架空输电线路弧垂观测装置内置算法研究
2022-05-08刘云飞张文涛
刘云飞,焦 剑,张文涛,李 凯
(安徽送变电工程有限公司,安徽 合肥 230601)
1 工程概况
雅中-江西±800 kV特高压直流线路工程起点为四川省凉山州盐源县雅中换流站,终点为江西省抚州市的南昌换流站,输送容量8 000 MW。沿线自西向东分别途经四川、云南、贵州、湖南、江西5省,线路长度为1 691 km。3标段基本风速为27 m/s,覆冰厚度为15~30 mm。导线型号为JL1/G2A-1250/100、JL1/G2A-1000/80、JLHA4/G2A-1000/80,线夹处导线外接圆直径1 000 mm,分裂间距500 mm。
下面针对最常见的2种工况予以分析研究。
2 直线-直线档
2.1 线路参数
A塔参数:塔位中心O1坐标(x1、y1、z1),铁塔最低腿基面高差ho11,铁塔呼高ho12,滑车串长ho13,滑车一半宽度yo1,横担长度ao1,横担宽度bo1。
B塔参数:塔位中心O2坐标(x2、y2、z2)、铁塔最低腿基面高差ho21、铁塔呼高ho22、滑车串长ho23、滑车一半宽度yo2,横担长度ao2,横担宽度bo2。
线路参数:档距L,导线比载r,导线张力T,导线直径D;小车激光雷达设备到滑轮的距离h,GPS设备高于导线h0;子导线间距X1、X2、X3、X4、X5、X6、X7。
弧垂观测装置所处状态,当其在n#子导线时测量设备位置:坐标C(xc、yc、zc);雷达在垂直导线方向倾角传感器的垂直偏角θ0;雷达在垂直导线方向对1#~8#子导线扫描的垂直角:θ1、θ2、θ3、θ4、θ5、θ6、θ7、θ8;雷达在导线前后方向倾斜β。
换算后的实际档距Lj;换算的小车到塔的水平距离Lc(默认为到起始塔N1的距离);小车所在位置的动态观测弧垂fx,测量弧垂标准值fx0;计算测量弧垂差值1#子导线f1,2#~8#子导线激光雷达反馈的数据(处理),2#~8#子导线与1#子导线偏差反馈:f2、f3、f4、f5、f6、f7、f8。
2.2 计算实际档距
2.2.1 档距换算
实际档距Lj,
2.2.2 高差换算
A、B塔对应的挂点高度Ha、Hb为:

其中,ho11、ho21为最低腿高程减去中心桩高程。
2.2.3 装置距离起始塔长度计算
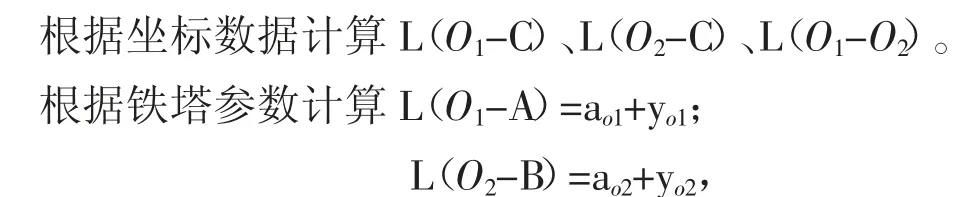
根据塔位中心O1坐标(x1、y1、z1)、塔位中心O2坐标(x2、y2、z2)、导线上设备C点坐标(xc、yc、zc)求得L(O1-C)、L(O2-C)、L(O1-O2)距离,该距离为地面坐标系,可以与铁塔中心建立计算坐标系,以顺线路O1、O2方向为X轴,以横线路方向为Y轴。
其中:yo1、yo2取值,外侧取正值,内侧取负值。
中相取ao1、ao2值为0,

铁塔挂点与塔位中心在地面的投影线与中心到导线设备投影线的夹角,A塔φ4、B塔φ5,其中φ4=90-φ1,φ5=90-φ2。根据余弦定理,C小车到A塔的水平距离L(A-C)、C小车到B塔的水平距离L(B-C)为:

L(A-C)或者L(B-C)即可带入弧垂计算公式中取值为导线设备小车与杆位中心距离Lc定义Lc=L(A-C)。
观测档装置位置示意图如图1所示。
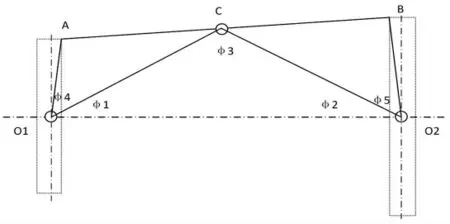
图1 观测档装置位置示意图
2.2.4 弧垂计算
测量已知量:小车高程Hc=zc,计算可知小车与杆位中心距离Lc,观测档两悬点高程Ha、Hb,则:

此时L=Lj,可得:fx=Ha-Hc-L1+h0×cosθ0×cosβ,同时计算弧垂标准值f0,作为标准值比较。最大弧垂f1/2为档距中间弧垂值,即Lc=L/2时的fx。根据测量fx计算最大弧垂f1/2,反算此时导线张力Tx=r×Lc×(Lj-Lc)/(2×fx×cos(atan((Hb-Ha)/Lj))),反算最大弧垂f1/2=r×Lj^2/8/Tx/cos(atan((Hb-Ha)/Lj))=Lj^2/4/(Lc×(Lj-Lc))×fx,弧垂标准值f01/2=r×Lj^2/8/T/cos(atan((Hb-Ha)/Lj))。测量1#子导线弧垂差值f1=fx-f0,若f1>0则弧垂偏大,若f1<0则弧垂过小。
弧垂计算过程示意图,如图2所示。

图2 弧垂计算过程示意图
测量小车滑行至档距中间是可直接测量得fx1=f1/2,通过与标准弧垂值f0比较可得出。因GPS高于导线h0值,实际fx'=fx+h0×cosθ0×cosβ,测量1#子导线弧垂fx1=fx1/2=Lj^2/4/(Lc×(Lj-Lc))×(fx),1#子导线偏差f1=fx1/2-f01/2,若f1>0则弧垂偏大,若f1<0则弧垂过小。
2.2.5 各子导线弧垂比较
小车上有雷达设备,雷达距离1#子导线高度为h,雷达在垂直1#导线方向倾角传感器的垂直偏角θ0,雷达在1#导线前后方向倾斜β。利用雷达扫描1#~8#子导线对应距离为L2、L3、L4、L5、L6、L7、L8,和雷达倾角传感器扫描角度为θ1、θ2、θ3、θ4、θ5、θ6、θ7、θ8。
设备倾斜与子导线相对位置示意图如图3所示。

图3 设备倾斜与子导线相对位置示意图
因θ0会影响实际的雷达扫描角度,需要对雷达角度校正,实际雷达角度为θx+θ0。
2.2.6 子导线计算与判断
小车安装在1#子导线时,弧垂观测装置的雷达与1#子导线高差:h1=h×cosθ0×cosβ;与2#子导线高差:h2=L2×sin(θ2+θ)0;与3#子导线高差:h3=L3×sin(θ3+θ)0;与4#子导线高差:h4=L4×sin(θ4+θ)0;与5#子导线高差:h5=L5×sin(θ5+θ)0;与6#子导线高差:h6=L6×sin(θ6+θ0);与7#子导线高差:h7=L7×sin(θ7+θ0);与8#子导线高差:h8=L8×sin(θ8+θ)0。
子导线最大弧垂计算:
1#子导线最大弧垂值fx1=fx1/2=Lj^2/4(/Lc×(Lj-Lc))×(fx)。
2#子导线最大弧垂值fx2=Lj^2/4(/Lc×(Lj-Lc))×(fx+f2),2#子导线偏差f2=h2-h1;3#子导线最大弧垂值fx3=Lj^2/4/(Lc×(Lj-Lc))×(fx+f3),3#子导线偏差f3=h3-h1;4#子导线最大弧垂值fx4=Lj^2/4/(Lc×(Lj-Lc))×(fx+f4),4#子导线偏差f4=h4-h1;5#子导线最大弧垂值fx5=Lj^2/4/(Lc×(Lj-Lc))×(fx+f5),5#子导线偏差f5=h5-h1;6#子导线最大弧垂值fx6=Lj^2/4/(Lc×(Lj-Lc))×(fx+f6),6#子导线偏差f6=h6-h1;7#子导线最大弧垂值fx7=Lj^2/4/(Lc×(Lj-Lc))×(fx+f7),7#子导线偏差f7=h7-h1;8#子导线最大弧垂值fx8=Lj^2/4/(Lc×(Lj-Lc))×(fx+f8),8#子导线偏差f8=h8-h1。当偏差值为正值时弧垂偏大,为负值时弧垂过小。
激光雷达扫描子导线示意图如图4所示。
图4 激光雷达扫描子导线示意图
子导线判断:
当θ1<90°时,雷达扫描子导线判断:水平距离判断h×sin(θ0)+Ln×cos(θn+θ0);2#子导线取值范围为X1-100 mm<h×sin(θ0)+L2×cos(θ2+θ0)<X1+100 mm;3#子导线取值范围为X1+X2-100 mm<h×sin(θ0)+L3×cos(θ3+θ0)<X1+X2+100 mm,辅助判断|θ2-θ3|>atan(D/L3),L3×cos(θ3+θ0)-L2×cos(θ2+θ0)>D;4#子导线取值范围为X1+X2+X3-100 mm<h×sin(θ0)+L4×cos(θ4+θ0)<X1+X2+X3+100 mm,辅助判断|θ3-θ4|>atan(D/L4)),L4×cos(θ4+θ0)-L3×cos(θ3+θ0)>D;5#子导线取值范围为X1+X2+X3+X4-100 mm<h×sin(θ0)+L5×cos(θ5+θ0)<X1+X2+X3+X4+100 mm,辅助判断|θ4-θ5|>atan(D/L5),L5×cos(θ5+θ0)-L4×cos(θ4+θ0)>D;6#子导线取值范围为X1+X2+X3+X4+X5-100 mm<h×sin(θ0)+L6×cos(θ6+θ0)<X1+X2+X3+X4+X5+100 mm,辅助判断|θ5-θ6|>atan(D/L6),L6×cos(θ6+θ0)-L5×cos(θ5+θ0)>D;7#子导线取值范围为X1+X2+X3+X4+X5+X6-100 mm<h×sin(θ0)+L7×cos(θ7+θ0)<X1+X2+X3+X4+X5+X6+100 mm,辅助判断|θ6-θ7|>atan(D/L7),L7×cos(θ7+θ0)-L6×cos(θ6+θ0)>D;8#子导线取值范围:X1+X2+X3+X4+X5+X6+X7-100 mm<h×sin(θ0)+L8×cos(θ8+θ0)<X1+X2+X3+X4+X5+X6+X7+100 mm,辅助判断|θ7-θ8|>atan(D/L8),L8×cos(θ8+θ0)-L7×cos(θ7+θ0)>D。
当θ1>90°时,雷达扫描子导线判断:水平距离判断h×sin(θ0)+Ln×cos(180-θn-θ0),此时数据无效。动态弧垂值求解:根据返回的数据,按时间取20组,对20组数据取垂直高度的中位数;取fx的中位数显示测量结果。
