船舶侧推进器螺距零位的校准方法
2022-05-09张瑞强毛振东
张瑞强,毛振东
(中石化海洋石油工程有限公司,上海 201208)
1 侧推进器螺距反馈单元概况
1.1 组成结构
侧推进器螺距反馈单元通常由伺服油缸、连杆、球关节、液压软管、电位计连杆、电位计、螺距控制连杆等部件构成,如图1所示。

图1 侧推进器螺距反馈单元结构图
1.2 工作原理
侧推进器螺距反馈单元属于典型的闭环控制系统。所谓闭环控制系统就是控制系统的一种类型,具体内容是指,把控制系统输出量的一部分或全部,通过一定方法和装置反送回系统的输入端,然后将反馈信息与原输入信息进行比较,再将比较的结果施加于系统进行控制,避免系统偏离预定目标。闭环控制系统利用的是负反馈。即是由信号正向通路和反馈通路构成闭合回路的自动控制系统,又称反馈控制系统[1]。一个常见的闭环反馈控制系统的基本组成可以用图2所示的框图表示。
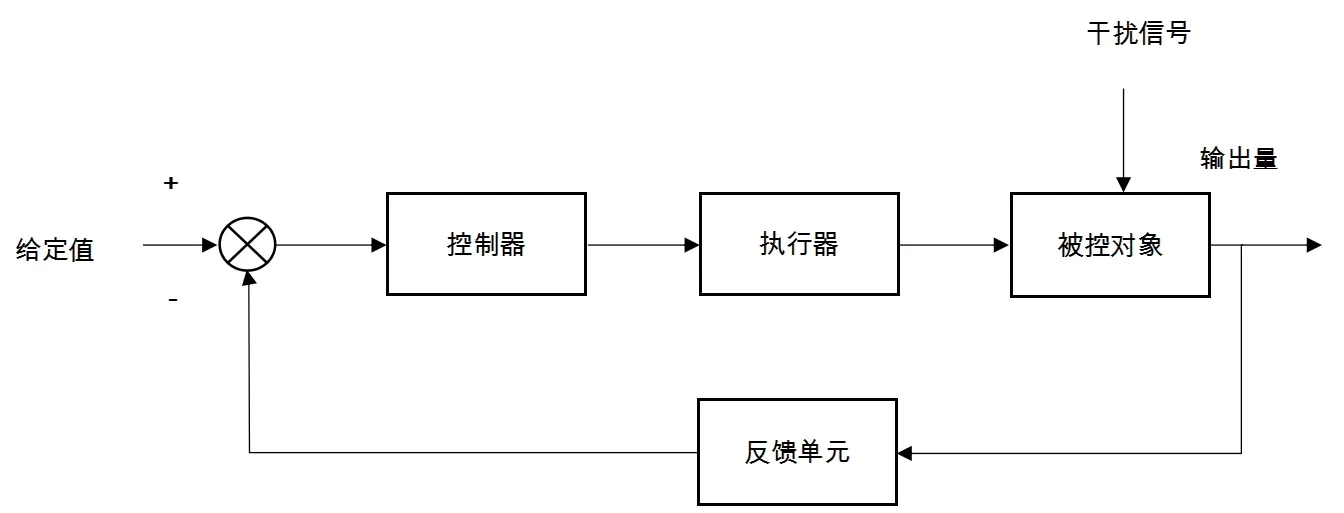
图2 闭环反馈控制系统基本组成框图
在图2中,给定值给出与期望输出对应的输入量;比较单元运算出给定值与反馈值的偏差,一般采用集成运算放大器(简称集成运放)来实现;控制器控制执行器,执行器直接驱动被控对象,使输出量发生变化,常被用作为执行器的有电动机、调节阀、液压马达等;反馈单元检测被控对象的输出量并转换为所需要的电信号。在控制系统中常用的有用于速度检测的测速发电机、光电编码盘等;用于位置与角度检测的旋转变压器、自整机等;用于电流检测的互感器及用于温度检测的热电偶等。这些检测装置一般都将被检测的物理量转换为相应的连续或离散的电压或电流信号[2]。
当操纵台通过操作手柄给出改变螺距的信号,该信号经控制板运算后输出24 V直流电压信号,电压信号控制伺服控制阀通断,液压油经由液压软管进入伺服油缸,推动活塞和油缸顶杆动作,油缸顶杆通过螺栓与螺距控制连杆相连,螺距控制连杆通过水下机械结构与侧推进器桨叶相连,油缸顶杆驱动螺距控制连杆左右移动,通过上述步骤实现了改变侧推进器螺距的目的。螺距反馈电位计经由电位计连杆、螺栓、连杆、球关节、螺栓等部件和螺距控制连杆相连,通过这一结构可以将螺距控制连杆的摆动角度即螺距变化幅度精确地转变成反馈电位计的转动角度。反馈电位计将角度变化转变成电阻阻值变化,让螺距变化幅度能够被精确测量。
在上述过程中,操纵手柄给出的信号是给定值,控制板属于控制器,伺服控制阀和伺服油缸等属于执行器,侧推进器的桨叶便是被控对象,螺距反馈电位计属于反馈单元,而桨叶的变化量正是输出量。由此可以确定侧推进器螺距反馈单元是一个典型的闭环控制系统。
2 如何确定螺距的实际零位(机械零位)
进行螺距零位调节之前,需要确定侧推进器的实际零位,即机械零位。通常有2种方法可以用来确定实际零位:最小电流法和目测法。
2.1 最小电流法
所谓最小电流法就是利用钳形电流表找到侧推进器运转时的最小工作电流,此时推进器桨叶正好在实际零位。具体步骤如下:首先根据说明书计算出侧推进器的最大工作电流,并以此选择钳形电流表的量程。以ULSTEIN 150 TV-A型侧推进器为例,其额定功率为590 kW,额定工作电压为440 V,功率因数(cosφ)取值0.8,三相电动机有功功率计算公式:


由此可以确定钳形电流表的量程应该选择大于或等于1000 A档;然后将侧推进器置于运转状态,将操作手柄放在零位,使用钳形电流表钳住侧推进器马达的任意一相电源线。先向右侧操纵手柄,每次移动1%螺距,移动5次左右即可,将手柄归0,再向左侧操纵手柄,方法同右侧。通过上述操作可以得到11个电流值数据,比对这组数据并找到最小值,该数值对应的螺距即是侧推进器的零位螺距。此时虽然找到了侧推进器的实际零位,但仍需重复一遍上述操作,当钳形电流表再次测量到最小电流值时,通知手柄操作人员保持手柄在当前位置。同时记录伺服油缸的当前状态,可以采用2种方法,一种是使用钢尺测量油缸顶杆的顶出长度,另外一种是标记螺距控制连杆自由端在地面上投影的位置。虽然使用钢尺测量油缸顶杆顶出长度这个方法精确度更高,但在校准螺距时需要2人配合才能完成,而螺距反馈单元位于侧推进器马达下方,周围空间狭小,很难容纳2个人同时工作,因此一般采用标记地面投影这种方法来记录侧推进器的实际零位。
2.2 目测法
所谓目测法,顾名思义就是使用眼睛直接观察侧推进器桨叶的位置。启动侧推进器的伺服油泵(不需要启动侧推进器马达),使螺距控制单元处于可用状态。在驾驶台操纵侧推手柄,调整侧推进器桨叶位置,直到桨叶上的零位标识和桨毂上的零位标识对齐。使用标记螺距控制杆自由端在地面投影这个方法记录此时伺服油缸的状态。该方法有较大的局限性,因为侧推进器位于水面以下,平时不可能使用肉眼直接观察,仅能在船舶进坞修理船身露出水面时使用。该方法可以直接观察到桨叶和桨毂上的刻度值,准确性高,在具备条件时推荐优先使用。
3 螺距零位校准过程
校准之前理解一个原理,这个原理可以使用公式简单表达,公式如下:

式中:给定量来自于操作手柄,反馈量来自于螺距反馈电位计,这两者的差值便是执行量。当操作手柄在零位即给定量为0时,螺旋桨桨叶却不在零位(机械零位未在零位),这意味着该闭环控制系统中的执行量不等于0。根据公式(2)可知,当给定量等于零而执行量不等于0时,那么反馈量一定不等于0。若要执行量也等于0,就要调整反馈量,即调节反馈电位计。
调节步骤如下: 1)启动侧推进器伺服油泵马达(禁止启动主马达),使侧推进器螺距操纵及反馈单元处于工作状态。2)打开反馈电位计保护盒,使反馈电位计及锁紧螺丝曝露出来,以方便调整反馈电位计。 3)找到地面上的实际零位标识,此时看到螺距控制连杆的自由端并未对齐实际零位标识。 4)松开反馈电位计的4颗固定螺丝,向任意方向缓慢转动反馈电位计,观察螺距控制连杆自由端的动作方向,反复调整,直至其与地面上的实际零位标识对齐。5)上紧固定反馈电位计的4颗螺丝,并将保护盒安装到位。
以上校准方法通用性强,几乎适用于所有使用电位计作为反馈单元的变距桨推进器的螺距零位校准。另外,在调节过程中有些情况要避免出现,例如转动电位计时不小心将其拔出,这时反馈量将不再改变,变成恒定值,这样会造成系统中始终存在执行量,也就意味着伺服油缸将会向着某个方向一直动作,极有可能对伺服油缸造成损坏。一旦出现这种情况,需要立即停掉伺服油泵马达,小心将反馈电位计装回原位,确认旋转齿轮啮合后再进行下面的操作。
4 螺距指示单元校准
ULSTEIN 150 TV-A型侧推进器的螺距指示单元通常由多块控制板、反馈电位计、螺距表等构成[3]。该系统中使用的反馈电位计是多层共轴电位计,第一层用于反馈螺距变化,第二层用于指示螺距变化,第三层备用。因其共轴,所以在调整螺距零位时用来指示螺距变化的第二层也会跟随改变。此时,虽然操作手柄指示螺距和桨叶实际螺距是一致的,但螺距表的指示是错误的,这就需要对螺距指示单元进行调整。
4.1 螺距控制板单元校准
1)找到控制板MEA403的2C针脚(pin)引出线,并在整个调整过程中使用万用表直流电压档测量其电压值。
2)将侧推进器操纵权限转至驾控台主面板,将操作手柄转至右舷满螺距位置,调整控制板MEB110上的P5滑动变阻器,直到万用表测量到+10 V电压;将操作手柄转至左舷满螺距位置,调整控制板MEB110上的P6滑动变阻器,直到万用表测量到-10 V电压。
3)将侧推进器操纵权限转至驾控台伺服面板,将操作手柄转至右舷满螺距位置,调整控制板MEB110上的P7滑动变阻器,直到万用表测量到+10 V电压;将操作手柄转至左舷满螺距位置,调整控制板MEB110上的P8滑动变阻器,直到万用表测量到-10 V电压。
4.2 螺距表校准
1台侧推进器通常包含3台螺距表:机旁螺距表、前操纵台螺距表以及后操纵台螺距表。螺距表的本质是直流电压表,它的工作原理是利用电流的磁效应,当线圈中有电流通过时,就会产生旋转力,而旋转力与扭簧之间达到一种平衡,指针就会指向某个读数。螺距表指针延伸末端有一个旋钮,叫做机械调零旋钮,用来进行机械调零。
当侧推进器操作手柄在零位,而螺距表指针不在0位时,便需要对螺距表进行调零操作。
首先使用万用表的直流电压档测量螺距表的输入电压是否是0 V。若输入电压为0,则需要进行机械调零操作,使用螺丝刀调整机械调零旋钮,直至指针指向零位即可;若输入电压不为0,则需进行上述4.1螺距控制板单元校准,调整至螺距表输入电压为0。然后继续观察螺距表指针是否在零位,若在零位则无需进行调零操作,若不在零位,调整机械零位旋钮使指针至零位即可。
以上便是ULSTEIN 150 TV-A型侧推进器螺距指示单元的校准过程。
5 结语
精准的螺距零位对保护侧推进器安全、延长侧推进器寿命具有重要意义,管理人员应定期对螺距反馈单元进行检查,确保设备安全可靠运行。除此之外,定期化验油样及时更换液压油,定期检查伺服油缸、反馈电位计的固定螺丝等措施同样重要,多措并举方能保证船舶侧推进器的工况处于理想状态,进而给船舶安全营运创造良好的设备环境。