基于无源控制理论的直流能馈型单相交流PEL研究
2022-05-07陶丛浩廖冬初孙得金
陶丛浩, 赵 阳, 廖冬初, 孙得金
(1 湖北工业大学电气与电子工程学院, 湖北 武汉 430068; 2 武汉征原电气有限公司, 湖北 武汉 430012)
传统上逆变电源带载测试常使用电阻性、阻容性或阻感性等能耗型负载,使用能耗型负载的测试方式使测试电能转化为热能造成能源的浪费,为避免负载发热引起的温升影响设备正常工作,厂家需配备冷却装置进行降温,增加了测试的成本。直流能馈型单相交流PEL体积小,负载模拟形式灵活,调节方便,测试能量循环利用,极大提高了待测逆变电源带载测试的效率和测试能量的利用率,契合可持续发展理念,满足构建资源节约型社会的要求。
直流能馈型单相交流PEL拓扑结构[1-6]采用负载模拟单元和能量回馈单元两级级联,负载模拟单元可灵活模拟不同特性负载,能量回馈单元根据回馈电能的类型分为交流能馈型和直流能馈型。本文能量回馈单元采用直流能馈,相较于将测试能量回馈到电网的优势在于:省去了测试能量回馈到电网后再整流的转换过程,提高测试能量的利用效率;避免给电网带来谐波污染;无逆变电路,控制算法更简单,并采用具有高频变压器隔离的移相全桥DC/DC变换器进行隔离,系统可靠性高。
本文直流能馈型单相交流PEL的负载模拟单元采用电压型PWM整流器(VSR)[7-10],由于VSR具有非线性的特点,常规的PI控制手段已无法满足负载模拟单元高性能的要求。文献[11]通过分解网侧电流,实现解耦控制,控制性能较好,但存在参数调试复杂、大范围稳定性不强的缺点。文献[12]基于虚拟旋转坐标系,针对不同的开关状态提出模型预测直接功率控制,但其存在控制量复杂、运算量大等缺点。
基于此,本文将无源控制理论[13-14]引入直流能馈型单相交流PEL的负载模拟单元中,无源控制理论从系统能量的角度出发对系统进行控制器的设计,使非线性系统的控制器设计得以简化,实现对电感电流期望值的无静差跟踪,克服传统PI控制时难以获得较好的动静态性能的缺点,通过对有功电流和无功电流的单独控制,使模拟调节更方便。最后,通过Matlab/Simulink仿真[15]和实验平台验证了本文所提控制策略的有效性。
1 直流能馈型交流PEL主电路结构
图1为直流能馈型单相交流PEL拓扑结构。该拓扑结构分为两级,前级为负载特性模拟单元,与待测逆变电源相连,其拓扑结构为单相PWM整流器,通过控制交流侧电流的大小和相位达到模拟真实阻抗负载效果的目的;后级为能量回馈单元,其拓扑结构为移相全桥变换器,其直流输出侧与待测逆变电源输入侧相连,达到能量回馈的目的。
2 负载模拟单元数学模型
图2为负载模拟单元电路拓扑,其中us为待测逆变电源的输出电压、is为待测逆变电源的输出电流、uab为整流器交流侧电压、Ls为网侧滤波电感、Rs为线路寄生电阻、C为直流侧支撑电容、udc为直流侧压、RL为等效负载。
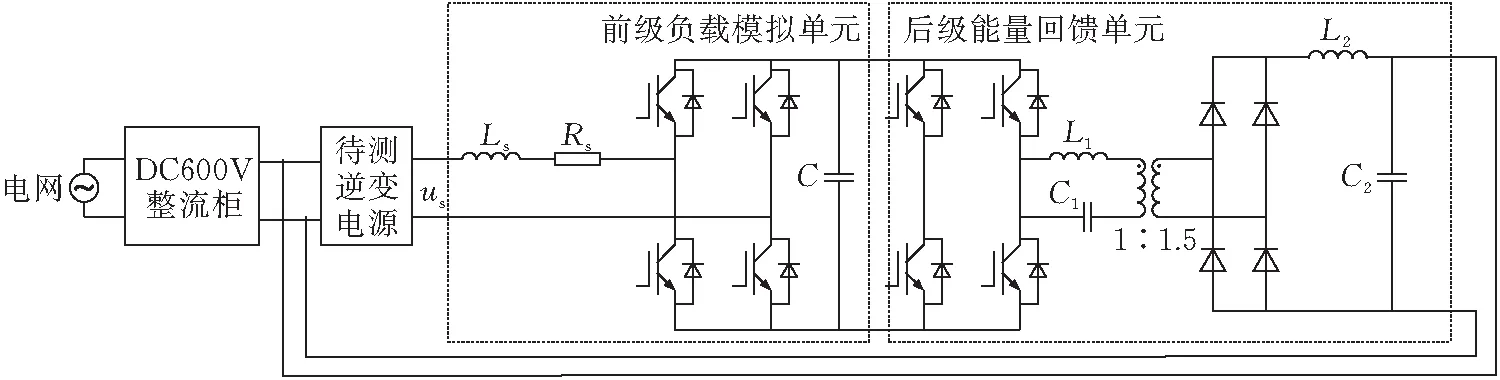
图 1 直流能馈型单相交流PEL电路结构
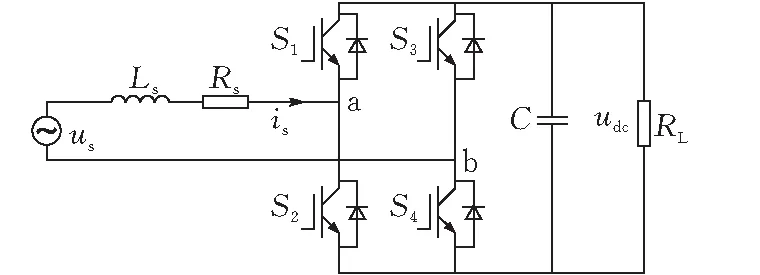
图 2 负载模拟单元电路拓扑
在交流侧运用基尔霍夫电压定律,直流侧运用基尔霍夫电流定律,可得到单相VSR数学模型。
(1)
其中:S为开关函数, 定义S=1(S1、S4导通) ;S=0(S1、S3或S2、S4导通);S=-1(S2、S3导通)。
3 负载模拟单元在旋转坐标系下的数学模型
单相系统只有一相网侧电压和电流,需要虚拟一个与其正交的电压、电流交流分量,从而构建出虚拟的两相静止坐标系,然后进行旋转坐标变换将网侧交流转换为旋转坐标系下的直流量。虚拟交流电流量可通过将实际的交流电流量延迟π/2再乘以-1得到。


图 3 静止坐标系与等效旋转坐标系
(2)
将式(2)代入式(1),可以得到负载模拟单元在两相旋转坐标系下的数学模型:
(3)
4 负载模拟的EL模型
将模型式(3)写成下式:

(4)

5 无源控制器的设计
5.1 VSR无源性判断
运用无源控制理论的前提是系统具有无源性。由式(3)可得:
(5)
由式(5)可得功率平衡方程:

(6)
将上式等号左侧表示成能量形式:

(7)
对式(7)两边从0到T积分,可得能量方程:

(8)

(9)
式(9)表明系统能量增长总和总是小于外部注入能量总和,即系统总是伴随着能量的损失,系统是严格无源的。
5.2 无源控制器的确定

(10)


(11)
式(11)等式右侧为0,可以得到无源控制器为:
(12)
在进行旋转坐标变换时,令d轴与网侧电压us方向保持一致,故ud=Um,uq=0。
由式(12)可以得到方程组
(13)
由式(13)的第一个、第二个方程可以得到:
(14)
将式(14)代入式(4)得:
(15)
负载模拟单元的无源控制策略控制量为Sd、Sq,被控量为id、iq。直流侧电压的变化反映了直流能馈型交流PEL输入、输出侧有功功率的平衡情况,后级能量回馈单元通过电压外环实现对udc的控制,根据直流侧电压的变化情况来控制馈网电流的调节方向,最终保证直流能馈型交流PEL两侧功率平衡。
由开关函数(14)可以得到系统的无源控制框图(图4)。
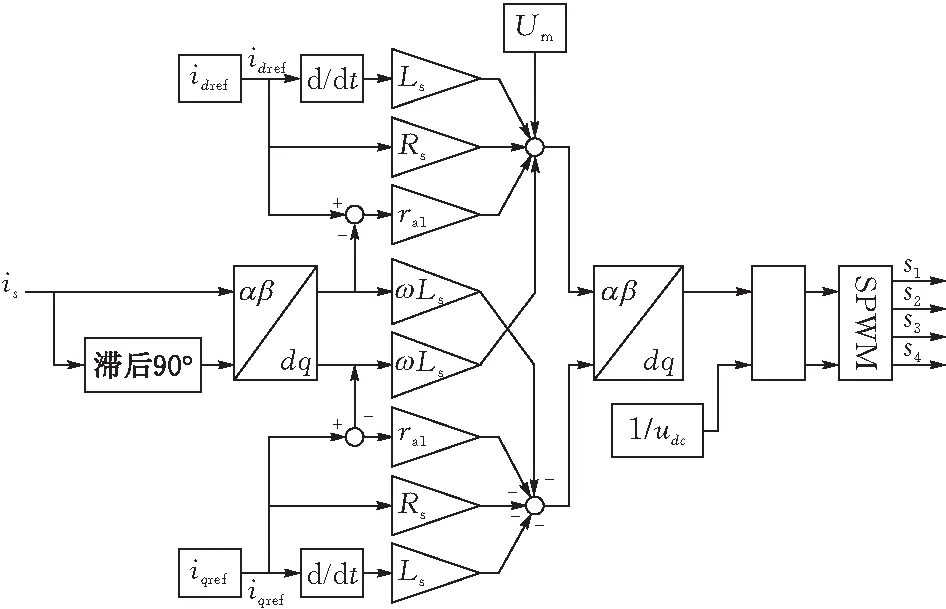
图 4 无源控制框图
6 仿真与实验验证
6.1 仿真结果
在Matlab/Simulink中进行仿真,根据以上设计搭建出直流能馈型交流PEL主电路拓扑(表1)。
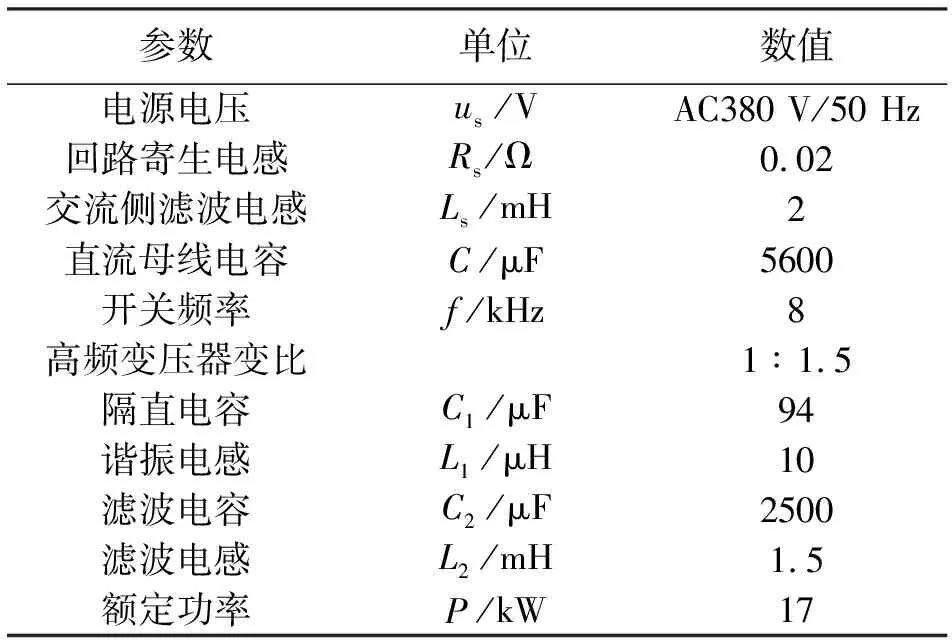
表1 直流能馈型交流PEL主电路参数
阻尼项ra1和ra2改变时,对输入电流有影响,需要确定合适的注入阻尼项。由式(14)可知,控制器参数较多,使用时设计较为复杂,为简化控制器设计,取ra1=ra2。注入阻尼不同时的结果(表2)。由结果可知当ra1=ra2=500 Ω时,输入电流效果较好。

表2 不同注入阻尼的仿真结果
6.2 稳态性能
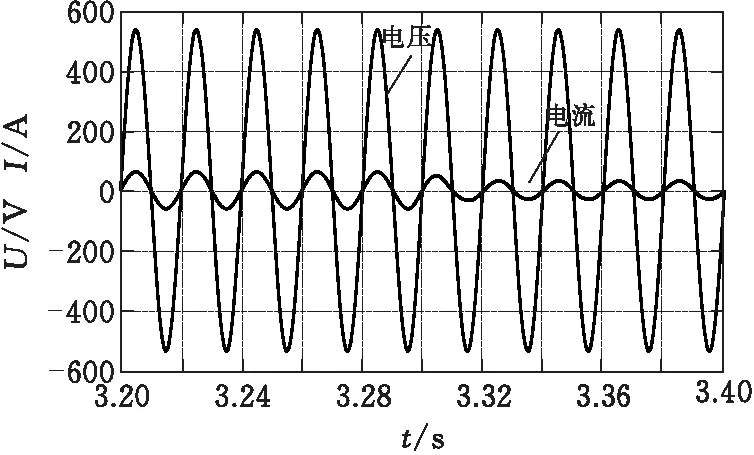
6.2.1纯电阻性负载在17 kW额定功率时,其额定电流为63.3 A,输入电流有功给定值设置63.3 A,输入电流无功给定值设置0。由图5可知,输入电流和输入电压同相位。输入电流的峰值为63.7 A,与给定值的差值为0.4 A,幅值误差百分比为0.63%,基本上实现对电流无静差跟踪。如图6可知,直流能馈型交流PEL到达稳态后,回馈电流平均值为28.1 A,与理论值28.3 A基本吻合。
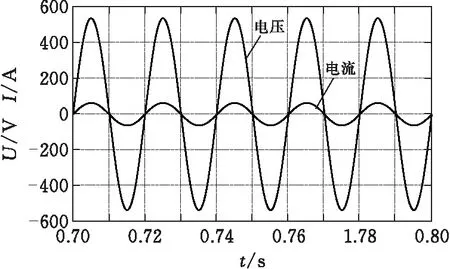
图 5 输入电压和电流
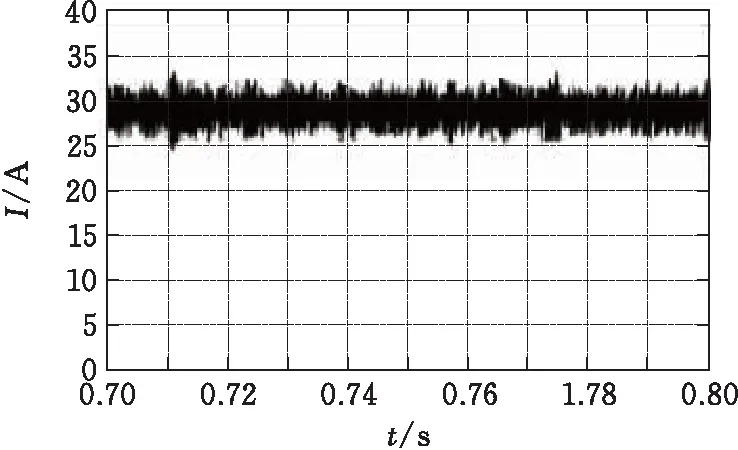
图 6 回馈电流
6.2.2阻感性负载阻抗角的给定值为-30°,电流有功给定值设置54.8 A,电流无功给定值设置-31.6 A,由图7可知,输入电流滞后输入电压1.66 ms,换算为角度为29.9°,相位误差为0.1°,相位误差百分比为0.33%,输入电流的峰值为63.7 A,幅值误差百分比为0.63%,达到了模拟阻感性负载的目的。

图 7 阻感特性下输入电压、电流
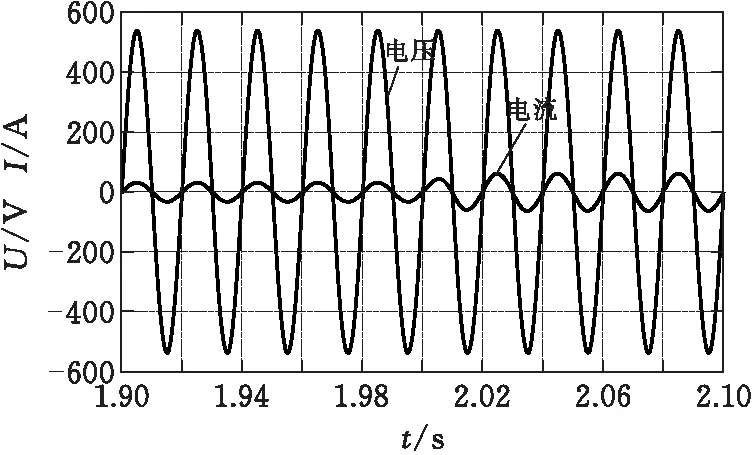
6.2.3阻容性负载阻抗角的给定值为45°,电流有功给定值设置44.7 A,电流无功给定值设置44.7 A,由图8可知,电流超前电压2.46 ms,换算为角度为44.3°,相位误差为0.7°,相位误差百分比为1.5%,满足模拟阻容性负载的要求,输入电流的峰值为63.7 A,幅值误差百分比为0.63%,基本上实现对电流无静差跟踪。

图 8 阻容特性下输入电压、电流
6.3 动态性能
6.3.1负载突增、突减系统工作在纯电阻性负载特性工况下,图9a、图9b分别是负载突增、突减动作时的波形。在2 s时刻完成半功率(8.5 kW)到满功率(17 kW)突增, 电流的峰值从31.5 A突变到63 A;在3.3 s时刻完成满功率到半功率突减,电流的峰值也从63 A再次回到31.5 A,在完成突增突减动作后2.5 ms就可达到稳定,动态性能良好。
(a)负载突增波形
(b)负载突减波形
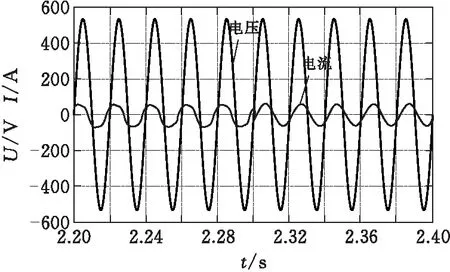
(c)相位突变时的输入电压、电流

(d)有功、无功电流波形图 9 负载突变时输入电压、电流
6.3.2相位突变在额定功率工况下,2.3 s时刻直流能馈型交流PEL由阻容性45°突变为阻感性-30°负载运行,电流在2 ms后达到稳定,动态性能良好。仿真结果见图9c。
图9d是相位突变前后电流有功、无功波形图。系统工作在阻容性45°负载特性时,输入电流有功为46.8 A,输入电流无功为46 A;当工作在阻感-30°负载特性时,输入电流有功为52.3 A,输入电流无功为-31.2 A,这与上诉理论计算值基本吻合,满足电子负载相位突变的动态性能要求,实现对有功电流和无功电流的单独控制,使负载模拟调节更加方便。
6.4 实验结果
为了验证该控制策略的可行性,搭建直流能馈型交流PEL实验样机,主控芯片采用TMS320F2812,硬件保护芯片采用CPLD,系统主电路参数与仿真完全一致。实验样机见图10。

图10 实验样机
6.4.1模拟纯阻性负载特性直流能馈型交流PEL模拟纯阻性负载时,输入电流和输入电压的实验波形如图11a所示,从图中可知,电流和电压实现同相位,满足模拟纯阻性负载的要求。输入电流的峰值为64 A,与理论值相差0.5 A,基本实现对电流无静差跟踪。图12是回馈电流实验波形,回馈电流在28 A上下,这与理论值28.3 A基本一致。
实验部分,直流能馈型交流PEL除模拟突增突减特性外,其它各特性模拟时都是在额定功率工况下试验的,后文不再赘述。
6.4.2模拟阻感性负载特性图11b是直流能馈型交流PEL模拟阻感性负载时的输入电流、电压的实验波形。输入电流峰值时刻与输入电压峰值时刻间隔1.65 ms,折算成角度为29.7°,输入电流的峰值为64 A,与理论计算值相差0.5 A,达到模拟阻感性负载的效果。
6.4.3模拟阻容性负载特性直流能馈型交流PEL模拟阻容性负载时的实验波形如图11c所示。输入电流峰值时刻与输入电压峰值时刻间隔2.48 ms,转换角度为44.64°,输入电流的峰值为63.5 A,与理论计算值相差0.2 A,满足模拟阻容性负载的要求。
通过实验发现,实际电流峰值一般略高于理论电流峰值,原因是直流能馈型交流PEL本身会存在线路寄生电阻,导致一部分功率被消耗掉,因此系统输入功率大于输出功率,实际输入电流峰值也就会略高于理论电流峰值。考虑到这一实际情况,可以认为基本实现电流无静差跟踪。

(a)模拟纯电阻负载特性的实验波形
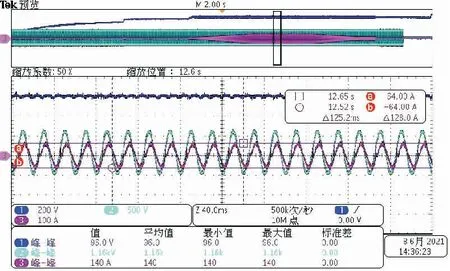
(b)模拟阻感性负载特性的实验波形

(c)模拟阻容性负载特性的实验波形 图11 模拟不同负载特性下的输入电压、电流实验波形

图12 回馈电流
6.4.4模拟负载突增、突减特性运用TMS320F2812的T0定时器,在3 s时刻置标志位,实现直流能馈型交流PEL从半功率(8.5 kW)突增到满功率(17 kW),设置6 s时刻完成满功率到半功率突减动作,7.5 s时刻逐渐减小电流给定值,实现软关。由图13a至c可知,输入电流与输入电压同相位,电流峰值64 A(17 kW)、31 A(8.5 kW),突增突减动作完成后1.85 ms就可稳定,动态性能良好。

(a)负载突增、突减的整体实验波形
(b)负载突增时的放大波形

(c)负载突减时的放大波形 图13 模拟负载突增突减时的输入电压、电流实验波形
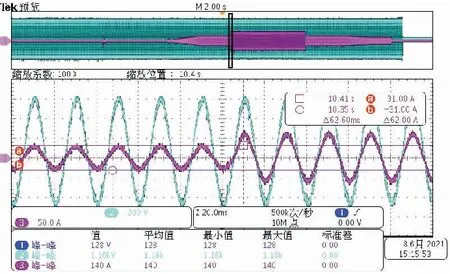
6.4.5模拟相位突变特性设置直流能馈型交流PEL在4.5 s时刻完成阻容45°到阻感30°相位突变动作,6 s时刻开始软关,实现对有功电流和无功电流的单独控制,负载模拟调节更方便。由图14可知,相位突变后,电流在1.2 ms左右达到稳定,突变前后输入电流峰值基本稳定在64 A,动静态性能良好,满足模拟相位突变特性的要求。

图14 模拟相位突变特性的实验波形
7 结束语
为满足待测逆变电源带载测试要求,实现测试能量循环利用,设计出直流能馈型单相交流PEL,负载模拟单元负载形式灵活、调节方便,能量回馈单元以直流形式回馈能量至待测逆变电源输入侧,提高能源的利用率。
为进一步提高直流能馈型交流PEL的性能,将无源控制策略运用到其负载模拟单元。实验和仿真结果表明,基于无源控制理论的直流能馈型单相交流PEL稳态误差小,动态响应快,能够取得较好的动态及稳态性能,通过对有功电流和无功电流的单独控制,使负载模拟调节更加方便,满足对待测逆变电源进行不同工况下测试的要求,并实现测试能源的二次利用。
