月球采样返回飞控任务多目标协同规划设计
2022-05-06彭德云谢剑锋赵凤才张爱成
彭德云,谢剑锋,赵凤才,梁 爽,陈 翔,张爱成
(北京航天飞行控制中心,北京 100094)
引 言
自1969年7月21日发射“阿波罗11号”(Apollo 11)到1972年12月11日发射“阿波罗17号”(Apollo 17)[1-3]期间,美国先后进行了6次载人登月探测任务;1970年9月—1976年8月,前苏联实施了3次无人月球采样返回[4];自1976年最后一次月球采样返回至2020年中国实施“嫦娥五号”首次月球采样返回任务,已过去了44年。“嫦娥三号”“嫦娥四号”着陆器两次成功实现月面软着陆[5-6];2019年4月,以色列“创世纪号”(Beresheet)探测器在着陆月球距离月面约150 m高度与地面失去联系[7];2019年9月印度月球探测器“月船2号”(Chandrayaan-2)释放的着陆器在距离月球表面2.1 km处与地球失去联系[8]。月球软着陆、月面起飞、月球轨道交会对接和高速再入返回系列,高精度控制技术是实现月面就位探测和采样返回的技术基础。月球采样返回与星球表面深空探测和星际探测长期飞行任务相比,要满足发射、月面着陆、月面起飞、交会对接和再入返回等系列窗口约束,其特点是飞行过程复杂、多类约束组合复杂、关键控制密集、天地测控交互频繁[9-10]。
多目标协同规划系统是将多个航天器、多类测控资源和多种约束的复杂事件进行各测控站跟踪和各航天器指令序列的联合规划,分解为各测控链路对单个/多个控制目标的上下行跟踪调度、各航天器的在轨执行事件和指令序列安排。航天任务规划系统在长周期、事件具有重复调度的相关领域取得了较大进展。美国喷气推进实验室(Jet Propulsion Laboratory,JPL)开发的自主规划与调度系统ASPEN在地球观测和巡视器任务中得到成功应用[11]。美国国家航空航天局(National Aeronautics and Space Administration,NASA)的艾姆斯 (Ames)研究中心根据启发式搜索方法开发了航天器任务规划调度系统(Extensible Unification Remote Operation Planning Framework,EUROPA),并应用于多个火星车等深空探测任务中。周建亮等[12]研究了可适用于月面长期工作的巡视器任务规划方法,并应用于“嫦娥三号”巡视器探测等任务。徐瑞等[13-14]对深空探测器/天体表面巡视器的自主任务规划或自主故障处置相关算法进行仿真研究。上述任务规划方法在复杂航天任务中面临对应知识表示困难、难以应对应急处置需求等问题。月球采样返回任务和载人登月任务在飞行轨道、飞行阶段、任务周期、航天器模态组合和任务约束方面有较大程度相似性,均面临飞行过程复杂、航天器组成模态多、任务约束复杂、应急处置紧等问题[15-18],给全任务飞控任务规划带来了巨大的挑战。
本文在分析月球采样返回任务难点的基础上,针对飞行控制任务所需要重点解决的四器多组态器间代传上行控制和多目标多约束协同规划等问题,设计了多目标复杂器间代传上行控制关系描述方法、多目标测控资源规划方法和多目标事件规划方法,解决了复杂多目标高密度轨道及姿态组合控制下的协同规划难题。
1 月球采样返回任务测控分析
1.1 采样返回探测器
月球采样返回任务探测器在不同飞行阶段具有四器组合体、着上组合体、轨返组合体(带支撑舱)、上升器单器、轨返组合体(不带支撑舱)、对接组合体、上升器连同对接舱组合体、轨返组合体(不带对接机构)、轨道器单器、返回器单器等不同构型,如图1所示[1-2]。不同构型的测控目标其轨道控制模式、姿态控制模式、上下行信息流代传方式、测控点频组合、波束特征均有差异,需要针对不同构型特点进行系统分析,使飞控任务规划系统能够在不同飞行阶段生成匹配的航天器飞行控制规划和地面协同操作规划。

图1 探测器不同飞行阶段的构型Fig. 1 Different conformations of each flight stage
1.2 飞行阶段测控状态分析
轨道器和着陆器配备测控数传设备,上升器和返回器配备测控设备,四器在组合体状态具备通过轨道器和上升器测控上下行能力,在轨返组合体状态下具备通过轨道器上下行能力,在着上组合体状态下具备通过上升器上下行能力。在月球轨道交会对接期间具备无线代传能力。
根据测控数据上下行和通道特点,月球采样返回飞控任务的控制目标包括轨道器、返回器和上升器。在四器组合体分离、交会对接、对接组合体分离、轨返分离等组合体构型发生改变前后,涉及多目标联合测控和多个单目标独立测控状态的切换。在月球采样返回任务期间,环月轨道和月面正面同时还运行着需要测控的目标,包括“嫦娥三号”着陆器、再入返回飞行任务服务舱和“天问一号”探测器。在深空测控资源限定的情况下,多个测控目标飞行控制和测控资源分配需采用多目标协同控制模式统一安排。
1.3 探测器测控技术难点分析
探测器在地面跟踪控制下经过发射入轨段、地月转移段、近月制动段、环月飞行段、着陆下降段、月面工作段、月面上升段、交会对接与样品转移段、环月等待段、月地转移段、再入回收段等阶段,完成月面自动采样返回任务,如图2所示[1-3]。与之前的探月任务相比,月面采样返回任务飞行阶段增加上升器远程导引、轨返组合体调相、月面上升、交会对接与样品转移、环月等待、月地入射飞行等阶段,增加了包含组合体分离与对接组合控制、标称执行等约30次轨道控制。在较短的任务周期需要实施密集的状态切换和轨道姿态控制。各飞行阶段、各航天器的轨道控制高度耦合,推进剂余量少,测控约束多,控制精度要求高,各次重大控制之间测轨时间和上行注入数据准备时间大大缩短,应急轨道重构故障分支多,设计难度大,对任务飞行控制及其规划提出了空前的挑战。

图2 月面采样返回任务飞行过程示意图Fig. 2 Flight processes of lunar sampling and return mission
2 月面采样返回任务飞控模式设计
首次月球采样返回任务继承了中国月球巡视探测任务和近地轨道交会对接任务的部分成果,其飞行控制与“嫦娥三号”任务、近地轨道交会对接任务有一定的相似性,又有一定的差异。对比3个任务之间飞行控制的相同点和差异点,可为地面飞行控制系统设计提供全局性信息。采样返回任务月面软着陆飞行控制与“嫦娥三号”月面软着陆飞行控制对比如表1所示,采样封装遥操作与月球巡视器遥操作控制对比如表2所示。近地轨道载人交会对接与月球轨道无人交会对接对比如表3所示。

表1 采样返回任务月面软着陆飞行控制与“嫦娥三号”月面软着陆飞行控制对比Table 1 Soft lunar surface landing flight control contrast between lunar sampling and return mission and Chang’E-3 mission

表2 采样封装遥操作控制与月球巡视器遥操控制作对比Table 2 Tele-operation contrast between lunar sampling and return mission and lunar rover mission

表3 月球轨道无人交会对接与近地轨道载人交会对接对比Table 3 Flight control contrast between unmanned lunar trajectory rendezvous and manned near-Earth trajectory rendezvous
“嫦娥五号”月面采样返回任务采用“月球软着陆+月球起飞+月球轨道无人交会对接”的创新模式,在地面有限测控支持下,需进行高精度测定轨和地面引导及控制,实现地面控制和探测器自主控制的无缝衔接。
2.1 飞控测控任务协同规划问题
在月球采样返回任务中要完成对探测器(含轨道器、着陆器、上升器、返回器)遥测数传数据处理、遥控指令发送、工作状况监视、轨道确定、轨控策略制定;完成月面工作段样品采集及转移、样品封装、动力下降段和月面上升段运行轨迹的监视,并对轨道器和上升器在月球轨道交会对接提供远程导引;完成对返回器再入弹道的监视,返回落点的预报;完成搜索回收任务的指挥调度和过程显示;完成与各相关参试单位及任务单元的信息交换。月球采样返回飞控任务系统在以往探月工程和再入返回任务等软件功能基础上,需要重点解决实现四器多组态器间代传上行控制和多目标多约束协同规划等问题。
2.2 标称计划飞控模式设计
月球采样返回任务中,飞行控制中心采用计划工作模式开展测控工作。在这种工作模式下,飞行控制中心依据飞行程序、理论轨道,汇集飞控相关需求,编排并输入各类标称计划。任务中依据实测轨道及对应的预报数据、控制参数生成各类实战计划,探测器系统、地面应用系统和测控系统按飞行控制中心生成的各类测控计划协同完成本次任务的飞控工作。计划工作模式的示意如图3。

图3 月球采样返回标称计划工作模式示意图Fig. 3 Execution processes flowchart of scheduling work pattern of lunar sampling and return mission
3 多目标器间代传控制关系
月球采样返回任务中,不同航天器在不同构型和飞行阶段之间具备特定的有线或无线的星间链路,按不同协议代为接收和转发控制指令、遥测数据。任务规划环节需要选择并描述所有代传指令的代传链路状态,实质是要解决多目标协同控制事件描述以及对应多目标控制指令生成之间的映射问题。其核心是需要依据各个飞行控制事件需求,实现目标航天器的控制及其代传上下行数据航天器之间关联控制。为支持多个目标之间的协同配合关系描述,采用多目标器间代传控制关系描述方法,该方法在航天器指令规划、下行数据转发处理和测控资源的规划调度等各个环节均引入并区分控制目标和上行路由。
3.1 控制目标和上行路由
控制目标是指遥控指令和注入数据最终到达的目标航天器。根据月球采样返回任务的数据上下行和通道特点,控制目标包括轨道器、上升器和返回器。在不同的组合体模式、单器工作模式和中继通信模式下,指令需要经由特定航天器(轨道器、上升器等)的上行信道发送,所经由的航天器路径称为上行路由。以图4为例,地面对目标航天器上行控制时,经由的航天器路由列表表示为“航天器1→航天器2→···→航天器n”。上行指令数据即按该路由链表进行反向的格式封装处理,即按“航天器n→航天器n–1→···→航天器1”的代传格式封装。上行路由的节点数n表征上行路由的长度。对月球采样返回任务而言,其节点数均为1,表示均通过选中的某个目标作为上行路由目标代传其它控制目标指令。月球采样返回任务的对3个控制目标上行时,共有可用3个单节点上行路由,分别为轨道器路由、上升器/着上组合体路由、返回器路由。

图4 上行路由示意图Fig. 4 Flowchart of uplink router
控制事件描述时,采用“控制目标”属性值明确事件发生的主体。该事件对应的指令代码、注入数据、遥测的数据生成和发送均通过“控制目标”属性实现与该目标基础数据集的自动关联。飞行控制事件的“上行路由”属性明确航天器之间的上下行代传关系。该事件对应代传数据的协议转换、数据封包/解包处理通过“上行路由”属性实现与代传目标基础数据集的自动关联。飞行控制事件通过上行路由的测控网配置实现飞控事件与地面测控网的协同操作。由于控制目标的上行数据和下行数据均通过上行路由目标作为与地面测控的路由节点,地面仅对上行路由目标分配测控资源。上行路由的测控资源配置内容为不同时段的可选测站集合及测站操作需求。任务规划软件依据测控资源分配规则集和上述测控资源配置,实现对测控站资源的统一分配。
3.2 上行路由一般选取原则
月面采样返回任务的航天器组合模态在飞行阶段由于任务不同,对应的组合模态也各不相同。在有限的地面测控资源前提下,为了满足不同阶段的多个目标的地面测控、监视需求,按以下几个原则确定上行路由目标。
1)各个组合体模态下,均以对地测控有利的目标作为上行路由。地面测控有利资源优先确保该目标测控需求,其它目标通过上行路由目标进行上行和下行的数据代传。
2)着上组合体和轨返组合体各自独立工作时,为保持上行状态稳定性和对地有利原则,每个组合体选择其中一个对地测控有利目标作为上行路由,为各上行路由配置适当测控资源。
3)轨道器和上升器均配置了双点频、全空间覆盖的上下行测控设备,轨道器和着陆器配置了数传发射和定向天线等数传设备,返回器配置了测控天线和回收相关信标设备,在返回前择机加电。因此,各组合体阶段优先选用轨道器和上升器作为上行路由目标。
在四器组合体阶段,轨道器和上升器均可作为上行路由目标,为保持地面上行状态稳定性和对地有利原则,正常情况下四器仅选用一个上行路由,具体选择依据探测器姿态决定的对地指向自动选取。
4)单目标阶段,各控制目标的指令自己直接接收、自己直接执行,上行路由与控制目标相同。任务的上行路由根据飞行器组合状态和飞行姿态确定。按飞行阶段和组合模态、对地姿态确定其上行路由,再依据上行路由分配测站资源,如表4所示。
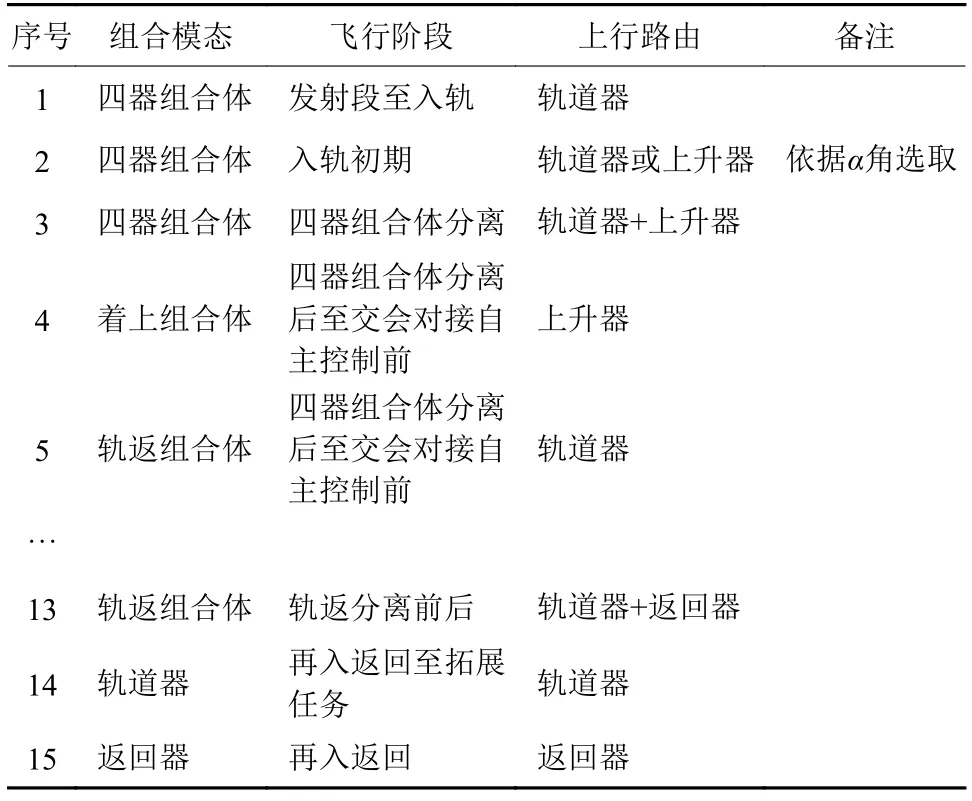
表4 各组合模态各阶段的上行路由确定策略Table 4 Uplink router object of each control object in different stages stages
3.3 四器组合体阶段上行路由选择
四器组合体阶段,上行路由可能为上升器、轨道器,任务规划时上行路由具体选取原则:①四器组合体状态下可以同时对轨道器和上升器进行上行捕获;②上行路由目标初始为轨道器,入轨后着陆器太阳翼解锁后上行路由目标切换为上升器;③分离当圈上升器和轨道器同时作为上行路由;④在四器组合体分离姿态建立前,正常情况下仅选定上行路由的一个点频上行捕获和发令。
如图5所示,定义探测器串联方向的+X轴与星站连线的夹角为α角。

图5 α角与β角示意图Fig. 5 Flowchart ofαangle andβangle
依据α角选取采用对地有利的半空间所对应的目标(+X轴半空间对应为上升器,–X轴半空间对应为轨道器)为上行路由目标,即:
1)若α≤90°,着陆上升组合体、轨道器和返回器共3个控制目标均选用上升器作为上行路由;
2)若α>90°,着陆上升组合体、轨道器和返回器共3个控制目标均选用轨道器路由目标的测控通道进行测控(着陆上升组合体和返回器的指令类型限制为间接指令和注入数据。如必须发送上升器直接指令,可通过上升器上行路由发送该指令);
3)在调姿引起的姿态变化期间,在α角过90°时刻切换上行路由。
若实时计算姿态与事先规划所用预报姿态不符造成实际上行路由切换时机变化,则按实时计算姿态匹配的上行路由同时进行地面测控设备切换和指令发送的上行路由切换。
4 多目标测控资源规划
测控资源分配采用先确定上行路由目标的跟踪测站集、再选测站的两步原则实施。
1)根据不同阶段的上行路由目标数量、测站跟踪数据、测定轨精度需求,确定不同阶段各个上行路由目标的跟踪测站集合。
2)根据测站等级选用一个测站作为上行控制主用站,其它测站为上行控制备用站和下行数据接收站。
4.1 上行路由目标跟踪测站集确定
根据各时段航天器/组合体的不同构型,采用分阶段、分目标、多优先级分时使用方式实施多个目标之间的测控资源的协同规划,相应的测站组合使用策略完成多目标跟踪任务。
1)四器组合体阶段,根据各时段选定一个上行路由目标,由该上行路由目标独占上行测控资源,必要时视资源裕度安排其它目标的下行数据接收。
2)四器组合体分离为轨返组合体和着上组合体两个组合体后,两个组合体根据各自姿态和对地指向选定的一个上行路由目标。根据两个上行路由目标测控需求及国内和国外布局[19],将全球布局测站按照中、东、西方位搭配使用的原则分为两组,每组测站分别各支持一个航天器,尽力确保测控覆盖率。
3)交会对接和样品转移过程,按双目标组合测控的方式实施,为尽力提高测控覆盖率和可靠度,对接过程在国内多个测站共视弧段内实施。每个航天器均按东西方位各一个测站搭配跟踪的方式,并在同波束满足时段实施双目标同波束干涉测量。
按上述原则,为各阶段各目标分配跟踪测站集合如表5所示。月面采样返回任务实施过程中,以往探月任务的航天器和本次任务多个目标同在月球表面或绕月轨道附近,测控弧段基本一致,首次火星探测任务“天问一号”与本次任务测控弧段呈周期性漂移的测控弧段冲突。为保证多个任务各目标控制过程协调一致性,进行了深空探测任务控制事件及资源的统一规划。在任务准备和实施过程中,按各任务目标的控制需求优先级进行重大控制事件及资源的预规划;在“嫦娥五号”任务内部,在各阶段不同航天器构型的上行路由进行测控资源预规划。

表5 各阶段各目标测站集Table 5 Station aggregate of each uplink object in different stages
4.2 上行主用测站选用及切换
4.2.1 上行主用测站选用原则
为确保提供重要任务可靠性,存在同一时段有多个测站同时具备跟踪能力的情形。为高效利用测控资源,需要进行测控资源的选优处理和接力跟踪处理。
1)根据测站等级不同,优先选用高优先级测站作为上行控制主用站,其它测站为上行控制备用站和下行数据接收站。
2)相同等级测站跟踪存在共视弧段时,按照仰角优劣、切换最少的原则进行测站选取。
(1)仰角优劣:优先跟踪仰角在指定角度范围的测控站,超出指定角度范围的时段正常不安排上行发令,优先级低于仰角较低测站。
(2)切换最少:为减少测站切换,多站同时进站时选用跟踪时段长的测站进行跟踪。
测站同时进站判断准则为若多站进站时间偏差ΔT小于时间阈值δ,视为多站同时进站。如图6所示,不妨假定测站A弧段的进单站遥控时刻为TICa,出单站遥控时刻为TOCb,捕获时长为ΔTCAPa,去捕时长为ΔTCLOSEa;测站B弧段的进单站遥控时刻为TICb,出单站遥控时刻为TOCb,捕获时长为ΔTCAPb,去捕时长为ΔTCLOSEb。
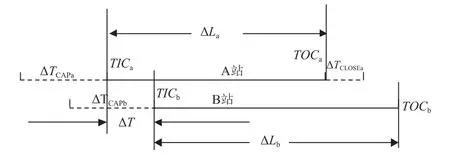
图6 多站同时进站判断准则Fig. 6 Judgement criterion for multiple-station simultaneous
多站进站时,对多站进行同时进站判断。以两站(命名为A、B两站)关系为例,判断准则如下:
判断A站和B站遥控进站时刻TICa和TOCb进站时差绝对值是否小于阈值δ。其中,ΔT=TICa–TOCb。
若ΔT≤阈值δ,则认为两站同时进站。
比较两站有效控制弧段长度ΔLaΔLb。若|ΔLa–ΔLb|≤阈值δ,则认为两站有效控制弧段长度相当,按默认优先顺序安排跟踪;否则,选用两站中有效控制弧段长度大的测站上行控制。
有效控制长度的最大值Mmax=max(ΔLa, ΔLb)。取有效控制长度长的弧段进行上行控制。
若ΔT>阈值δ,则认为两站为前后进站,先进站的先行上行。
4.2.2 测站上行切换时机确定
正常情况下,每个航天器在同一时刻只能采用一个测站实施上行控制。多站接力跟踪时,需要进行测站的交接班切换。飞控中心依据任务需求和测控条件,确定前一上行控制站与后一上行控制站的交接班时刻Talt。 交接班时刻Talt表示前一上行控制站完成关上行载波时刻,同时也为后一上行控制站开始开上行载波时刻。上行控制测站按照确定的交接班时刻,确定各自的有效遥控区间(即上行控制开始时刻至上行控制结束时刻)。
根据测站预报构造各个测站的单站有效控制弧段。不妨假定:测站A弧段的进单站遥控时刻为TIC1,出单站遥控时刻为TOC1,捕获时长为ΔTCAP1,去捕时长为 ΔTCLOSE1;测站B弧段的进单站遥控时刻为TIC2,出单站遥控时刻为TOC2,捕获时长为 ΔTCAP2,去捕时长为ΔTCLOSE2。
计算前站A去捕完成时刻T1=TOC1+ΔTCLOSE1,后站B捕获开始时刻T2=TIC2−ΔTCAP2。
若满足下列关系T1>T2,则认为测站A和测站B有效遥控区间搭接,如图7所示;否则,认为测站A和测站B不搭接。

图7 有效控制弧段搭接判断准则Fig. 7 Overlapping judgment criterion of valid uplink tracking arcs
对判定搭接的测站之间需进行上行控制权的交接处理。如图8所示,假定测站A、测站B的交接班时间Talt为Talt=T1,对两站的上行控制开始时刻、上行控制时刻处理如下:

图8 搭接测站的控制权交接处理Fig. 8 Uplink control transfer between overlapped stations
1)测站A的进单站遥控时刻为TIC1、出单站遥控时刻为TOC1不变,其有效遥控区间仍为[TIC1,TOC1];
2)测站B的出单站遥控时刻TOC2不变,修改对应测站B弧段的进单站遥控时刻为TIC2′=T1+ΔTCAP2。测站B对应弧段的有效遥控区间为[TIC2′,TOC2]。
4.2.3 测站上行点频确定
测控目标的上行路由和上行测站确定后,依据探测器天线对地指向判断选取的原则选取测站上行点频。假定月球探测器对称指向的两路测控天线分别对应测控f1和f2两个点频。如图5所示,定义f1点频的对应天线轴与星站连线夹角为β角,则:
1)上行路由为轨道器时,依据βg角确定点频;上行路由为上升器时,依据βs角确定点频;上行路由为返回器时,点频固定为fs;
2)航天器的β角 ≤ 90°时,采用f1点频;航天器的β角>90°时,采用f2点频。
5 多目标事件规划
飞控任务规划设计内容包括计划控制模式下的天地协同相关事件安排,包括航天器飞行控制事件设计、任务中心软件调度计划设计、测站调度与操作计划设计。在多目标有相互关联的飞行阶段,多个目标规划视为一个整体,统一设计,这样有利于不同目标之间飞控任务的相互协同,比如四器组合体联合控制阶段为四器统一设计,轨返组合体飞行及分离过程为轨道器、返回器两个目标联合任务规划等。其它没有相互关联的阶段,彼此独立设计,互不干扰。在多目标联合规划过程中,采用以重要事件特征点时刻为锚点进行多目标事件联合规划的方式进行统一规划。
5.1 飞控任务规划事件类型划分
采样返回飞控任务规划涉及的主要天地协同过程事件类型包括几个方面。
1)航天器飞行控制事件,包括轨道控制事件、姿态机动控制事件、遥控及注入事件、程控/延时指令事件、指令修正事件;
2)测站调度与操作事件,包括各测站跟踪、捕获、开关上行载波、加调/去调各类副载波/测距音、上下行码速率及编码方式设置、各类引导数据和跟踪数据的接收和发送等事件;
3)任务中心软件调度事件,包括与航天器飞行控制或地面测控网跟踪关联的软硬件状态设置或进程调度事件。
飞控任务规划设计在充分考虑地面测控跟踪条件下以航天器飞行控制事件为核心开展设计,其它类型事件以航天器飞行控制事件为主线进行匹配性安排。采样返回任务中,航天器轨道和姿态控制密集实施,从最优化控制角度考虑,轨道和姿态控制时机随轨道位置动态变化,在任务实施过程中实时进行各类数据修正。
5.2 轨道/姿态机动控制与关联飞控事件联合规划
采样返回飞行任务中一段时间内执行多次轨道机动或姿态机动成为常态,原来的轨道/姿态机动和关联飞控事件各自独立串行规划、计算带来的规划不一致风险愈加突出,流程时间较长,无法满足任务过程快速状态变化下对任务规划的时效性要求。面对任务复杂度的提升,设计了一种可并行开展一致性联合规划的方法。轨道/姿态机动控制和关联飞控事件联合规划的策略主要包括3个主要步骤:
1)依据任务使命进行任务飞行轨道/姿态机动设计,确定轨道/姿态控制时机和阶段划分,生成相关控制参数和预报数据;
2)依据航天器控制能力和地面测控能力进行,进行飞行控制事件细化标称设计,对飞行轨道/姿态控制设计进行迭代复核和必要修正;
3)依据任务实际和测定轨结果进行参数修正,关联事件规划进行相应更新和修正。
上述过程中,第1~2步在任务准备过程存在多轮迭代,直至在确保任务参数具有满足预定调整适应裕度指标的情况下取得最优解或可行解作为标称任务参数。在任务实际执行期间,执行第3步的参数修正和关键事件更新,正常应在任务裕度指标范围内,即关联事件安排为非冲突状态。对于应急或较低概率出现的冲突事件安排,则需要在继承之前标称任务参数确定的基础上快速重新从第1步开始进行测控条件分析,修正轨道/姿态机动参数直至得到无冲突事件安排结果,实施流程如图9所示。

图9 轨道/姿态机动控制与飞控事件联合规划流程示意图Fig. 9 Flowchart of trajectory and attitude maneuver control and flight control event combination planning processes
上述流程中,作为标称任务参数之一的轨道/姿态机动描述文件,即是任务准备阶段的结果文件,同时也是任务实施阶段的初始文件。该文件描述各航天器轨道/姿态机动的基本参数信息,主要包括机动编次相关信息、机动类型、机动开始时刻、目标姿态、机动时长等,如表6所示。

表6 轨道/姿态机动描述文件主要信息字段Table 6 Primary fields of trajectory and attitude maneuver control description file
6 采样返回在轨任务应用
本文所述月球采样返回探测任务规划与控制相关设计已成功应用于“嫦娥五号”任务飞行控制软件系统。任务准备阶段,任务中心对任务全程探测器飞行控制各类事件进行了统一规划,形成了任务各发射窗口标称规划基线版本。
2020年11月24日“嫦娥五号”任务探测器发射入轨至2020年12月17日返回器再入返回并成功着陆于内蒙古四子王旗,北京航天飞行控制中心(北京中心)成功实施了轨道器、返回器、上升器和着陆器四器的协同飞行控制数10次在轨任务规划,圆满完成了各航天器的上行控制指令发送和测控网资源分配调度,首次实现了中国月面采样封装、月面起飞、月球轨道交会对接、月地入射控制。
在任务各飞行阶段,北京中心依据实际测定轨参数进行了数十次规划数据更新。依据在轨飞行过程出现的风雨天气影响测站跟踪、空间环境引起的探测器状态调整、其它任务关联变化引起的测控资源调整等各类任务状态变化,进行了10余次任务过程测控资源和飞控事件重规划,所有规划结果均验证正确并成功实施。
在“嫦娥五号”任务期间,针对“嫦娥五号”探测器、“天问一号”环绕器、“嫦娥四号”任务中继卫星、“嫦娥三号”月面着陆器月面工作和探月工程三期再入返回试验任务服务舱等多个任务的多个控制目标分时共享深空测控网资源需求进行了多任务资源规划统一规划与调度。
7 结 论
本文根据月球采样返回探测任务需求进行飞控任务规划设计,重点解决了多目标复杂器间代传上行控制关系描述、多目标测控资源规划和多目标事件规划等技术难题,并在“嫦娥五号”任务中得到在轨实际应用。飞行控制的成功应用表明设计合理。本文所做相关设计可与具体任务过程解耦,可推广应用于后续的月球探测基地和载人登月等多目标复杂协同控制任务。限于多种因素,本次任务规划作业平台的图形可视化程度、功能集成度和智能化程度还有待提升。为进一步适应后续载人登月等任务需求,支持多目标多约束任务快速求解、支持图形可视化交互、支持多用户协同的任务分析与规划集成环境是未来的发展方向。