基于多项式模型的非线性滑模变结构控制
2022-05-09王为徐凤霞
王为,徐凤霞
基于多项式模型的非线性滑模变结构控制
王为1,徐凤霞2
(1. 新疆大学 机械工程学院,新疆 乌鲁木齐 830046;2. 齐齐哈尔大学 机电工程学院,黑龙江 齐齐哈尔 161006)
基于非线性对象的多项式模型,设计新型滑模变结构控制系统.建立滑模观测器对系统的建模不确定部分进行动态观测,抑制建模不确定性对系统的影响,减小抖振.设计自适应趋近律,提高系统的收敛速度.分析系统的稳定性和收敛性,证明滑模观测器和自适应趋近律的收敛性.应用仿真验证所提出的控制方法的有效性.
多项式模型;建模不确定性;滑模观测器;自适应趋近律
随着非线性系统的广泛应用,对系统的稳定性、控制精度的要求越来越高,获得一个通用且精确的非线性系统模型尤为重要[1].采用多项式非线性建模法最大的优点是模型精度损失小,且可以将线性系统的控制方法直接应用于非线性系统的控制中.目前,非线控制系统提出了自适应、极点配置、神经网络等设计方法,文献[2]提出了一种基于barrier Lyapunov函数的自适应神经网络非奇异快速终端滑模控制方法,这样模糊系统参数的不确定性界就可以自动调整.文献[3]利用神经网络对未知系统动力学进行估计,并利用附加的鲁棒项对包括未知外部扰动和神经网络逼近误差在内的复合扰动进行衰减,但是这要求系统的输出和系统中的不确定性要足够光滑.Ren[4]等设计了扰动观测器来估计难以测量的复杂微振动,观测具有一定的局限性.本文基于多项式非线性模型,设计滑模观测器对系统的建模不确定部分进行动态的观测,提出将新型滑模变结构理论应用于多项式模型的非线性系统的方法.
1 非线性控制系统设计
1.1 非线性多项式模型
非线性模型采用多项式形式,表达式为
1.2 非线性系统结构

图1 基于非线性多项式的滑模变结构控制
1.3 滑模控制器设计
为了便于计算,系统采用线性滑模面,表述为




1.4 滑模观测器设计


2 稳定性分析
2.1 系统稳定性及收敛性分析
可以分3种情况讨论:

2.2 滑模观测器收敛性证明

由公式(3)(4)(8)可得



3 仿真
仿真1 针对焊接温度控制系统进行控制,其数学模型为

式中:;;;;;;;;;;;和的初值分别为5,20;高斯噪声为;;.仿真结果见图2~3.
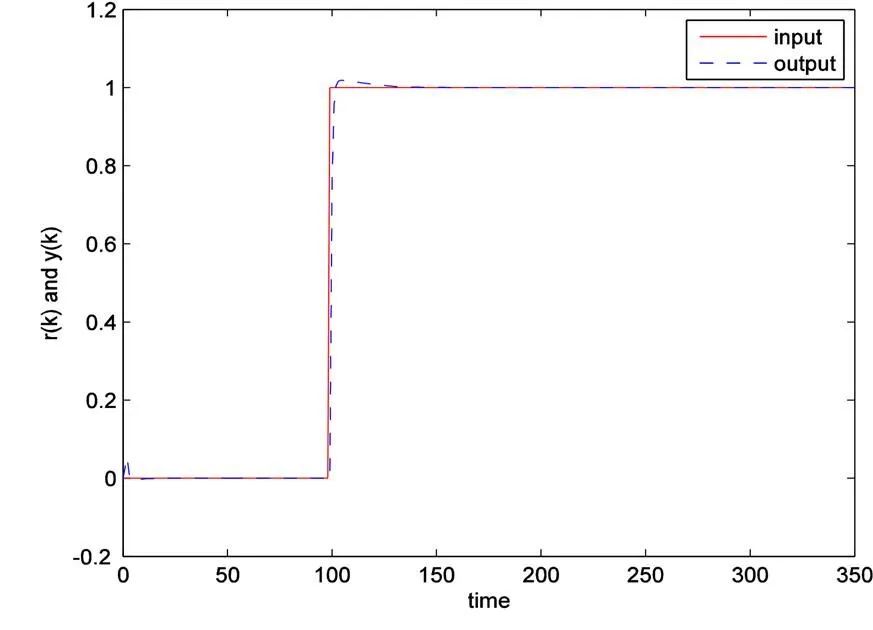
图3 减小初值后的跟踪曲线
仿真2 可以代表一类非线性系统的Hammerstein模型[5]

式中:;;;;;高斯噪声;;.仿真结果见图4~7.
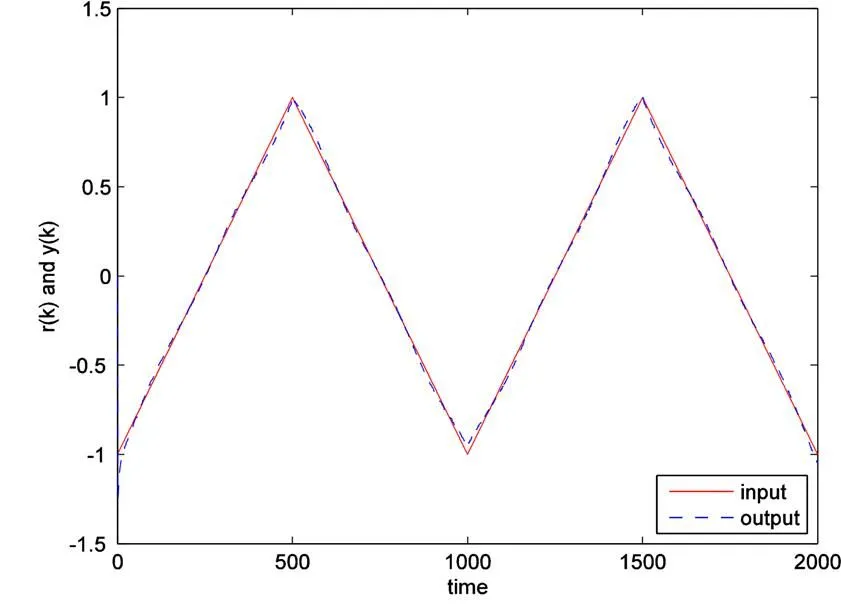
图5 新型滑模控制器跟踪曲线

图6 传统系统抖振
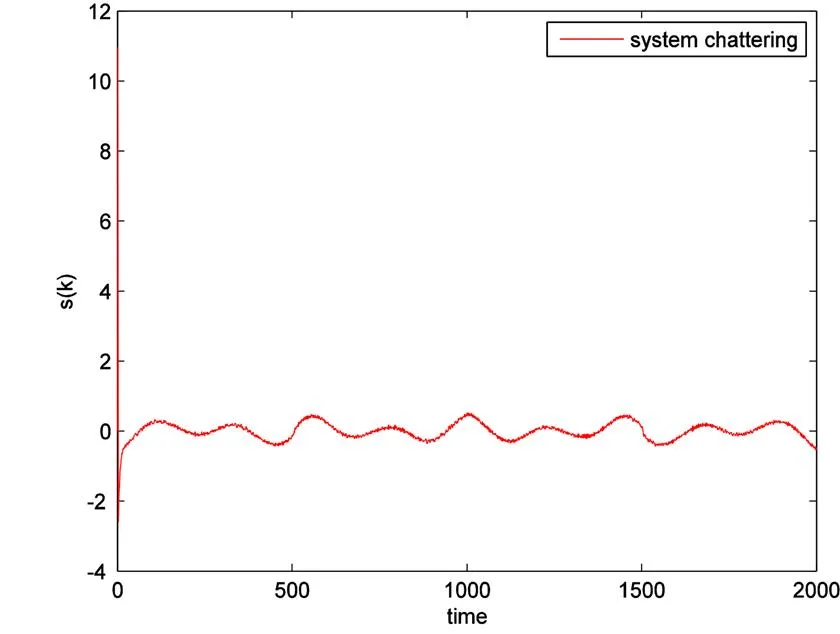
图7 新型系统抖振
图4为采用传统滑模观测器时的位置跟踪曲线,图5为应用新型滑模控制器时的位置跟踪曲线,图6和图7为采用不同方法时的系统抖振.由仿真曲线可以看出,本文设计的滑模控制器和滑模观测器可以使系统的输出很好地跟踪系统的输入.系统运动到滑模面的时间非常短,而且稳定在滑模面上的抖振幅度非常小.
4 结论
本文提出了一种基于多项式模型的滑模变结构控制系统设计方法,能够很好地解决含有建模不确定性的非线性动态系统的控制问题.系统的收敛速度快、输入求解简单、抖振小.滑模观测器对系统中存在的建模不确定性有很好的观测效果,抑制了其对系统的影响,效果优于传统的滑模观测器.基于自适应趋近律的滑模控制器既能使系统平稳、快速地趋近滑模面,又保证了系统的抖振收敛到最小,使系统的控制指标达到要求.由自适应趋近律和滑模观测器的收敛性证明了系统的稳定性.仿真结果验证了所设计的控制系统可以很好地抑制未知界的建模不确定性及干扰对非线性离散系统的影响,具有一定的应用价值.同时,应用基于非线性多项式的离散滑模变结构方法为研究设计高精度的非线性控制系统提供了理论基础.
[1] Xu Fengxia,Zhu Q,Zhao D,et al.U-model based design methods for nonlinear control systems a survey of the development in the 1st decade[J].Control and Decision,2013,28(7):961-977.
[2] Li S,He P,Nguang S K,et al.Barrier Function-Based Adaptive Neuro Network Sliding Mode Vibration Control for Flexible Double-Clamped Beams with Input Saturation[J].IEEE Access,2020(99):1.
[3] Wang Y,Chen G.Robust composite adaptive neural network control for air management system of PEM fuel cell based on high-gain observer[J].Neural Computing and Applications,2020,32(14):10229-10243.
[4] Ren Y,Chen X,Cai Y,et al.Adaptive robust sliding mode simultaneous control of spacecraft attitude and micro-vibration based on magnetically suspended control and sensitive gyro[J].Proceedings of the Institution of Mechanical Engineers Part G Journal of Aerospace Engineering,2020(15):2197-2210.
[5] Zhao W X,Chen H F.Adaptive tracking and recursive identification for Hammer-stein systems[J].Automatica,2009,45(12): 2773-2783.
Nonlinear sliding mode variable structure control based on polynomial model
WANG Wei1,XU Fengxia2
(1. School of Mechanical Engineering,Xinjiang University,Urumqi 830046,China;School of Mechanics and Electronics Engineering,Qiqihar University,Qiqihar 161006,China)
The new type of sliding mode variable structure control system is designed based on the polynomial model of the nonlinear objects. The establishment of a sliding mode observer for dynamic observation of the modeling uncertainty of the system,suppresses the impact of modeling uncertainty on the system,and reduces the shake. Design adaptive reaching law to improve the convergence speed of the system. Analyze the stability and convergence of the system,prove the convergence of the slidingmode observer and adaptive approach law. Application simulation verificates the effectiveness of the control method proposed.
polynomial model;modeling uncertainty;slidingmode observer;adaptive reaching law
1007-9831(2022)04-0035-06
TP273
A
10.3969/j.issn.1007-9831.2022.04.007
2021-12-10
新疆大学2019年度自治区级大学生创新训练计划项目(S201910755146)
王为(2000-),男,黑龙江齐齐哈尔人,在读本科生.E-mail:2547079481@qq.com
徐凤霞(1970-),女,黑龙江哈尔滨人,教授,博士,从事网络控制研究.E-mail:xufengxia_hit@163.com