老旧渔船检验技术优化研究
2022-05-09张茂松
张茂松
(东营市垦利区海洋发展和渔业局,山东 东营 257500)
0 引言
目前阶段,随着我国科技的发展与各个领域技术的进步,给部分行业带来了活力,尤其是渔业的发展,更是发生了翻天覆地的变化[1]。其实,经过研究可以发现,我国从事渔业的船舶特点相对较为明显,一般情况下是以小、多、旧为主,因此渔业日常的生产危险性以及突发事件应变性均较高,这在一定程度上对于渔船质量的也会产生相应的影响,并且直接关系到渔民的生命财产安全[2]。所以,对于老旧渔船的检验工作需要更加严谨、灵活[3]。其实,我国传统的老旧渔船检验一般是以隐患故障排除的方式进行的,虽然可以完成预期的检修目标,但是在实际应用的过程中,时常会出现检测误差以及故障等问题,对于最终的检测结果造成极为严重的影响,同时也会降低检测的可靠性与全面性[4]。
因此,在上述背景之下,需要对老旧渔船检验技术作出优化,结合实际的优化需求,设定更为灵活、具体的优化目标,实现更好的应用效果[5]。
1 老旧渔船检验技术优化探析
1.1 一帧检验目标设立
在对老旧渔船检验技术进行优化之前,首先需要进行检验目标的设定。传统上对于老旧渔船的检验通常采用验证检验的形式,利用专业的扫描工具和设备提取老旧渔船的应用异常以及故障,同时,整合出相应的特征,以此来完成对渔船的检验与维修[6]。这种方式虽然可以完成预期的检验目标,但是在实际应用的过程中,仍然会发生相应的测试误差与缺陷,对于最终的检验结果造成消极影响。
结合实际情况,需要构建更加稳定的检验环节,优化技术[7]。首要的环节便是一帧检测目标的设定。所谓一帧检测目标,主要指的是老旧渔船在检验的过程中,存在的可变帧数目标,在常规检验的背景环境之下,可以先设定相应的检验标准时限,同时,确保人员检测的精度为85%以上,结合DPM算法,进行一帧综合检验时间的核定与计算,具体如公式(1)所示:
式中:U表示一帧综合检验时间,a表示预设检测效率,ℵ表示变动系数。通过上述计算,最终可以得出实际的一帧综合检验时间[8]。根据得出的老旧渔船检验时间,结合所设定的一帧检验标准,进行相对应的检验目标的设立,为后续工作奠定基础。
1.2 多维检验结构建立
在完成对一帧检验目标的设立之后,需要进行多维检验结构的建立。根据上述设立的一帧检验目标,建立基础的多维处理检验,同时,结合初始的检验技术,构建深度特征层级检验。这部分的检验不同于传统的检验,划定为多层级的多维目标检验。
根据实际的检验需求与情况,进行YOLOv2训练检测环节的测定。同时,将一帧检验图像进行缩放,结合深度神经处理技术,划定为卷积层、池化层以及传输层。每一个层级均需要设定一个特征维度检验目标,同时,考虑到检验结构的稳定性与特殊性,需要核定测算出具体的多维置信度,具体如下公式(2)所示:

式中:T表示多维置信度,φ表示预设训练系数,m表示维度检测距离,ϑ表示实测传输层级常数,通过上述计算,最终可以得出实际的多维置信度。在每一个检验层级之上,设定具体的检验维度,同时,设定检验训练架构,结合得出的池化特征,进行具体的多维检验定位,对于老旧渔船所需要检验的位置进行测定,进而调整相应的检验多维目标,最终完成对多维检验结构的设计与建立。
1.3 交并比双向检验模型设计
在完成对多维检验结构的建立之后,接下来,结合实际的老旧渔船情况,设计交并比双向检验模型,以此来提升整体的检验效果与质量水平。在初始的检验架构之中,设定双向的检验范围,这两部分同时进行检验。同时,结合变化的置信度,设定具体的聚类检验预测交并比,所谓预测交并比,主要指的是预测检验结果与实际检测结果存在的误差比值。将所建设的检测目标与结构添加在交并比双向检验模型之中,随后,划定聚类中心,考虑到检验模型的复杂度以及聚类层级,可以设定具体的Anchor检验参数对比,具体如表1所示。

表1 Anchor检验参数对比表
根据表1可以完成对Anchor检验参数对比的测定。利用交并比的变化与置信度变化,进行相关流程的更改与调整,在双向检验的结构之中,划定核心的聚类目标,将PCA聚类中心降维后设定在检验模型之中,最终完成对3交并比双向检验模型的设计。
1.4 DPM检验优化矩阵构建
在完成对交并比双向检验模型的设计之后,接下来,需要构建DPM检验优化矩阵。可以先依据嵌入式的模型架构,建立检验的边缘矩阵,计算出边缘检验系数,具体如下式:

式中:G表示边缘检验系数,μ表示检验差值,D表示聚类优化比。通过上述计算,最终可以得出实际的边缘检验系数,根据边缘检测系数,设定具体的DPM检验优化矩阵,并确定具体的检验范围。同时,在实际优化的过程中,结合DPM检验矩阵的处理方式,设定应变检验标准,添加在矩阵之中,形成更为灵活的检验距离,最终完成对DPM检验优化矩阵的构建。
1.5 Radarsat-2识别法完成对老旧渔船检验技术优化
在完成对DPM检验优化矩阵的构建之后,需要采用Radarsat-2识别法完成对老旧渔船检验技术优化。可以先利用交并比双向检验模型获取老旧渔船的基础检验情况,同时,在所设定的优化矩阵之中,构建变化检验程序,需要注意的是,每一个检验程序均需要设定具体的识别检验目标。
同时与DPM检验矩阵关联的同时,设定多维度的识别流程,采用Radarsat-2识别法对渔船的外部形象以及内部故障作出检验,在此基础之上,构建Radarsat-2的检验背景峰值,此时得出的检验结果具有较高的精准度与可靠性,对于测定的区域作出双向分割,另外,结合模型的构建,计算出双阈值,以此来进一步优化完善检验的具体标准模式,最终采用Radarsat-2识别法完成对老旧渔船检验技术优化。
2 实例分析
2.1 A县老旧渔船检验现状
A县位于我国沿海地区,渔业发展相对较好,同时,对于渔船的制作与使用也相对较多。最近几年,由于我国渔业资源的持续衰退,再加上海洋生物的过度捕捞,使得海洋捕捞业的经济效益极不稳定,同时,部分渔民的渔船也遭到了废弃。不仅如此,还存在一些其他的问题,一些渔船早已经十分老旧,不具备原本的应用价值,但是渔民依旧投入使用,这在一定程度上也埋下了安全隐患,对于渔民的生命安全造成较大的威胁。相对应的老旧渔船检验工作也是十分敷衍,甚至部分渔民对于老旧渔船从未作出相应的检验,这也是A县近几年来海上事故频发的关键影响因素之一。
除此之外,A县的老旧渔船检验还存在其他的问题,其一是柴油机问题,检验工作的核心便是柴油机,这主要是因为柴油机是老旧渔船的主要动力,同时也影响着渔船的行驶速度。一些老旧渔船的柴油机处于老龄甚至超龄的状态,接近使用的极限值。同时,一些零件由于常年不报修,也无法完成预期的应用效力。部分的检验人员由于工作不严谨,可能无法预料上述问题,造成A县老旧渔船的检验无法达到预期的效果。
对比于柴油机的老龄甚至超龄问题,渔船电气起火、航行信号故障也是检测的核心工作。海上作业实际上的危险系数是相对较高的,同时,在高压、高强度的背景之下,电气起火会造成电路的超负荷,同时,在高压的背景之下,设备过热也极容易形成安全隐患,不利于老旧渔船的检验与维护,对于渔船的稳定性也会造成影响,造成糟糕的应用现状。
2.2 A县老旧渔船检验实例验证
根据上述所分析的A县渔船检验工作现状,接下来,结合实际的情况,作出更加详细的老旧渔船检验实例验证。首先,在初始的背景环境之下,结合检验的要求,设定老旧渔船的检验可变差值,具体如下式(4)所示:

式中:K表示检验可变差值,表示应变综合比,β表示初始检验系数。通过上述计算,最终可以完成对检验可变差值的计算。
结合得出的检验可变差值,划定具体的检验范围,同时设定相对应的可变距离,应变检验范围的变化对于所维修的部分会产生一定的影响,同时在一定程度上也会提升整体的检验效果。在上述的背景环境,制定一系列的检验流程与处理环节,在初始的处理架构之中,结合调查的问题,添加相应的维护方案,同时,采用嵌入式GPU技术,建立设定完整的检验标准。此时在完成技术优化之后,对老旧渔船的检测范围基本可以得到控制,同时,以比照的形式进行检验测定。可以从多个方面进行检验与测定。首先,从检验误差方面测验。选取1艘老旧渔船,采用相关的设备以及装置获取基础性质的数据信息,与标准作出对比,核定测算出具体的检验误差。同时,在上述的背景环境之下,还需要测定具体的检验总时长,如下:

式中:M表示检验总时长,e表示变化范围,κ表示检验权重变化值,ℜ表示并行化检测系数。通过上述计算,最终可以得出实际的检验总时长。接下来,对老旧渔船检验技术的实际测定验证结果作出分析与研究,具体如表2所示。
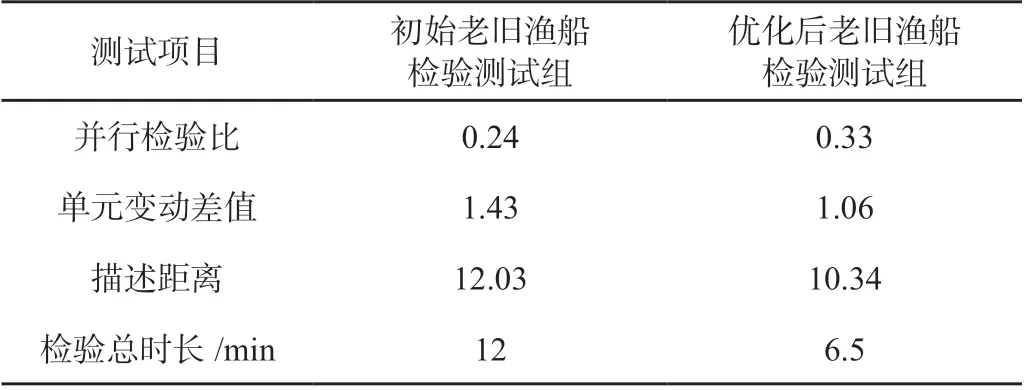
表2 实例分析结果对比分析表
3 结语
上述便是对老旧渔船检验技术的优化分析与研究。对比于初速的渔船应用技术,优化之后的检测技术相对更加灵活,对于检测的结果精准度更高,可靠性也更好。不仅如此,在复杂的检测环境之中,经过优化的检测技术可以第一时间定位出检测的核心目标,同时,从多个方向划定老旧渔船中存在的问题,以此为目标,制定具有针对性的解决方案。在老旧渔船的检验优化工作之中,要遵循规范化、法制化、高效化等原则,从根源上作出优化调整,同时,还需要确保渔船的正常应用与调节,促使渔船在完成维护修复之后,还可以处于适航状态,最大限度地降低渔船生产作业存在的风险,为渔船安全作业提供更加可靠的保障。