基于PPK的机载LiDAR在大比例尺地形图测绘中的应用
2022-05-09胡锦荣刘涛李甜刘敏
胡锦荣,刘涛,李甜,刘敏
(1.武汉市测绘研究院,湖北 武汉 430022; 2.武汉海达数云技术有限公司,湖北 武汉 430205)
1 引 言
传统全站仪、RTK测量方式在地势复杂、植被茂密、交通不便等自然条件受限的区域进行地形测量具有效率低、周期长、成本高、碎部点采集密度有限、数据种类单一、作业安全风险高等特点[1]。三维激光扫描技术是一种非接触主动式快速获取物体表面三维密集点云的技术,目前已成为高时空分辨率三维对地观测的主要手段[2]。近年来,基于动态后处理差分技术(PPK)的低空旋翼无人机机载激光雷达(LiDAR)测量系统被广泛应用于大比例尺地形图测绘中。
2 机载LiDAR系统测量原理
三维激光扫描仪发射器发出一个激光脉冲信号,经物体表面漫反射后,沿几乎相同的路径反向传回到接收器,从而可以计算目标点P与扫描仪器中心的距离S,同时控制编码器同步测量每个激光脉冲横向和纵向扫描角度的观测值α和β,如图1所示。依据式(1)可得出目标点P的三维坐标[3]。
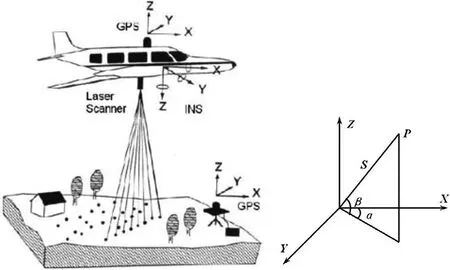
图1 机载激光系统对地定位原理
(1)
3 机载LiDAR系统地形图测绘应用
3.1 项目概况
测区位于重庆市东北部,地处大巴山弧形构造、川东褶皱带及川鄂湘黔隆褶带三大构造体系结合部。长江及其支流呈南北向强烈下切,地貌上呈深谷和中低山相间形态,地形起伏大、坡度陡。区内出露地层为沉积岩地层,岩层软硬相间,断裂构造十分发育,构造地质背景复杂。本项目选取测区南部沿江地区范围作为研究区域。
3.2 技术设计
根据本项目的地形条件决定采用多旋翼无人机搭载ARS-1000三维激光扫描仪,利用海达航线规划软件规划航线采集数据,原始数据经过POS解算和数据融合生成las格式的成果点云,在Terrasolid软件中进行去噪和分类,得到地面点的点云数据,生成最终的DEM成果和绘制等高线,分类完成的点云配合正射影像进行地物采集和编辑,包含建构筑物、地物和地形要素的图件经过整饰得到大比例尺地形图成果,生产技术路线如图2所示。
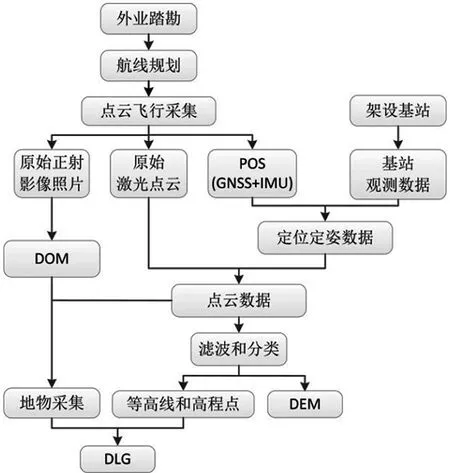
图2 机载LiDAR大比例尺地形图生产技术路线图
3.3 航飞采集
综合考虑测区高差、点云密度、机载激光雷达设备性能等因素,确定设备档位等参数和飞行高度(相对航高)。本项目选择起降点在山顶处,选用合适的挡位进行点云数据获取。航线规划如图3所示。
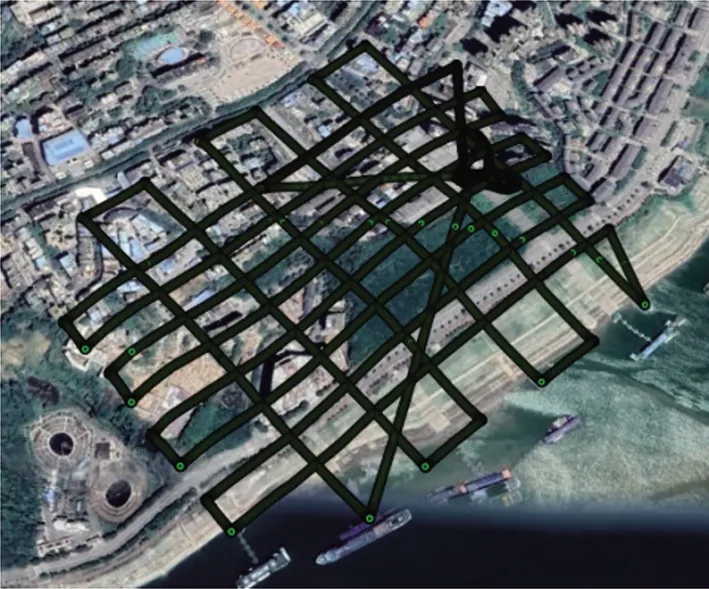
图3 本项目航线规划方案
3.4 后差分处理和正射拼接
运用Inertial Explorer软件进行PPK后差分解算POS数据,POS解算采用基站数据和移动站GPS数据+IMU数据组合解算,并输出点云融合阶段需要使用的高精度定位定姿数据[4]。POS解算操作主要包括基站数据预处理和轨迹解算两部分。基站数据预处理是将基站原始数据转换为相应格式,然后将移动站的数据与处理之后的基站数据进行组合解算,得到高精度定位定姿数据和航线轨迹如图4、图5所示,同时导出高精度相机照片的外方位元素。
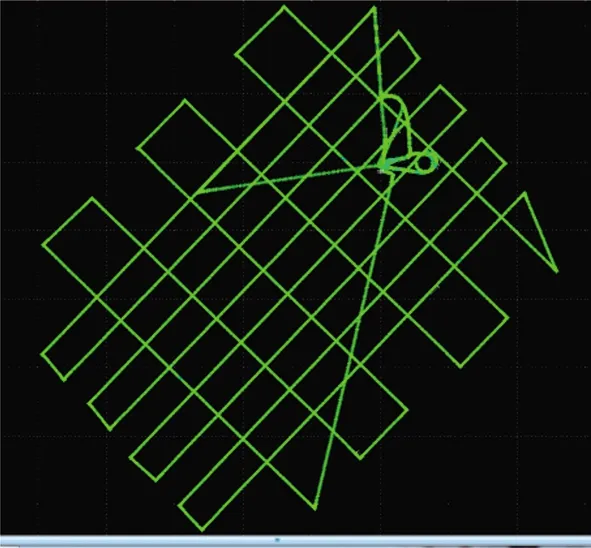
图4 航线轨迹后差分解算结果
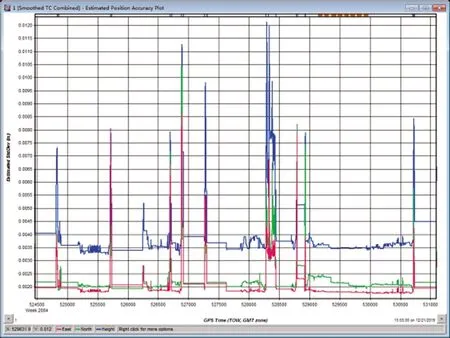
图5 后差分POS内符合精度结果
点云融合是将解算后的POS定位定姿数据与扫描仪原始数据经时间同步生成带有绝对坐标的点云数据,融合后生成的点云数据是后续进行点云滤波和分类的基础数据。融合生成的点云如图6、图7所示:
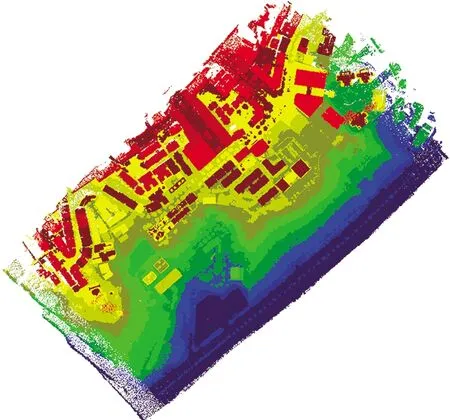
图6 按高程渲染显示
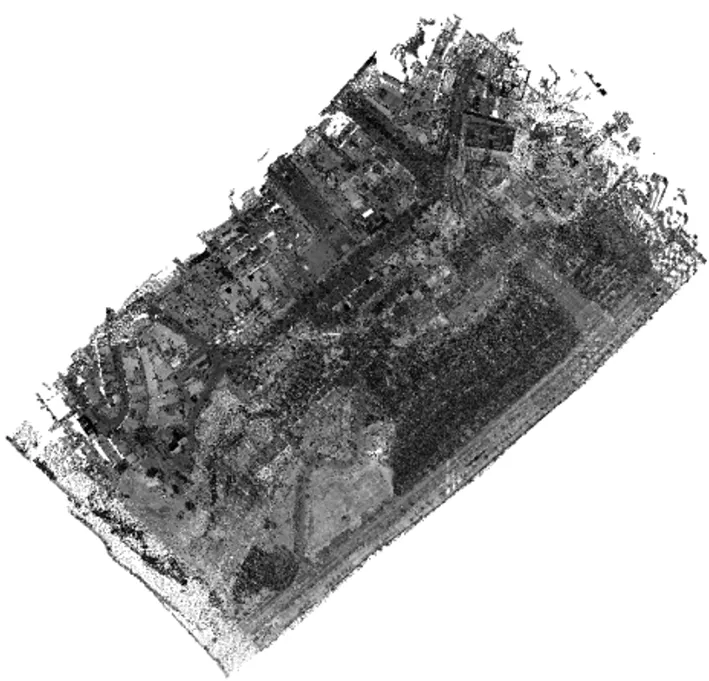
图7 按强度渲染显示
将原始影像导入Pix4dmapper软件,经过空三加密解算,勾选软件全自动生产DOM选项,软件运行特征点提取和匹配操作,拼接得到测区的正射影像图8所示,通过Global Mapper软件将点云进行正射影像纹理着色如图9所示:

图8 DOM成果
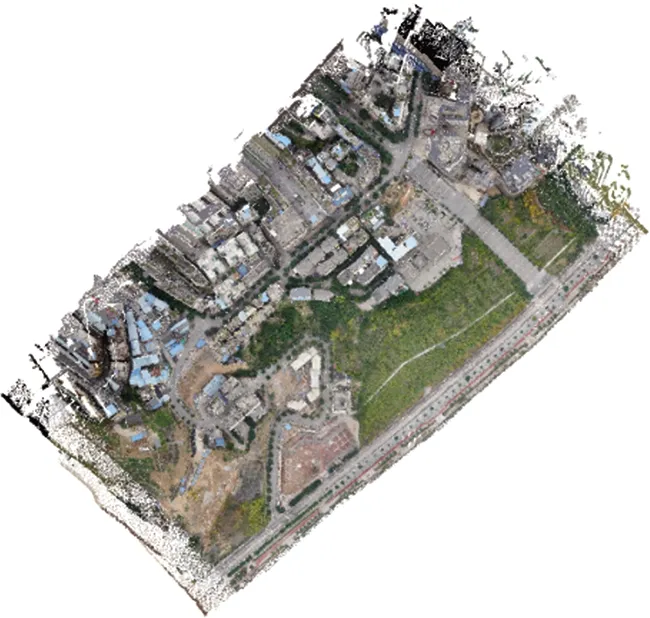
图9 点云影像着色效果
3.5 滤波分类
本项目采用TerraSolid软件对融合后的激光点云进行粗分类和精细分类处理。
首先利用滤波算法对点云数据进行滤波粗分类处理,剔除非地表数据,之后人工干预精细分类以获取准确纯地表点云数据。得到地面点点云如图10所示:

图10 地面点点云
3.6 生成DEM和等高线
基于地表点云数据,利用Terrasolid软件自动化生成DEM成果和等高线成果,分别如图11、图12所示。
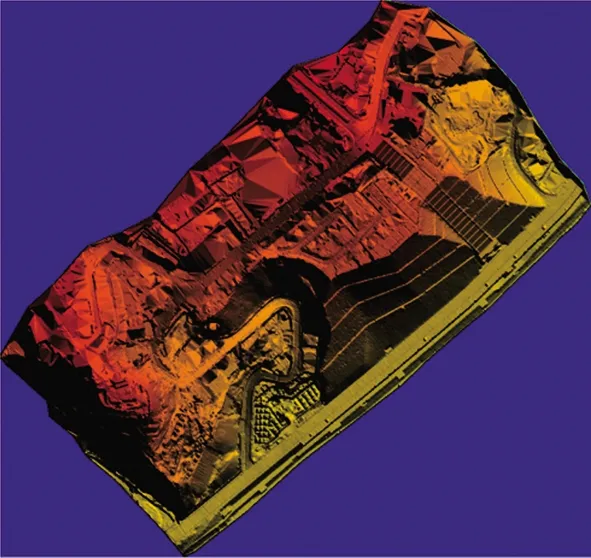
图11 DEM成果

图12 等高线
3.7 地物采编生成DLG
数字地形图中等高线以及高程点均从激光点云中获取,其余要素如水系、交通、植被土质等要素可由点云叠加DOM进行绘制。
测图软件基于真三维立体环境测图,支持点云数据、正射影像数据同步加载显示,在此基础上通过二三维窗口联动进行地物采集;对于某一墙体点云扫描不完整的情况,可以通过点云切片快速定位来使该面的点云显现出来便于绘图;对于不易捕捉的房角点,也可以采用线相交方式来绘制,采集界面如图13所示。
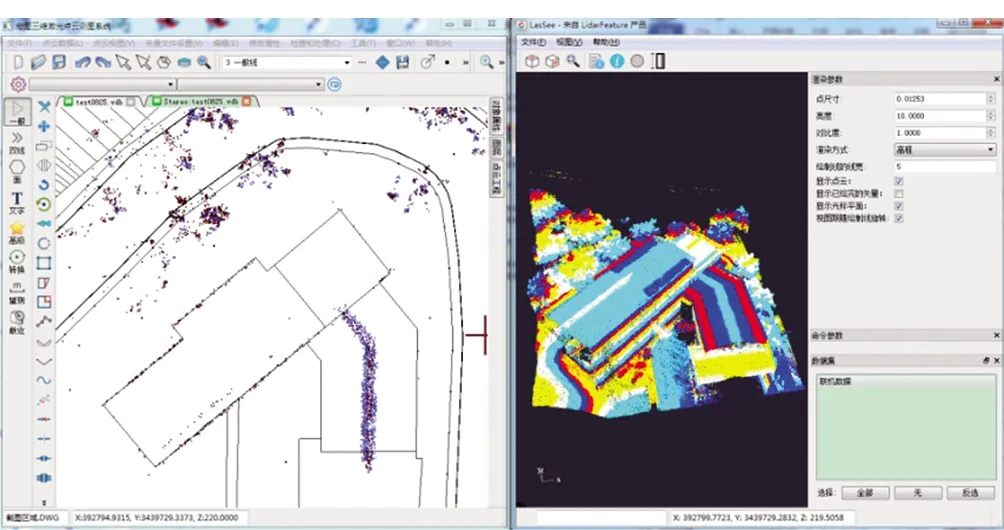
图13 二三维窗口联动点云切片测图
将地物图形与等高线图形进行叠加、编辑,同时由于切除了地物部分数据,造成生成的等高线局部缺失、扭曲、不光滑等,需要对照照片及点云数据,手动进行修改,最后加上高程注记,生成图示图例图廓,进行局部修饰[5]得到大比例尺地形图成果,如图14、图15所示。
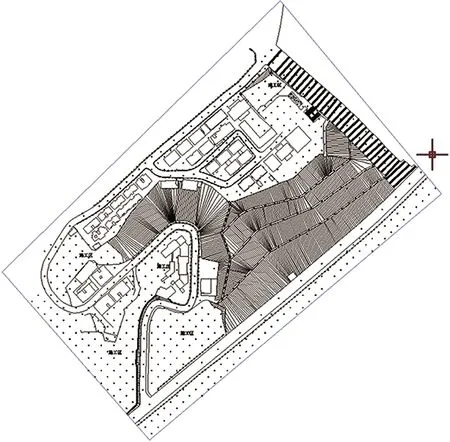
图14 DLG成果

图15 DLG与DOM套合效果
4 机载LiDAR系统测图精度评价
4.1 精度评价方法
传统全站仪配合RTK测绘大比例尺地形图的生产方式虽然效率有限,但由于在测图开始前布设图根控制网和地物碎部点逐个采用全站仪采集的方式保证了成图精度。为了验证基于PPK的机载LiDAR技术大比例尺地形图测绘的精度,在测区内设置了若干检查点,检查点主要包括房屋角点、道路交叉点、独立地物点。本文通过对检查点平面坐标比较的方式进行精度评价[6]。
(1)选取检查点的全站仪测定坐标和机载LiDAR成图坐标分别为:(aXi,aYi),(bXi,bYi)。
(2)计算X,Y方向的坐标差值,公式为:
dXi=aXi-bXi
(2)
dYi=aYi-bYi
(3)
(3)计算各检查点的相对误差,公式为:
(4)
(4)计算所有检查点的期望和标准差,即平均值和中误差,公式为:
(5)
(6)
4.2 评定结果分析
检查点的比较结果如表1所示。通过计算可得检查点的标准差为δ=0.038,即后差分机载LiDAR生产大比例尺地形图的中误差为 3.8 cm,满足 1∶500地形图生产的精度要求。
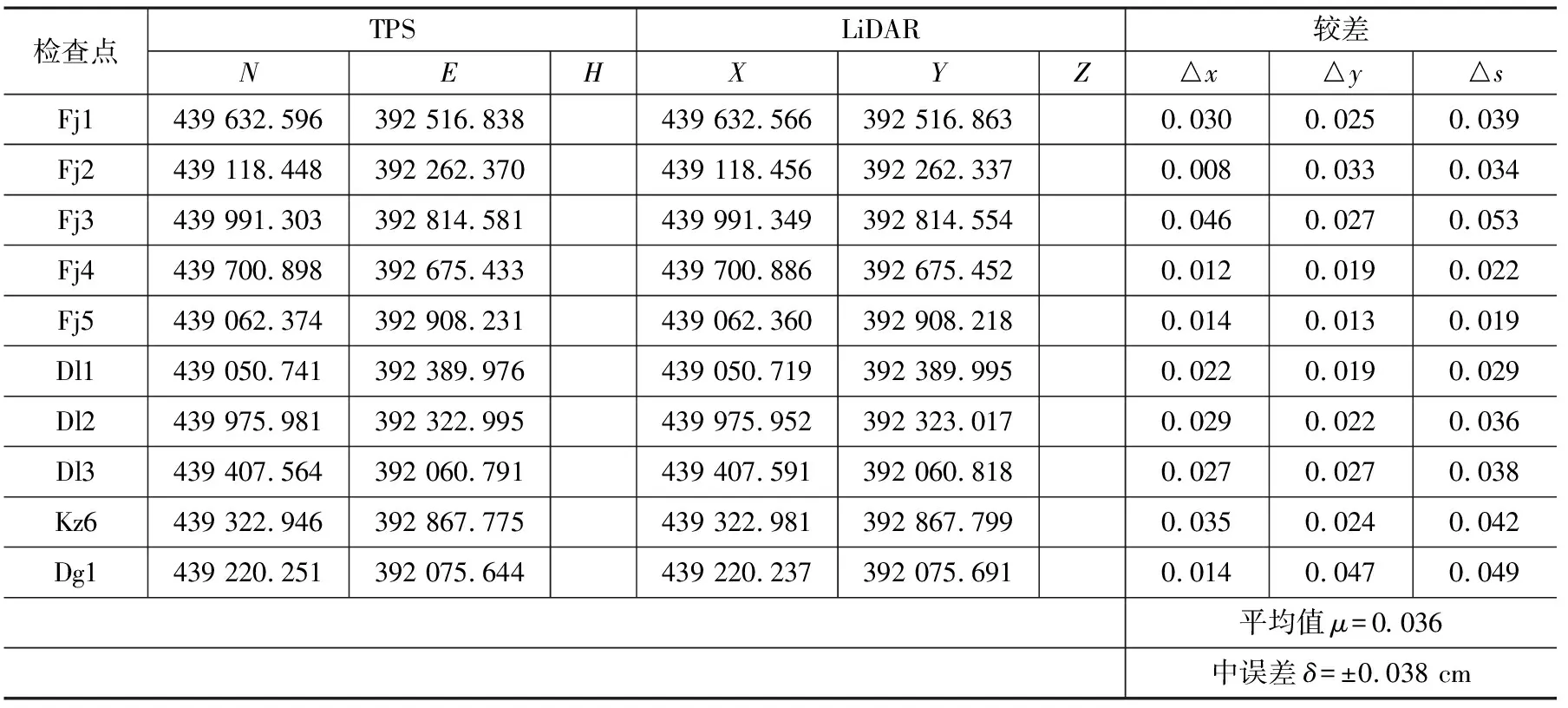
精度验证表 表1
5 结 语
本文利用重庆市某地区1∶500地形图测绘案例,分析了基于PPK的机载LiDAR技术在地形复杂区域大比例尺地图测绘的精度和效率,可以分析出:
(1)基于PPK的机载LiDAR技术能够快速而精确地采集大量点云数据,检查点精度验证得出中误差δ=±0.038(cm),满足 1∶500地形图测图精度要求;由于本项目面积偏小、检查点样本数量偏少,基于PPK的LiDAR技术在大比例尺地形图测绘中的精度验证工作可以做进一步加强研究。
(2)使用基于PPK的机载LiDAR技术,在农房一体调查、城市地形测图、带状工程测绘方面都具快速高效的优势。机载LiDAR技术受天气影响较小,效率高,可以穿透茂密林木和非接触扫描危崖崩岸等特性使其在便捷、高效、高精度获取大比例尺地形图的应用中具有广阔前景。