基于履带车设计的大学生创新能力培养
2022-05-09吴志东刘美奇何雪冬闫少康庄福坤陈艳伟
吴志东,刘美奇,何雪冬,闫少康,庄福坤,陈艳伟
基于履带车设计的大学生创新能力培养
吴志东1,2,刘美奇1,何雪冬1,闫少康1,庄福坤1,陈艳伟1
(1.齐齐哈尔大学 机电工程学院,黑龙江 齐齐哈尔 161006;2. 黑龙江省智能制造装备产业化协同创新中心,黑龙江 齐齐哈尔 161006)
为提升大学生创新设计能力,以履带车设计为例,探究机电系统创新设计能力培养方法.根据机电系统组成要素,制定履带车设计方案,通过结构设计、数学建模、仿真与测试验证系统可行性.履带车采用电机驱动,传动机构使用蜗轮蜗杆减速器,控制系统以80C51单片机为核心,并扩展驱动模块和蓝牙无线通信模块,实现PWM调速和手机端无线控制功能.测试结果显示,履带车最大负载300 kg,调速稳定,行驶速度可达0.6 m/s.实践表明,学生可以通过实践项目掌握理论知识和提升专业技能.
机电系统;履带车设计;创新能力;项目实践
学生创新能力的培养经常受到学生知识水平、实验条件、实践环境等因素的限制,导致学生未能系统地掌握创新设计方法[1-2].将专业理论知识与实践指导相结合,以工程案例或项目为依托,对学生进行系统化指导更有助于学生创新思维的培养和创新能力的提升[3-4].机电系统设计作为机械电子工程专业大学生必备能力,是从系统工程角度出发,融合多领域、多学科技术,培养具有系统分析和顶层设计能力的综合型人才,符合目前自动化装备、机器人等领域的需求[5-6].履带车作为典型的机电系统,其设计和制造涉及到
机械设计、自动化控制、电路设计等专业知识,广泛应用于农业、工业和工程建设[7].高地隙液压履带车可以用于高秆作物种植需求,采用单片机控制系统可以有效实现履带车的自动化控制[8].三角式履带车具有较好的越障能力和稳定性,并具有较大的承载力,适用于环境恶劣的路面[9].结构建模、动力分析对履带车的性能影响较大[10].履带车爬坡速度较慢,电机驱动状态下,实时调速则是保证履带车稳定运行的重要条件[11].本文以三角履带车设计为项目案例,融合结构设计、建模分析和自动控制等理论知识,充分利用“黑龙江智能机床研究院”和“智能制造装备产业化协同创新中心”的平台优势,综合锻炼学生创新设计能力,探究机电系统创新设计能力培养方法,有助于高等学校培养创新人才.
1 方案设计
根据机电系统组成要素为控制器、传感器、动力源、执行部件和机械本体,履带车设计方案由超声波避障传感器、控制单元、直流电机、减速器、履带、车体组成(见图1).锂电池组进行供电,通过电源转换模块将48 V电源转换至5 V为各电气控制部分供电.
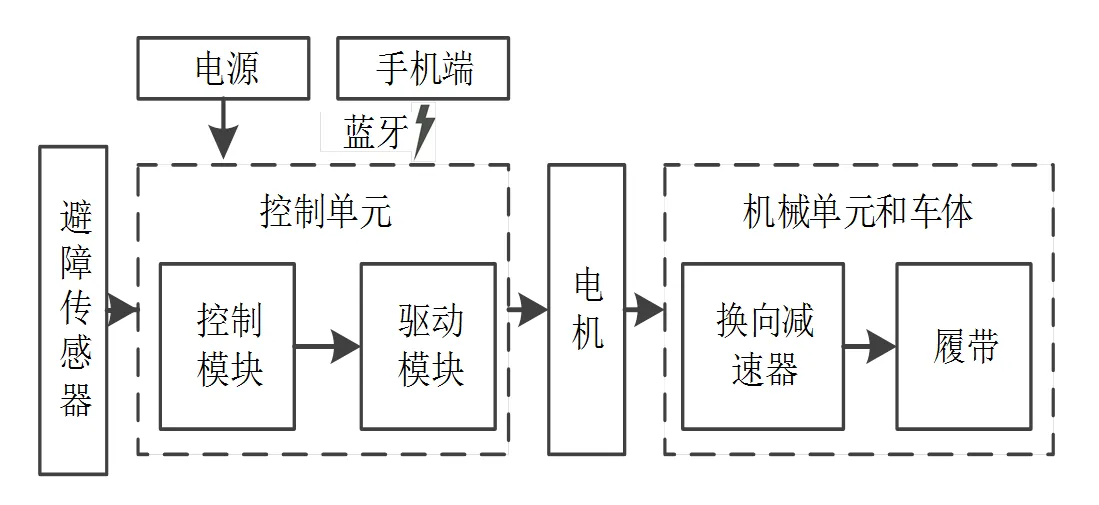
图1 设计方案
1.1 主体结构设计
履带车采用三角橡胶履带轮行走机构,具有稳定性高、通过性好、接地比压小、对地面破坏小[12-13]等优点.履带轮采用三角型履带轮,负重可达300 kg(其中,车自重100 kg,负载200 kg).履带轮由驱动轮、固定支架、导向轮、张紧轮、履带组成.为节省空间,直流电机卧式放置,采用带有换向的传动机构,从而使输出转速降低,提升转矩,驱动履带轮动作.主体结构见图2.
1.2 控制单元设计
控制单元主要由89C51单片机控制模块和驱动模块组成,89C51单片机控制模块负责数据的处理、指令接收与发送,外部扩展HC-05蓝牙通信模块,Tx(数据发送端)和Rx(数据接收端)分别于单片机RXD(串口接收端)和TXD(串口发送端)实现手机端远程控制功能;采用双HC-SR04超声波测距传感器,Trig(控制端)和 Echo(接收端)分别与单片机INT0(中断0)和INT1(中断1)相连接,前后均可以实现测距避障.控制模块与外围电路接口见图3.
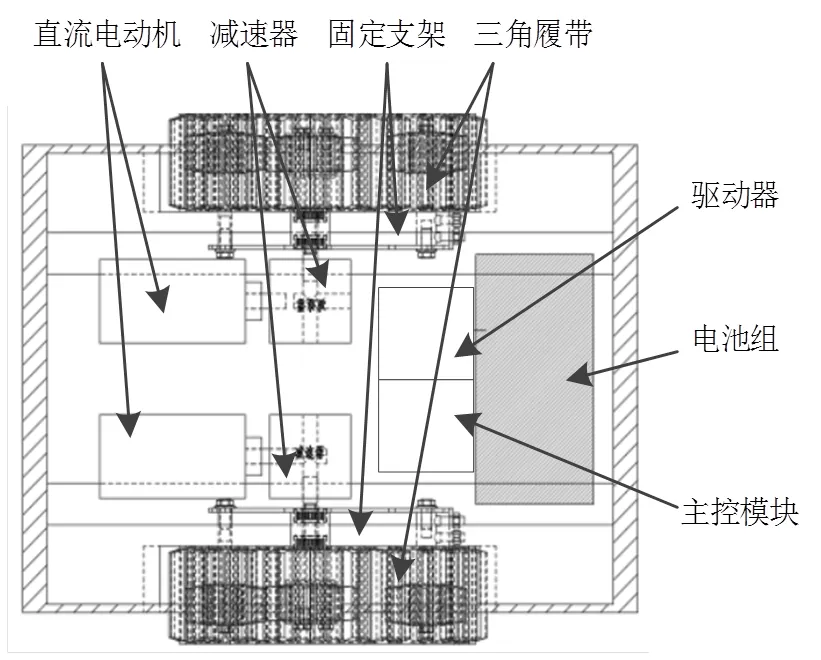
图2 主体结构
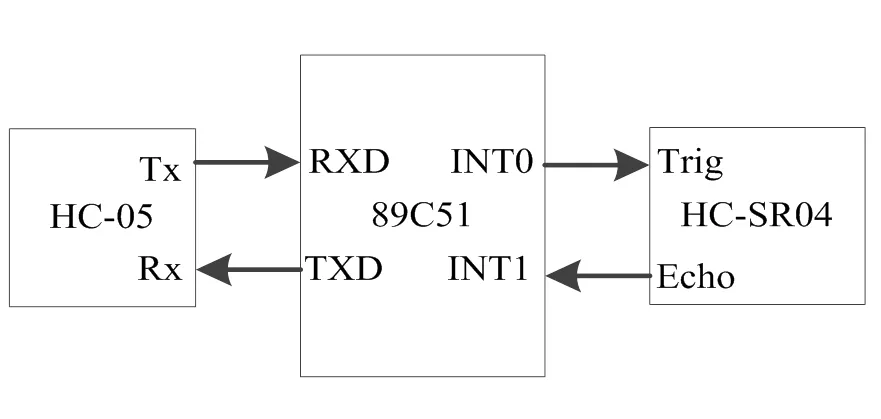
图3 电路接口示意图
2 相关理论分析及仿真
2.1 模型建立及分析
为了保证履带车具有足够牵引力,需对履带车牵引力进行计算与分析[14].履带车物理模型见图4.
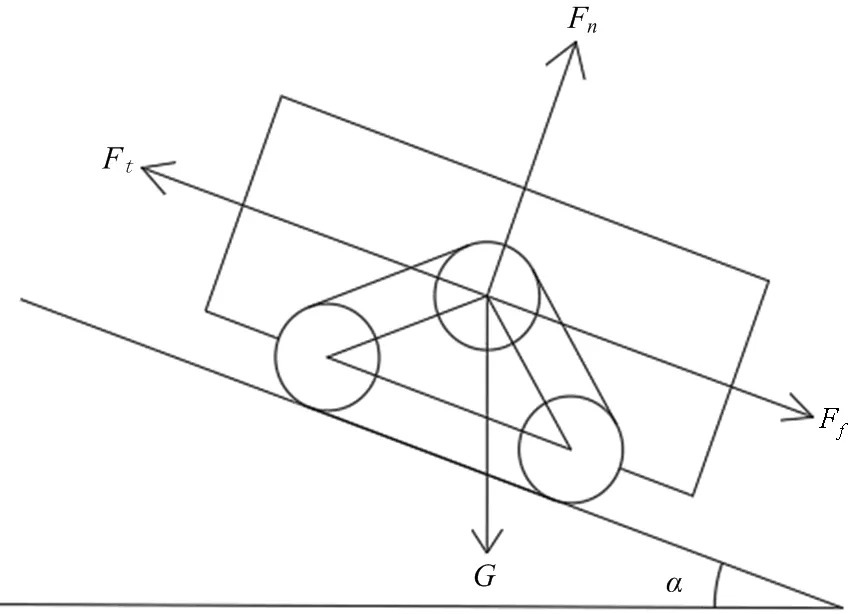
图4 履带车物理模型

即

2.2 电动机主要参数计算及选型

2.3 传动比计算及传动机构选型
机械传动示意图见图5.电机作为动力源,其输出转速高、转矩低,需经过机械传动机构,转换为低转速、高转矩,用以驱动负载.

图5 机械传动示意图


2.4 PWM调速方法及仿真
履带车电动机调速采用脉宽调制PWM(Pulse Width Modulation)技术,该技术具有高可靠性、易实现、低成本等优点,广泛应用于直流电动机调速[16-17].PWM其原理是利用大功率晶体管的开关作用,将直流电压转换成一定频率的方波脉冲,将其加在直流电动机的电枢上,通过对方波脉冲宽度的控制,改变作用在电枢端电压平均值,从而达到调速的目的.
利用Proteus软件建立直流电动机调速电路模型(见图6),采用线性桥式放大电路作为电动机驱动电路,主要由Q1~Q4功率管组成;D1~D2为二极管,可以防止电动机快速变化时产生的自感电势和反电势击穿晶体管.89C51单片机P0.0接口为PWM控制信号输出端,用于控制电动机调速;P0.1接口为正、反控制信号输出端,用于控制电动机转动方向.
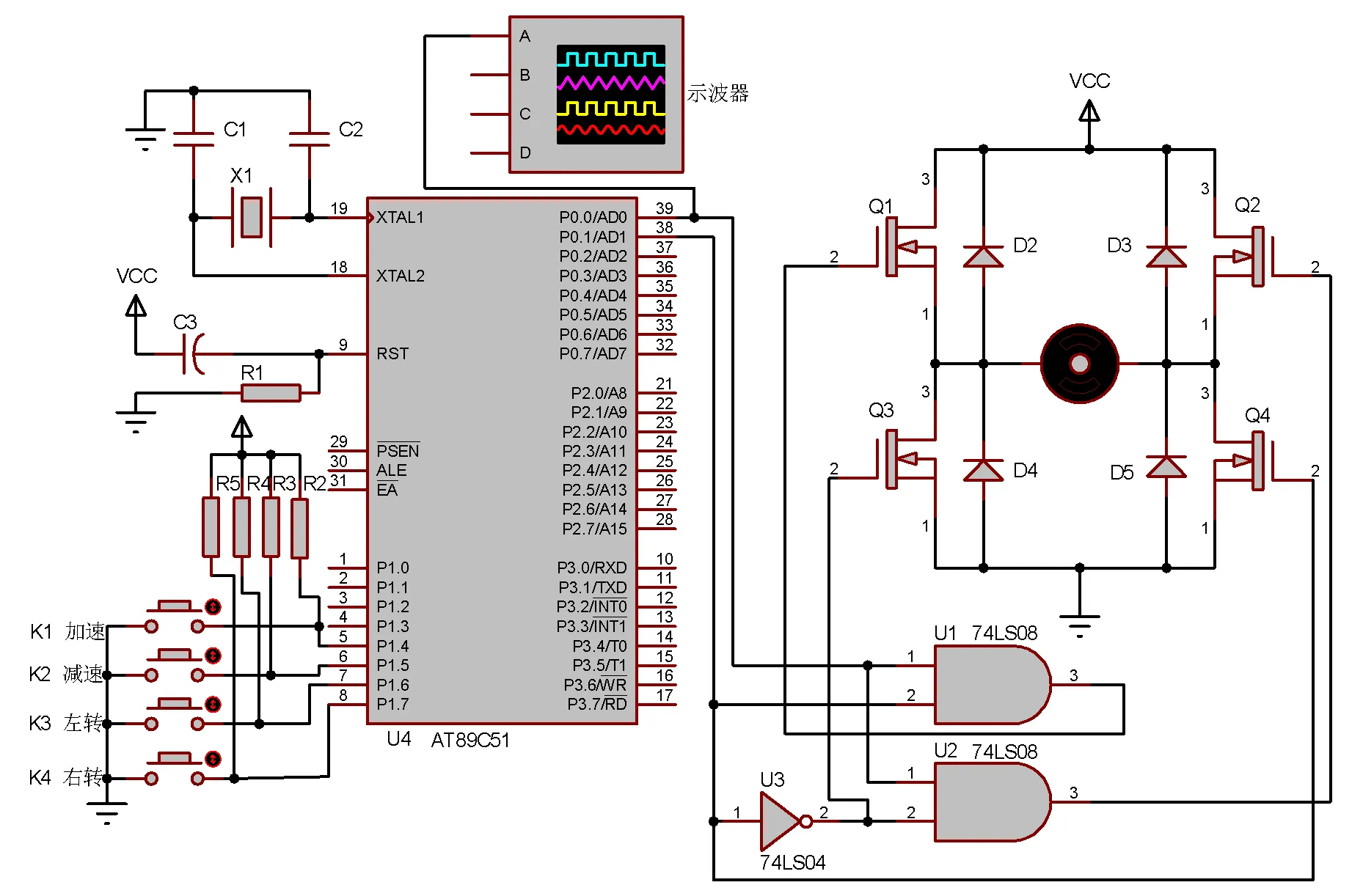
图6 直流电动机调速模型
利用Proteus软件中示波器模块监测PWM控制波形,模型仿真开始,按下K1键,脉冲宽度增大,电动机转速升高;按下K2键的输入,脉冲宽度减小,电动机转速降低.PWM波形显示见图7.
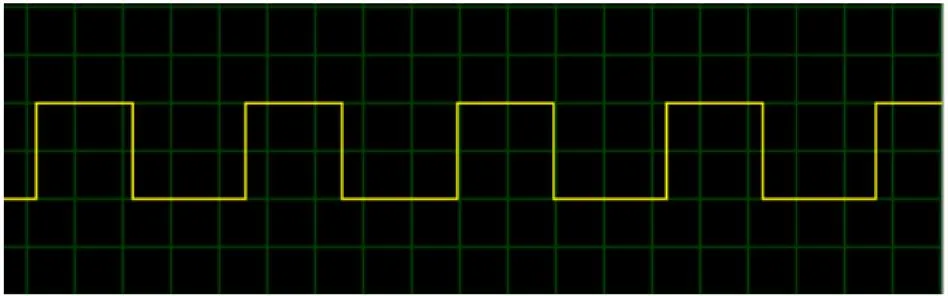
图7 PWM波形
3 测试及结果
对履带车进行组装与调试,实物见图8.车体长1.2 m,宽1.0 m,高0.35 m.测试过程中履带车负载可达300 kg,行驶速度可达0.6 m/s,并可顺利驶过倾斜角为10°的斜坡.
手机控制端界面见图9.在按下“左转”按钮时,“Tx”处显示“2 B/s”,表明数据发送成功,主控单元HC-05蓝牙通信模块信号灯变亮,表明指令接收成功,履带车按照指令左转.履带车按照指令手机端输入指令运行,且行驶稳定.

图8 履带车实物

图9 手机端控制界面
4 结语
基于履带车方案设计,通过理论分析、建模仿真以及装置测试等环节的实践,学生掌握了机电系统创新设计方法,并完成实物测试,手机端通过蓝牙无线控制履带车行驶,调速稳定,行驶速度可达0.6 m/s,履带车最大负载为250 kg.通过“履带车”项目的实践成果,说明以项目驱动教学的方法可以有效培养学生创新设计的能力.
[1] 张莹莹,冯铎,李志豪,等.以“大学生创新创业训练计划”为导向的物理专业实验教学改革与实践[J].实验室研究 与探索,2020,39(11):180-182,237.
[2] 王瞡瑶,金炳尧.实验室开放运行体系的建构及实践[J].实验室研究与探索,2015,34(8):147-150.
[3] 杨军,乔林珂,贾肖静,等.大学生技术装备研发能力培养探索与实践[J].实验室研究与探索,2020,39(5):132-135.
[4] 杨连生,王甲男,黄雪娜.体验式学习对大学生创新创业能力的影响研究[J].现代教育管理,2020(12):102-107.
[5] 胡红生,曹坚,周斌斌.应用型地方高校机电一体化系统设计课程群产教协同的课堂教学模式改革[J].实验室研究与 探索,2018,37(6):212-217.
[6] 李卫,张军昌,黄玉祥,等.“机电一体化系统设计”实践环节教学改革[J].实验技术与管理,2016,33(11):216-218.
[7] 崔志超,管春松,陈永生,等.温室用小型多功能电动履带式作业平台设计[J].农业工程学报,2019,35(9):48-57.
[8] 朱晨辉,李连豪,王万章,等.高地隙液压履带车自动行走控制系统设计与试验[J].农业机械学报,2018,49(增刊1): 456-462,469.
[9] 刘泽旭,王立海,刘铁男,等.多功能集材机三角履带主参数确定[J].森林工程,2014,30(1):5.
[10] 张金铮,王琪,金琦淳,等.基于ADAMS的三角履带机构动力学仿真分析[J].江苏科技大学学报(自然科学版), 2019,33(2):56-61.
[11] 刘泽旭,王立海,孙天用,等.轮式与三角履带式集材机的爬坡性能比较[J].林业科技开发,2014,28(6):79-83.
[12] 李娜,周进,张华,等.三角橡胶履带轮技术发展现状及分析[J].中国农机化学报,2019,40(11):209-219.
[13] 潘晓春,姚凯.履带轮转换技术设计研究[J].机电产品开发与创新,2012,25(4):33-35.
[14] 张广晖,许明贤,孟庆凯,等.三角履带轮式森林消防车设计与分析[J].消防科学与技术,2019,38(7):983-987.
[15] 王云飞.电控液驱重载AGV设计研究[D].济南:山东大学,2020.
[16] 王春凤,李旭春,薛文轩.PWM直流调速系统实验的教学实践[J].实验室研究与探索,2012,31(8):32-34,49.
[17] 高蕾娜,喻洪平,刘飞,等.“电机控制技术与应用”实验教学实践研究:以逻辑无环流直流调速系统为例[J].教育 与教学研究,2017,31(2):115-119.
Innovation ability training of college students based on the design of tracked vehicle
WU Zhidong1,2,LIU Meiqi1,HE Xuedong1,YAN Shaokang1,ZHUANG Fukun1,CHEN Yanwei1
(1. School of Mechanical and Electronic Engineering,Qiqihar University,Qiqihar 161006,China;2. Collaborative Innovation Center of Intelligent Manufacturing Equipment Industrialization of Heilongjiang Province,Qiqihar 161006,China)
In order to improve the innovative design ability of college students,taking the design of tracked vehicle as an example,the cultivation method of electromechanical system innovation design ability was explored.According to the components of the electromechanical system,the design scheme of the tracked vehicle was formulated,and through structural design,mathematical modeling,simulation and testing,the feasibility of the system has been verified.The tracked vehicle was driven by motors,the worm gear reducer was used in transmission mechanism,the control system was based on 80C51 microcontroller,the driver module and bluetooth wireless communication module were applied to realize PWM speed regulation and wireless control function of mobile phone,to achieve functions of PWM speed regulation and mobile wireless control.The test results showed that the maximum load of the tracked vehicle was 250 kg,the speed was stable,and the driving speed can reach 0.6 m/s.Practice showed that students can master theoretical knowledge and improve professional skills through practical projects.
electromechanical system;design of tracked vehicle;innovation ability;project practice
1007-9831(2022)04-0088-05
TH213.7∶G642.0
A
10.3969/j.issn.1007-9831.2022.04.018
2021-10-21
黑龙江省教育科学“十三五”规划2020年度重点课题(GJB1320388);2020年齐齐哈尔大学教育科学研究项目(GJZRYB202006);大学生创新创业训练计划项目(202110232233);黑龙江省教育厅省属高等学校基本科研业务费科研项目(135509411,135409102)
吴志东(1985-),男,黑龙江齐齐哈尔人,讲师,博士,从事环境智能调控、自动化系统研究.E-mail:wzd139446@163.co