m,根据式(1)可推出作业区域的长度L和宽度W、同向作业的最大宽度L0和次数N.通过定量的计算确定最小喷洒单元,为后续大区域分割提供依据.
2 植保区域优化分割
2.1 问题描述
植保区域优化分割可分为两个阶段进行,第一阶段是将不规则区域分割成规则矩形区域,第二阶段是根据任务约束以及飞行约束将矩形区域分割成若干个子区域,然后利用有向连通图理论依次连接各子区域,最终实现离线式全局规划.目前,植保区域优化分割大多处于第一阶段,采用断点续飞的喷洒策略对整个区域进行几字形全覆盖,未对返航点进行合理规划,造成资源的浪费,因此本文提出基于最小喷洒单元的区域分割方法,旨在解决飞行任务和整体作业效益不确定性,给当前植保作业问题一种提供新的解决方案.
2.2 子区域划分与遍历
假定植保区域n为规则矩形,以低遗漏覆盖率为标准,将目标区域n划 分为若干个子区域集{n11,n21,···,n*}n*为自然数,得到的各子区域都是独立的MSU,未划分区域可以使用旋翼机进行几字形全覆盖或使用地面机械逐一喷洒,具体划分情况如图3所示.

图3 植保作业区域划分示意图
为了保证数据信号稳定,UAH 中途补给点一般固定不动,假设该点位于区域n的左上角,此时子区域划分就要考虑不断变化的中途返航路程,以便UAH 确定单次任务实际载荷Ltotal(包括油量和药量),其数学描述如式(5)和式(6)所示.

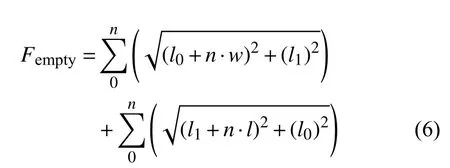
其中,Ltask为单次任务有效载荷,Fempty为单次任务空载飞行损耗,l0、l1为中途补给点到首次起飞点的横、纵距离,n为子区域的个数,w、l分别为子区域的纵向和横向距离.
通过上述分析,利用向右、向下取整的思想尽可能地多划分子区域,未规划区域采用几字形全覆盖喷洒作业,完成全局规划.若是不规则区域,将不规则区域分割成规则矩形区域后,未规划区域同样可采用几字形全覆盖喷洒作业,完成全局规划.
3 仿真验证
3.1 验证方案
假设植保作业区域T(L·W,L为横向长度,W为纵向长度),在同样的初始条件(环境因素、飞机状态、载荷情况等)下,分别采用基于断点续飞的规划方法和基于最小喷洒单元的规划方法对目标区域进行全覆盖作业.
本次验证平台采用QT Creator/C++集成开发环境下自主研发的无人直升机地面监测软件,利用航线设计模块绘制目标区域,根据作业指标设定仿真参数,并将相关数据上传至飞行控制系统,进行半物理仿真验证[15],仿真验证环境如上图4所示,航线规划软件操作界面如图5所示.仿真结束后,统计作业过程中的飞行总距离、无效飞行距离、作业总时长以及能源消耗量等参数,经过对比分析,得出最终结论.

图4 仿真环境整体框图

图5 航线规划软件操作界面
3.2 仿真结果
仿真验证时,选定目标区域T的边界点经纬度坐标分别是(118.786,31.941)、(118.786,31.938)、(118.779,31.938)、(118.779,31.941),作业速度为5 m/s,有效喷幅为10 m,仿真两种规划方法下各指标参数的结果如表1所示.
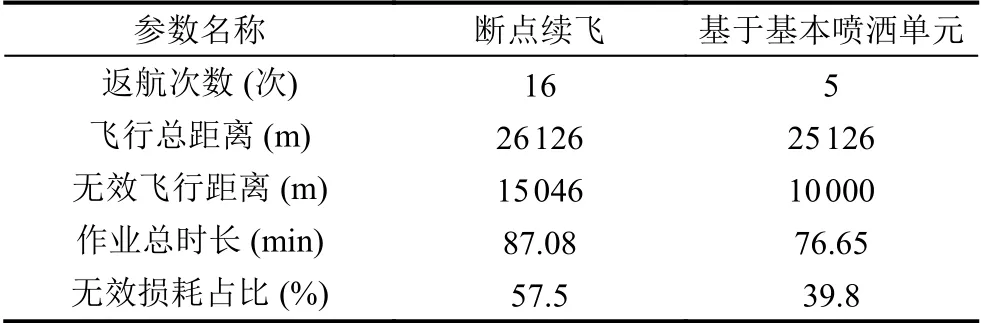
表1 相同初始条件下不同规划方法的仿真结果
经过对比仿真实验,测得两种情况下UAH 中途返航点规划情况如图6所示,图6(a)为基于断点续飞的规划方法,图6(b)为基于基本喷洒单元的规划方法.某时刻UAH 执行基本喷洒单元任务情况,如图7所示.根据实际仿真条件,这里采用矩形平移式植保作业模式构建基本喷洒单元,UAH 从起降点出发,以1 0 m/s的速度全速飞行,农田短边处转弯不喷洒作业.通过上述植保航线优化方法的实现和仿真结果可以得出如下分析:在相同初始条件下,后者中飞机的返航次数较少,飞行总距离和无效飞行距离相差较小,主要原因是补给点固定,难以进行再优化统筹安排.后者作业总时长相较于前者较短,无效能源损耗是前者的69.2%,大大降低了能源的浪费,提高了植保飞行效率.

图6 不同方法作业航线飞行中途返航点规划情况

图7 作业航线飞行的仿真结果图
4 结论
针对农业植保区域的喷洒作业问题,本文提出一种基于最小喷洒单元的作业航线优化分割方法,能够有效提高植保作业的效率,给无人直升机航空植保提供合理解决思路.通过仿真验证了该方法的有效性,具有一定的工程研究价值,主要得到以下结论:
(1)根据特定飞机的各方面性能得到基本喷洒单元的参数,将大田块划分为若干MSU,能够把握整个植保作业全过程,包括飞行时间、返航次数、药量等;
(2)基于MSU 单元的植保区域优化分割方法适用于未来高标准农田的建设,具有一定的工程实践价值.