膝关节置换手术导航系统精度测量方法及实现
2022-05-06郑立夫
郑立夫
北京市医疗器械检验研究院,北京101111
前言
全膝关节置换术(Total Knee Replacement,TKR)是解决膝关节严重病损患者活动功能的最有效方法之一,能够有效提高患者的生活质量[1-4]。但是目前传统的人工膝关节置换手术非常依赖临床医生的经验[5],其由于假体松动、脱位、断裂和感染噪声导致的手术失败率达5%~8%[6-8]。
相比于传统的人工膝关节置换手术,膝关节置换手术导航系统将计算机图像处理与机器人精准规划结合起来[9-11],对受力与运动分析进行智能化评估[12-13],辅助临床医生完成膝关节置换手术,能够降低手术损伤,减少手术时间,提高手术成功率与质量[14-16]。
然而膝关节置换手术导航系统的精度受到多种因素的影响[17-19],例如光学跟踪仪的跟踪精度、机械臂的定位精度、图像配准的精度等,所以需要对膝关节置换手术导航系统的精度进行精准的检测[20-23]。本文提出了一种膝关节置换手术导航系统精度检测方法,能够快速、精准、简便的完成检测工作。
1 材料与方法
检测系统由硬件系统和测试方法两部分组成,其中硬件系统包括激光跟踪仪、定位靶球、骨锯模拟工装3个部分;测试方法包括导航定位位置准确度检测、定位位置重复性检测、定位姿态准确度检测、定位姿态重复性检测4个部分。
1.1 硬件系统
1.1.1 激光跟踪仪 膝关节置换手术导航系统的检测精度在亚毫米级别,为了保证测试准确性,检测系统采用美国自动精密工程公司(API)研发的激光跟踪仪Radian,如图1 所示。其检测精度能够达到1 nm,每秒钟采集数据1 000次。该设备具有自动跟踪锁定靶球的功能,使用者可以自由移动靶球并记录靶球在激光跟踪仪坐标系统中的空间位置。该设备可以对空气温度、空气湿度、材料温度、大气压力等环境因素进行评估与补偿,保障了检测精准。

图1 API激光跟踪仪RadianFigure 1 API laser tracer,Radian
1.1.2 定位靶球 在使用激光跟踪仪Radian进行检测时,需要在被测试物体表面上进行移动与标记,为了保证移动标记时的稳定性,系统采用半径为1.5 寸的球形定位靶球,如图2所示。该定位靶球采用三角开口、中空一体式设计,光学玻璃角偶反射球体保证了长期检测的稳定性以及球心高精度。
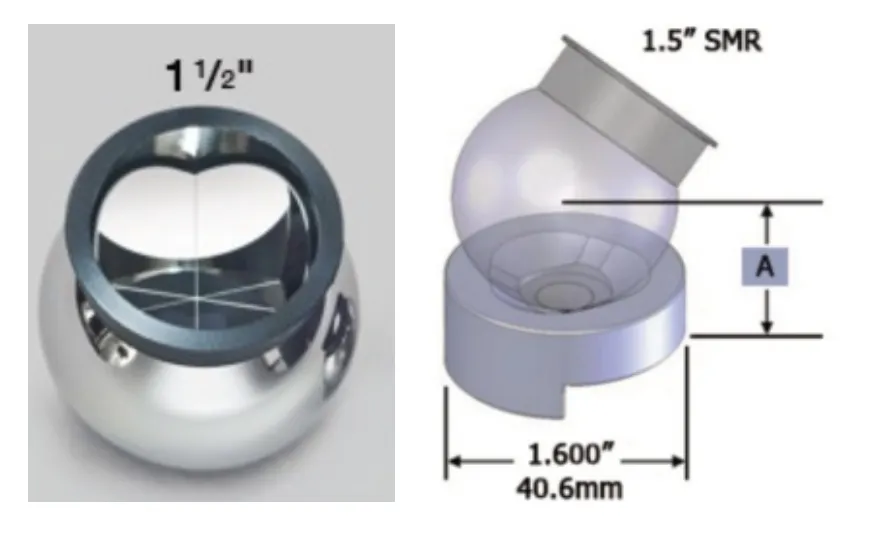
图2 定位靶球Figure 2 Spherically mounted retro-reflectors
1.1.3 骨锯模拟工装 膝关节置换手术导航系统的目标是将用于截骨的骨锯摆位到术前规划的平面,保证骨锯平面与术前规划的截骨平面完全重合。为了方便对膝关节置换手术导航系统的骨锯摆位精度进行检测,检测系统中设计了一个骨锯模拟工装,如图3 所示。该工装使用光敏树脂材料通过3D 打印获取,代替膝关节置换手术导航系统的机械臂前端的骨锯,通过机械臂连接孔位与机械臂直接相连,通过骨锯模拟平面模拟骨锯所在平面。检测实验中,膝关节置换手术导航系统通过标定工装的骨锯模拟平面,将骨锯模拟平面摆位到术前规划的平面,保证与术前规划的截骨平面完全重合。
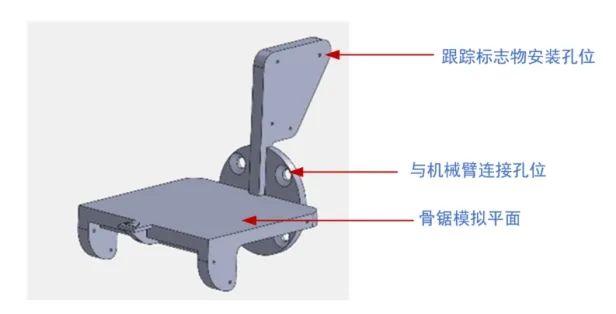
图3 骨锯模拟工装Figure 3 Saw simulation tool
1.2 测试方法
1.2.1 导航系统定位位置准确度检测 膝关节置换手术导航系统的定位位置准确度检测过程分为以下4个步骤。
(1)定义1个截骨平面α,将一个定位靶球在截骨平面上移动,通过激光跟踪仪记录该定位靶球在空间中的位置,依据获得的定位靶球所有空间位置,拟合得到平面α的平面方程:

其中,A1,B1,C1,D1为三维平面α参数。
(2)将骨锯模拟工装安装在膝关节置换手术导航系统机械臂前端,将平面α作为截骨目标平面,m次手动移动机械臂至接近截骨平面位置,膝关节置换手术导航系统执行骨锯摆位操作,完成骨锯模拟工装摆位。
(3)将定位靶球在骨锯模拟工装的骨锯模拟平面上移动,通过激光跟踪仪记录定位靶球在空间中的n个位置aij,记录aij的空间位置为(axij,ayij,azij) ,其中,i= 1,2,…,m;j= 1,2,…,n。
(4)计算所有空间位置aij与平面α的空间距离平均值即膝关节置换手术导航系统定位位置准确度:
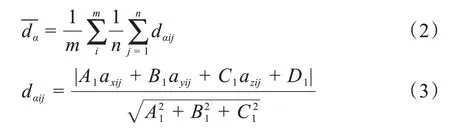
其中,dαij表示空间位置aij与平面α的空间距离。
1.2.2 导航系统定位位置重复性检测 膝关节置换手术导航系统的定位位置重复性检测过程分为以下3步骤。
(1)重复膝关节置换手术导航系统的定位位置准确度检测步骤,依据所获得的m×n个aij,拟合得到骨锯模拟工装的平面β的平面方程:

其中,A2,B2,C2,D2为三维平面β参数。
(2)计算空间位置aij与平面β的空间距离平均值
其中,dβij表示空间位置aij与平面β的空间距离。
(3)膝关节置换手术导航系统的定位位置重复性计算如下:

其中,Sβ表示空间位置aij到平面β的偏差,计算公式如下:

1.2.3 导航系统定位姿态准确度检测 膝关节置换手术导航系统的定位姿态准确度检测过程分为以下3个步骤。
(1)重复膝关节置换手术导航系统的定位位置准确度检测步骤,依据第i(i= 1,2,…,m)次手动移动机械臂至接近截骨平面位置时获得的n个位置aij(j= 1,2,…,n),拟合得到第i次骨锯模拟工装的平面βi(i= 1,2,…,n)的平面方程:

其中,A2i,B2i,C2i,D2i为三维平面βi参数。
(2)计算平面βi与平面α的夹角θβiα:

(3)m次自动摆位的角度误差平均值即膝关节置换手术导航系统的定位姿态准确度,计算公式如下:

1.2.4 导航系统定位姿态重复性检测 膝关节置换手术导航系统的定位姿态重复性检测过程分为以下5个步骤。
(1)重复膝关节置换手术导航系统的定位位置准确度检测步骤,依据所获得的m×n个aij,拟合得到骨锯模拟工装的平面β的平面方程式(4)。
(2)依据第i(i= 1,2,…,m)次获得的n个位置aij(j= 1,2,…,n),拟合得到第i次骨锯模拟工装的平面βi(i= 1,2,…,n)的平面方程式(9)。
(3)计算平面βi与平面β的夹角θβi β:

(4)计算m次自动摆位的角度误差平均值

(5)则膝关节置换手术导航系统的定位姿态重复性:

2 实验结果
将本检测系统应用于在北京市医疗器械检验研究院进行检测的膝关节置换手术导航系统,对导航系统的定位位置准确度、定位位置重复性、定位姿态准确度、定位姿态重复性4个部分进行检测。实验步骤如下:(1)激光跟踪仪、膝关节置换手术导航系统摆放在合适的位置,按照说明书启动,如图4 所示。并建立激光跟踪仪坐标系,如图5所示。(2)将骨锯模拟工装安装在机械臂前端。(3)在膝关节置换手术导航系统规划好截骨平面,并将定位靶球在截骨平面上移动,通过激光跟踪仪记录定位靶球在空间中的30 个位置。(4)手动拖动机械臂前端到达合适的初始位置,导航系统自动将骨锯模拟工装摆位到截骨平面处。(5)将定位靶球在骨锯模拟工装的骨锯模拟平面上移动,通过激光跟踪仪记录定位靶球在空间中的30 个位置。(6)重复步骤(4)与步骤(5)共计8 次,计算导航系统的定位位置准确度。(7)重复步骤(3)、步骤(4)与步骤(5),计算导航系统的定位位置重复性、定位姿态准确度、定位姿态重复性。

图4 实验环境Figure 4 Test environment
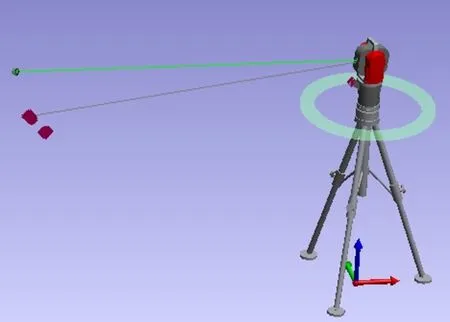
图5 激光跟踪仪坐标系Figure 5 Laser tracker coordinate system
2.1 定位位置准确度
定位位置准确度测试主要目的:当用户通过术前规划计算得到骨锯需要摆放的空间位置后,系统能够准确地执行该指令,通过机械臂将骨锯平面移动到用户期待的位置,然后用户可以操作系统完成截骨操作。
定位位置准确度检测实验中,在固定截骨平面的基础上,机械臂共计自动摆位8 次,每次自动摆位在骨锯模拟工装上采集30 个测试点,计算得到的定位位置准确度结果分布如图6所示。8次重复实验的最大误差为1.341 mm,最小误差为0.779 mm。本次定位位置准确度检测实验数据表明,被测试系统满足临床关节置换手术对于导航系统定位位置误差在2.0 mm之内的要求。
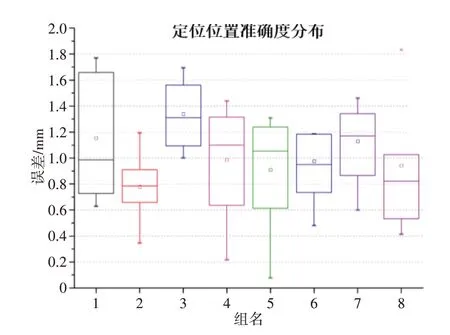
图6 定位位置准确度统计Figure 6 Positioning location accuracy analysis
2.2 定位位置重复性
定位位置重复性测试主要目的:当用户频繁的将骨锯拉离规划的截骨平面后,系统能够重复、准确的通过机械臂将骨锯摆放到原来规划的截骨平面,然后用户可以继续操作系统完成截骨操作。
定位位置重复性检测实验中,共计规划了8个截骨平面,计算得到的定位位置重复性结果如表1 所示。8 次重复实验的最大误差为1.907 mm,最小误差为1.254 mm。因为手术过程中的遮挡或者保护不应触碰的组织器官,用户会经常调整骨锯的摆放位置或者患者的体位,本次定位位置重复性检测实验数据表明被检测的导航系统重复到达同一平面的位置精准度很高。

表1 定位位置重复性(mm)Table 1 Positioning location repeatability(mm)
2.3 定位姿态准确度
定位姿态准确度测试主要目的:当用户通过术前规划计算得到骨锯需要摆放的空间姿态后,系统能够准确的执行该指令,通过机械臂将骨锯平面调整到用户期待的姿态,然后用户可以操作系统完成截骨操作。定位姿态准确度检测实验中,在固定截骨平面的基础上,每次在骨锯模拟工装上采集30 个测试点,拟合得到骨锯模拟工装平面,机械臂共计自动摆位8次,计算得到的截骨平面与骨锯模拟工装平面的夹角分布如图7 所示,最大误差为1.029°,最小误差为0.621°。本次定位姿态准确度检测实验数据表明,被测试系统满足临床关节置换手术对于导航系统定位姿态误差在2.0°之内的要求。

图7 定位姿态准确度Figure 7 Positioning orientation accurancy
2.4 定位姿态重复性
定位姿态重复性测试主要目的:当用户将骨锯拉离规划的截骨平面,或者调整患者体位后,系统能够重复、准确的通过机械臂将骨锯摆放到原来规划的截骨平面,用户可以继续完成之前没有完成的截骨操作。
定位姿态重复性检测实验中,在固定截骨平面的基础上,每次在骨锯模拟工装上采集30个测试点,拟合得到骨锯模拟工装平面,再依据所获取的所有测试点和骨锯模拟工装平均平面,计算得到骨锯模拟工装平面与骨锯模拟工装平均平面的夹角。8 个截骨平面计算得到的定位姿态重复性结果如表2 所示,最大误差为1.882°,最小误差为1.227°。因为手术环境复杂,用户会经常调整骨锯的摆放位置或者患者的体位,本次定位姿态重复性检测实验数据表明被检测的导航系统重复到达同一平面的角度精准度很高。

表2 定位姿态重复性(°)Table 2 Positioning orientation repeatability(°)
3 讨论
根据我国卫健委发布的人工关节置换技术管理规范,关节置换手术需要医生具备10年以上的骨科临床经验。而且手术创伤大,术后恢复期长,超过30%患者对手术效果不满意,手术平均准确度在55%左右。对比传统关节置换手术,手术导航系统优势显著,相比于传统徒手操作,手术机器人辅助可以让手术方案直观呈现并且及时调整;手术效果好,安全性更高;患者创伤小,术后恢复快;并且缩短医生学习周期,所以目前国内已有很多企业开始进行研发。
对于新兴的膝关节置换手术导航系统临床使用的安全性、有效性、鲁棒性需要进行严格、精准、快速的测量,依据行业标准YY/T1712-2021中对于采用机器人技术的辅助手术导航系统的检测项目,本文提出了一种针对膝关节置换手术导航系统定位位置准确度、定位位置重复性、定位姿态准确度、定位姿态重复性的检测方法,该方法通过激光跟踪仪对导航系统定位的截骨平面进行空间位置采集,能够精准、快速的检测导航系统精度,易于理解与重复操作,能够提高检测效率。
系统的定位位置准确度和定位位置重复性主要保证用户在使用系统的过程中,能够准确完成规划的截骨量,不会出现截骨不够或者过截的现象。系统的定位姿态准确度和定位姿态重复性,主要保证用户在使用系统的过程中,股骨与胫骨力线能够完美重合。所以本文将定位位置准确度、定位位置重复性、定位姿态准确度、定位姿态重复性作为膝关节置换手术导航系统的主要检测项目。
本文将提出的检测方法对一台膝关节置换手术导航系统精度进行检测,得到定位位置准确度位于[0.779 mm,1.341 mm]区间、定位位置重复性位于[0.693 mm,1.124 mm]区间、定位姿态准确度位于[0.621°,1.029°]区间、定位姿态重复性位于[1.227°,1.882°]区间。实验结果表明,本文提出的检测方法能够精确计算得到导航系统精度,且具有良好的重复性,更方便用于膝关节置换手术导航系统检测。
因为临床手术环境复杂,随机性比较高,对膝关节置换手术导航系统的鲁棒性与精确度要求高,检测过程难以覆盖所有临床场景,在今后研究中,将从临床手术复杂场景作进一步进行考虑。