基于物联网的自动化监测系统在地质灾害监测中的应用
2022-05-09孙泽信段举举张安银
孙泽信, 段举举, 张安银
(江苏省地质工程勘察院,江苏南京210012)
0 引 言
随着社会经济的不断发展,资源开发的力度逐渐增大,给本就脆弱的地质环境造成了巨大的影响,地质灾害的频度和规模日趋增加(黄健,2012;陈万利,2014;许强等,2019;宋国梁,2021)。人为破坏和自然变迁是地质灾害产生的主要原因,地质灾害形态包括滑坡、泥石流、崩塌、地面塌陷、地面沉降和地裂缝等(苟敏,2009),严重影响国家经济建设,危害人民的生命财产安全。
地质灾害监测作为地灾安全防控的重要手段越来越受到重视,监测工作的实施不仅可以对地质灾害进行预警,而且可为地质灾害工程安全治理措施提供可靠的决策依据,避免恶性地质灾害的发生(亓星,2019)。
传统的地质灾害监测采用人工监测,受限于环境特点,工作效率低、投入大、监测成本和安全风险高,监测成果的可靠性、准确性和信息反馈的及时性受外界条件影响很大,监测工作缺乏较强的针对性,很难做到预警信息的及时反馈(张娟等,2020)。随着物联网技术的快速发展,地质灾害监测技术的智能化、自动化得到了较好的发展和应用。GNSS技术、倾斜摄影测量技术、航空遥感技术、多平台激光雷达技术、智能传感技术等多种自动化监测技术手段在地质灾害监测中的应用也愈加广泛(谢慧芬,2011;何朝阳等,2014;吕宝雄等,2017;乔辉等,2018;王慧敏等,2020;蔡田露等,2021;徐文风,2021)。
在现有监测技术的基础上,综合考虑监测成本、监测精度、实施效果、信息反馈时效性等因素,融合多种自动化监测技术手段,建立一种基于物联网的地质灾害自动化监测系统,并通过实例验证该系统的有效性。
1 系统设计
1.1 系统架构
物联网通过互联网将各种信息传感设备进行连接,按照约定的协议或规则,实现信息交换、通信、共享等功能。基于物联网的地质灾害监测系统主要包含信息采集感知层、数据传输网络层和成果使用应用层(图1)。
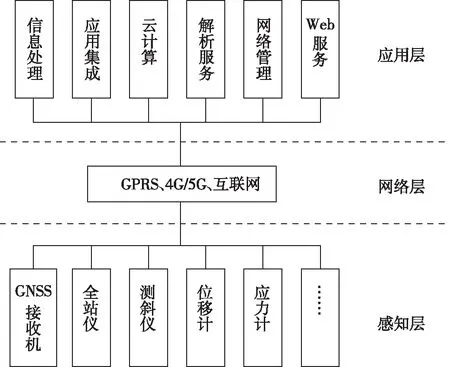
图1 物联网的监测系统架构Fig. 1 Monitoring system architecture for the Internet of Things
1.1.1 信息采集感知层 实现对外部动态信息的智能化识别、获取和处理,通过数据传输网络层将外部实体连接到成果使用应用层。包括自动化测量设备和传感器,用于实现各类变形监测信息的实时采集。
(1)自动化测量设备包括GNSS接收机和智能全站仪。GNSS参考站接收机和流动站接收机同步对卫星进行观测,通过无线通信模块将观测数据实时传输至控制中心;智能全站仪能够自动进行测量目标的识别和观测,获取角度和距离数据,通过GeoCOM接口技术,实现用户与全站仪之间的数据通信。
(2)传感器有倾角仪、位移计、应力计、水位计、渗压计、雨量计、裂缝计、气象传感器等,可根据监测项目的需求选择相应种类的传感器,根据现场情况采用电源或太阳能进行供电。
1.1.2 数据传输网络层 数据传输网络层主要实现感知层所采集的数据及外部指令的远程发送和接收,通过GPRS、4G/5G、互联网等进行通信,实现观测数据从传感器到控制中心的网络传输。
1.1.3 成果使用应用层 包括软硬件设施应用和各种基于物联网的成果应用。软硬件为成果使用提供数据传输、接收、处理、输出等基础设施及数据调用接口。地质灾害自动化监测系统应用层为监测管理云平台系统,采用B/S架构,可实时获取各监测传感器采集的数据,具有数据的自动化解析、处理、存储、查询、展示等功能。
1.2 系统组成
为实现地质灾害的自动化监测功能,地质灾害监测系统包括远程数据采集系统、数据传输系统、数据分析处理系统、数据成果展示系统(图2)。
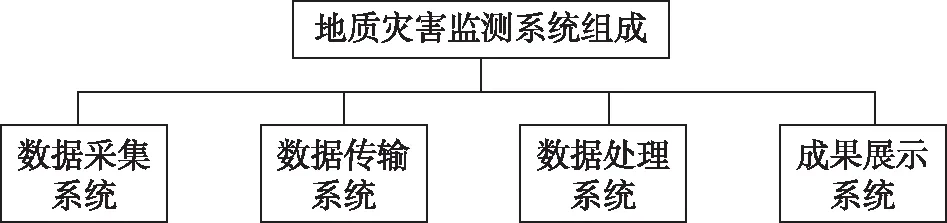
图2 地质灾害监测系统Fig. 2 Geological disaster monitoring system
(1)数据采集系统。由自动化测量设备和岩土类传感器组成,通过远程命令控制数据采集仪进行原始观测数据的采集。
(2)数据传输系统。将数据采集仪采集的各类传感器数据通过网络实时传输至数据处理系统。
(3)数据处理系统。主要用于对地质灾害监测原始数据的分析与过程数据的处理,具有对监测数据进行处理、分析、存储等各项功能,出现数据异常时能及时预警或上报相关信息。
(4)成果展示系统。为监测系统的成果输出和展示平台,可通过相关客户端实时输出、查看、查询、浏览监测结果和报警信息等情况。
2 自动化监测关键技术
2.1 GNSS自动化监测
2.1.1 工作原理 GNSS自动化监测是基于卫星载波相位观测的实时动态差分技术,用于获取监测点在特定坐标系中的实时三维信息。基本原理:在远离变形区域的稳固位置选择一个参考站,在变形体上布设若干个监测站,在参考站和监测站上分别安装GNSS天线用于对卫星信号的同步接收,对所采集信号进行实时数据处理,从而获得监测站的实时三维坐标。
2.1.2 监测方法 根据项目的特点,选择合适位置作为参考站和监测站,位置的选择应便于观测,高度角≥15°的范围内无遮挡物,监测点附近不应有强烈反射和干扰卫星信号的物体。通过无线传输将参考站和监测站的观测数据实时传输至系统服务器,数据处理系统进行实时处理,从而获得监测站的竖向和水平位移变化情况。
2.2 智能全站仪自动化监测
2.2.1 工作原理 全站仪三维数据采集控制系统通过手机网络和互联网通信技术实现对全站仪的远程自动化控制,进行各监测点坐标信息的采集、传输、分析与粗差剔除、处理、存储与备份,以此获取变形体的三维坐标信息,并与初始坐标数据进行比对分析,以获得水平及竖向位移的绝对变化量,可实现变形体表面水平位移和竖向位移的自动化监测。
2.2.2 监测方法 采用测量机器人在变形体周边合适位置制作强制对中观测墩,在观测墩上放置全站仪。基准点设置在变形体周边相对稳定区域,一般≥5个。监测点按要求布设若干监测小棱镜,组成监测网。
根据项目特点,全站仪自动化监测采用单台仪器或多台仪器进行组网监测。首次监测时采用人工监测对各基准点、监测点进行学习测量,获取各基准点和监测点的初始状态数据。后续数据采集监测过程中,由全站仪三维数据采集控制系统控制仪器,获取测站到各基准点和监测点间的几何要素。监测完成后,自动进行基准点稳定性判定分析,剔除不稳定或精度较差的点位,最后进行监测网平差得到各监测点的三维坐标。通过与初始状态数据进行比较,获得各监测点的位移变化信息。
2.3 滑动式倾斜自动化监测
2.3.1 工作原理 通过滑动式自动倾角仪实现。在测斜管管口固定1台步进电机,在测斜管内放置1个倾斜传感器,通过程序自动控制电机提升传感器,按固定间距进行数据采集,通过无线通信模块自动获取倾角传感器所在位置的倾斜角变化量,进而换算成各个深度位移的水平观测值。
2.3.2 监测方法 根据上述工作原理,需在每个测斜孔固定1台自动滑动倾角仪,测出不同深度位置的倾斜角θi,计算出该深度位置的横向偏差Δd:
Δd=Lsinθi
(1)
式(1)中,L为量测段长度。各深度处的水平位置d为:
d=∑Lsinθi
(2)
与初始值相减即得到各深度点位的深部水平位移。
2.4 多源传感器自动化监测
2.4.1 工作原理 通过布设不同类型的传感器实现应力应变、水位、雨量、裂缝等自动化监测。根据监测项目的不同选择对应类型的传感器,监测传感器包括裂缝计、液位计、渗压计、应变计、雨量计、土壤含水率计等。每次监测时,自动化采集仪通过采集监测传感器数据的变化,基于无线通信技术将获取的数据传输至数据处理系统,然后根据相应公式计算出对应的监测数据。
2.4.2 监测方法 根据地质灾害的类别选择合适的传感器,将所有的传感器接入数据采集终端,集成为一个基于无线远程通信的传感器数据采集系统。设定采样时间间隔,通过客户端远程控制自动采集传感器信息,从而实时采集各监测点的数据信息。
3 监测实施及数据分析
3.1 监测设计
以某边坡监测为例,坡面倾角为40°~50°,边坡体长约60 m,宽约100 m,由于该边坡紧邻某文物建筑,为保护文物需在治理前进行跟踪监测以确定治理方案。根据要求对边坡外观形变、深部位移、地下水位等地质灾害影响因素进行监测,其中,外观形变观测包括边坡表面竖向位移、水平位移,深部位移包括边坡岩土体深层水平位移,其他影响因素主要为降水量。
考虑到监测工作量大、频率高、条件复杂、指标多等因素,采用全自动化监测技术进行监测,布点及指标见图3。

图3 监测设计示意图1-监测基准点;2-监测工作基准点;3-水平、竖向位移监测点;4-深层位移监测点;5-地下水位监测点;6-降水量监测点Fig. 3 Layout plan of the monitoring design
表面水平及竖向位移监测采用GNSS接收机和全站仪,深部位移监测采用滑动式倾角仪,地下水位监测采用水位传感器,降雨量监测采用雨量计,所有监测均采用自动化监测并辅以人工定期检核(表1)。

表1 监测传感器类型及数量Table 1 Type and number of monitoring sensors
自动化采集频率为:监测第1个月3次/d,雨季期间4次/d,其余期间1次/d。人工校核频率为15天1次,监测周期为1年。
3.2 监测工作实施
数据采集子系统包括GNSS接收机、全站仪、倾角仪、雨量计,通过传感器进行数据采集。通过5G网络建立传感器和服务器之间的通信链接,将传感器数据实时传输到控制中心服务器。数据处理子系统将采集到的数据进行粗差剔除和平差处理,从而实时获取各监测点的变化情况。最后将监测成果在监测管理云平台系统中进行展示,并将相关监测信息即时发送至相应权限的管理人员,从而达到自动监测、自动预警的目的。
3.3 监测数据分析
对监测周期内365天的监测数据进行分析,具体如下。
3.3.1 降雨量数据分析 月降雨量统计结果(图4)显示,2个自动化监测点的年累计降雨量分别为965.6、953.9 mm,人工监测点年累计降雨量为977.4 mm,自动化监测与人工监测月降雨量数据吻合,年累计降雨量基本吻合,表明自动化雨量采集装置可靠。
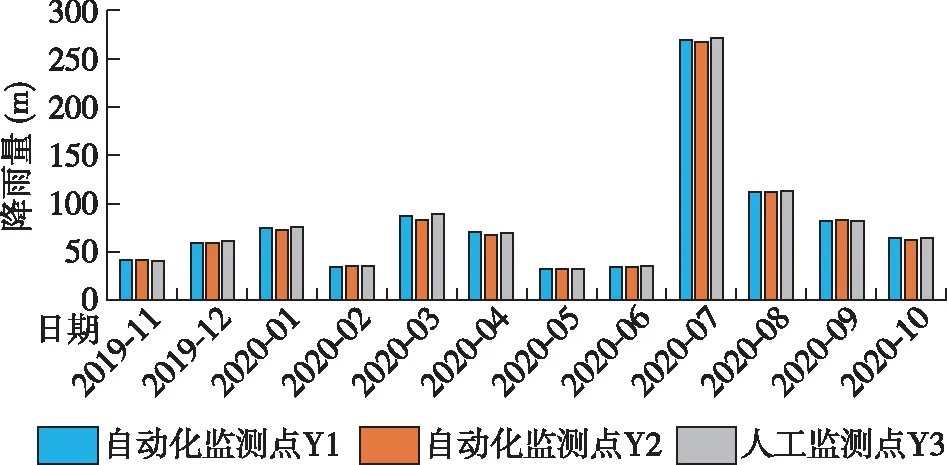
图4 月降雨量统计图Fig. 4 Histogram of monthly rainfall
3.3.2 地表位移监测数据分析 通过GNSS和全站仪对边坡地表位移进行监测,以平行于滑坡底为X方向,垂直于滑坡底向下为Y方向。为节约监测成本,仅对S1、S3监测点进行GNSS和全站仪同步监测,其余监测点均采用全站仪进行自动化监测。根据全站仪自动化监测数据统计结果,各监测点X、Y、H方向的累计变化量分别为-1.1~1.2、1.3~3.6、-3.1~-1.7 mm,表明该边坡整体较为稳定。
分析GNSS监测数据与人工监测数据可知,X、Y、H方向最大误差分别为±3.50、±2.01、±3.60 cm,最小误差分别为±1.30、±0.40、±0.70 cm。图5显示,CNSS监测精度为厘米级,更适合大区域地质灾害自动化监测。
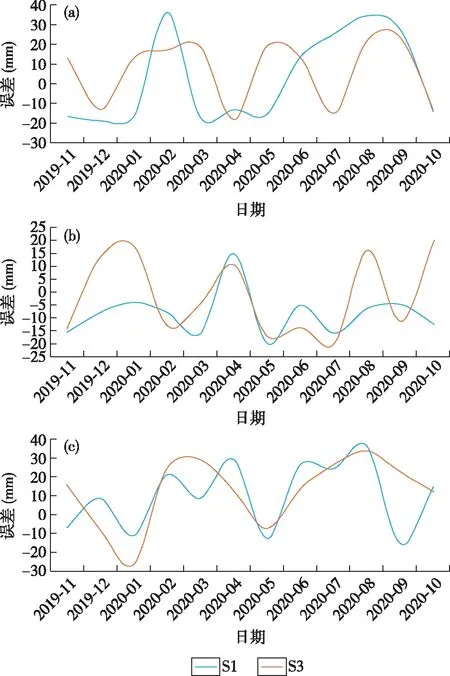
图5 GNSS监测与人工监测差值(a) X方向;(b) Y方向;(c) H方向Fig. 5 Differences between GNSS monitoring and manunal monitoring(a) X direction; (b) Y direction; (c) H direction
对比S2、S5、S10监测点的全站仪三维自动化监测数据与人工监测数据可知:X、Y、H方向最大误差分别为±1.2、±1.4、±1.7 mm,最小误差分别为±0.1、±0.1、±0.4 mm。图6显示,全站仪水平位移监测数据误差多在±1.0 mm以内,竖向位移偏差多在±1.5 mm以内,表明该全站仪自动化监测系统水平位移监测精度优于±1.0 mm,竖向位移监测精度优于±1.5 mm,更适合小区域高精度表面位移监测。

图6 全站仪自动化监测与人工监测差值(a) X方向;(b) Y方向;(c) H方向Fig. 6 Difference between automatic total station and manual monitoring(a) X direction; (b) Y direction; (c) H direction
3.3.3 深部位移监测数据分析 深部位移的计算以孔底为起算基准,以对应位置的深部位移监测点CX2、CX5为例,对自动化监测数据与同阶段的人工监测数据(图7)进行比对分析发现,各深度位置的自动化监测阶段的水平位移累计变化量与人工监测阶段的累计变化量相比,误差最大为±2.5 mm,最小为0 mm,自动化监测位移曲线与人工监测数据吻合良好,表明滑动式倾角仪自动化监测系统能够满足地质灾害深部位移监测精度及时效性要求。

图7 深部位移自动化监测与人工监测阶段累计变化量差值Fig. 7 Cumulative variation differences between automatic and manual monitoring of deep displacement of monitoring sites CX2(a) and CX5(b)
4 结 论
(1)通过对比GNSS自动化监测数据与人工监测数据发现,该系统监测精度为厘米级,适合于大范围的地质灾害表面位移监测;全站仪自动化监测系统精度为毫米级,适用于小范围地质灾害的高精度表面位移监测。二者均可以较好地提高监测效率和信息反馈的时效性。
(2)滑动式自动倾角仪的应用及其数据分析表明,该系统能较好地实现深部位移的远程自动化监测,具有较高的精度和稳定性,解决了传统自动化监测成本高的问题。
(3)比较雨量自动化采集装置的应用与人工采集数据发现,二者吻合良好,较好地验证了多源传感器自动化监测技术的适用性和可靠性。
(4)该系统的应用实现了对地质灾害由点到面、由表及里、多指标、全方位的自动化监测数据的采集、传输、分析和处理、存储与备份、查询、信息反馈及预警报送,形成了较为完备的地质灾害自动化监测系统,具有较高的应用及推广价值。
