断裂线辅助机载LiDAR生产DEM的应用探讨
2022-05-05王婷婷
王婷婷
(甘肃省测绘工程院,甘肃 兰州 730010)
在1∶1万基础测绘项目中,长期采用传统的航测方法进行数字高程模型(Digital Elevation Model, DEM)生产。为了应用机载LiDAR((Light Detection and Ranging))这项新技术,甘肃省第一次在省级1∶1万基础地理信息更新项目黄河干流临夏永靖至黄河石林三维场景构建项目中,使用最新的机载LiDAR点云数据生产1∶1万DEM产品。
本文介绍了以机载LiDAR数据作为数据源制作DEM过程中,在通过专业软件对点云数据进行自动分类处理的基础上,认真分析和研究采用添加断裂线的方式对点云数据进行修正,总结技术方法和生产经验,探讨断裂线辅助LiDAR生产DEM的作业方法、关键技术及解决方案。
1 测区及数据概况
黄河干流临夏永靖至黄河石林段测区位于黄河上游,地处甘肃省中部,地貌特征以基岩山地和山间盆地为主,西北部大地构造属祁连山脉东延部分。黄河将境内地形分为西北与东南两部分,且分别由西北与东南向黄河河谷倾斜。测区内有植被茂密区、陡石山地貌、甘肃特色居民居住区、大型河流水库等多种地类地貌,基本涵盖了甘肃省境内的地形地貌特色。
本测区航空摄影工作由河北翔通信息技术有限公司承担完成,LiDAR点云数据由GALAXYPRIME航摄仪获取,影像数据采用UCXPWA航摄仪进行航空摄影。本测区共分为3个航摄分区,分区编号为01、02、03,摄区代号为20019,其中LiDAR点云数据航摄仪编号为5060423,绝对航高为5 900 m,点间距优于2 m;影像数据航摄仪编号为70311155,01分区绝对航高为5 900 m,02、03分区绝对航高分别为5 900、6 200 m,本测区影像地面分辨率均为0.4 m。
2 激光LiDAR数据生产DEM的原理及数据处理流程
2.1 LiDAR数据生产DEM的原理
作为一种新兴的空间主动式对地观测技术,机载LiDAR,即激光探测与测量,利用GPS(Global Position System)和IMU(Inertial Measurement Unit)机载激光扫描,其所得的数据可以量测地面物体的三维坐标,表示为数字表面模型(Digital Surface Model, DSM)的离散点,且含有激光强度信息。点云应用分类技术在这些原始数字表面模型中消除建筑物、人造物、植物覆盖等量测点,即可获得DEM,并同时得到地面覆盖物的高度。它快速获得地物的三维坐标和准确的高分辨率DSM,具有自动化程度高、受天气影响小、数据生产周期短、精度高等特点[1-4]。
2.2 LiDAR数据生产DEM的处理流程
2.2.1 坐标系统转换
LiDAR点云数据提供的原始数据资料包括:原始点云数据、预处理点云数据、IMU/GNSS(Global Navigation Satellite System,全球导航卫星系统)数据文件。数据平面坐标系为2000国家大地坐标系,高斯-克吕格投影,中央经线为102°、105°,高程系统为大地高。为满足生产需求,原始点云数据在使用时应首先利用甘肃省似大地水准面精化成果将大地高转换为正常高后再进行修测。
2.2.2 数据分块
读取不同航带的机载激光雷达点云数据,由于点云数据量太大,生产时需要对点云数据进行分块,分块尺寸根据数据处理软件、硬件性能确定,本测区统一按照1∶1万标准图幅进行分块。
2.2.3 点云滤波
点云滤波主要是利用自动算法将点云数据按照噪声点、地面点和未分类点进行分类,分别存放在相应的地类中。
2.2.4 分类编辑
点云分类是点云数据处理阶段的主要工作。由于在DEM生产过程中,只需要利用地面点,而滤波后的点云可能存在错分、少分或多分的情况,因此,分类编辑主要是对滤波后点云中不属于地面的点采用人工添加断裂线的方式进行重新分类,并通过分类编辑存放在相应的类别中。分类编辑过程中可参考相应区域同期生产的DOM(Digital Orthophoto Map,数字正像影像)或DEM晕渲图,便于解译。
2.2.5 断裂线的采集
通过点云分类显示、高程显示等方法,目视检查分类编辑后的点云,对有疑问的区域采用断面图进行查询和分析。按照辅助反映地表、地物原貌信息的原则切准模型,采集带有高程信息的特征线,如道路边线、河流边线、面状水域(湖泊、水库、池塘等)范围线等。
2.2.6 构建不规则三角网
利用编辑后的点云中的地面点和断裂线完成不规则三角网(TIN)的构建,将其按规定的5 m × 5 m格网尺寸进行内插,生成DEM。
2.2.7 高程精度检测
利用外业控制点和检查点检测DEM高程精度,通过统计结果可以看出,DEM产品的高程精度不仅达到了项目生产的要求,而且精度都较高。精度统计情况如表1所示(部分)。

表1 精度统计情况(部分)
3 断裂线在人工干预点云分类中几种特殊情况的处理方法
由于本测区内水库、湖泊、河流等易形成镜面反射的区域较多,易造成LiDAR点云反射率偏低;森林植被覆盖密集,对LiDAR点云的穿透有影响,地面点的反射率偏低,并且对像控点的施测带来一定的困难。
对于前期点云自动分类时被少分、错分或是难以区分的地物,要对点云数据添加断裂线进行约束,反映真实地貌,保证分类精度。断裂线辅助机载LiDAR进行DEM的生产,遵循“所见即所得”的原则,采用逐一分辨解决的办法,将所有分类不全、分类错误的噪声点去除。以下分4种情况对添加断裂线的情况举例说明。
3.1 依山而建的建筑物
建筑物四周常高于建筑物的地基地面,建筑物的地基与四周的陡坎或斜坡存在高差,使得分界线在陡坎或斜坡与建筑物周围地基之间比较模糊。如果按照点云真实情况,会生成一个错误的DEM,即倾斜的房屋地基面。同时,树木容易遮挡此类建筑物四周,采集不到地面点云,无法将建筑物真实轮廓显现出来。
处理方法为:对照影像添加断裂线。断裂线的高程是以建筑物周围正确的地基高程为准,将建筑物四周地基修改到一个平面,恢复平滑地形。此种情况处理前后如图1所示。
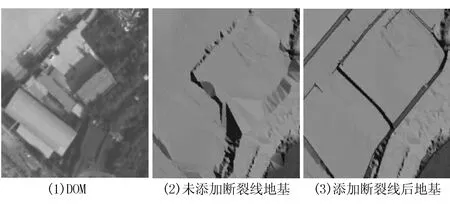
图1 人工处理依山而建建筑物点云
3.2 水面处理
对固定或流动水域,以及河流、湖泊等面积较大的无数据水体区域,应采集水涯线作为特征线,其中,流动水域的高程应根据上下游水涯线高程进行分段赋值,以便真实地反映水面状态。
处理方式分别为:
①范围封闭的固定水域,如大型水库、蓄水池、鱼塘等,高程以摄影时的静止水位为基础;
②范围开放的流动河流,如黄河、长江等,存在较大的高差在上下游河流水面之间,要由高到低缓慢过渡表示断裂线。
此种类型处理前后如图2所示。
3.3 地面上的道路或防护带情况
地面上的人行道、隔离带等,很大一部分被树木遮挡,只能获取到极少量的地面点云数,其真实地表状态判读困难。为了真实反映树木遮挡部分的DEM高程,生产时主要参考同期影像[5-7]。
处理方法为:要保留被树木遮挡的地面上的人行道、防护带、花坛等地面点,必须参考同一条绿化带或花坛等的地面点,添加断裂线将高程信息补充完整,且需人工找回被自动滤波时削平的植被茂密的山顶点云。此种类型处理前后如图3所示。
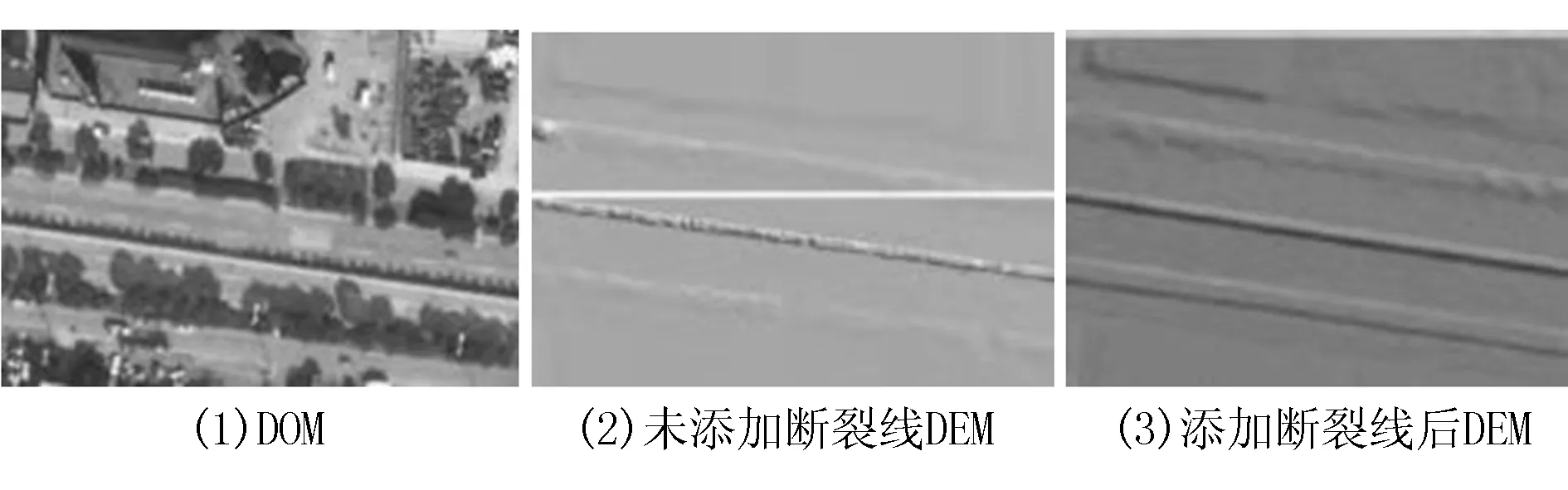
图3 人工处理街道绿化带点云数据
3.4 高架路、立交桥等
架空于地面或水面上的人工构筑物,很容易将高架路、桥梁等地物离散点作为地面点被错误分类,要想保留地面或水面上的点云数据,就必须分析同期DOM影像数据,进行人工干预。此种类型处理前后如图4所示。
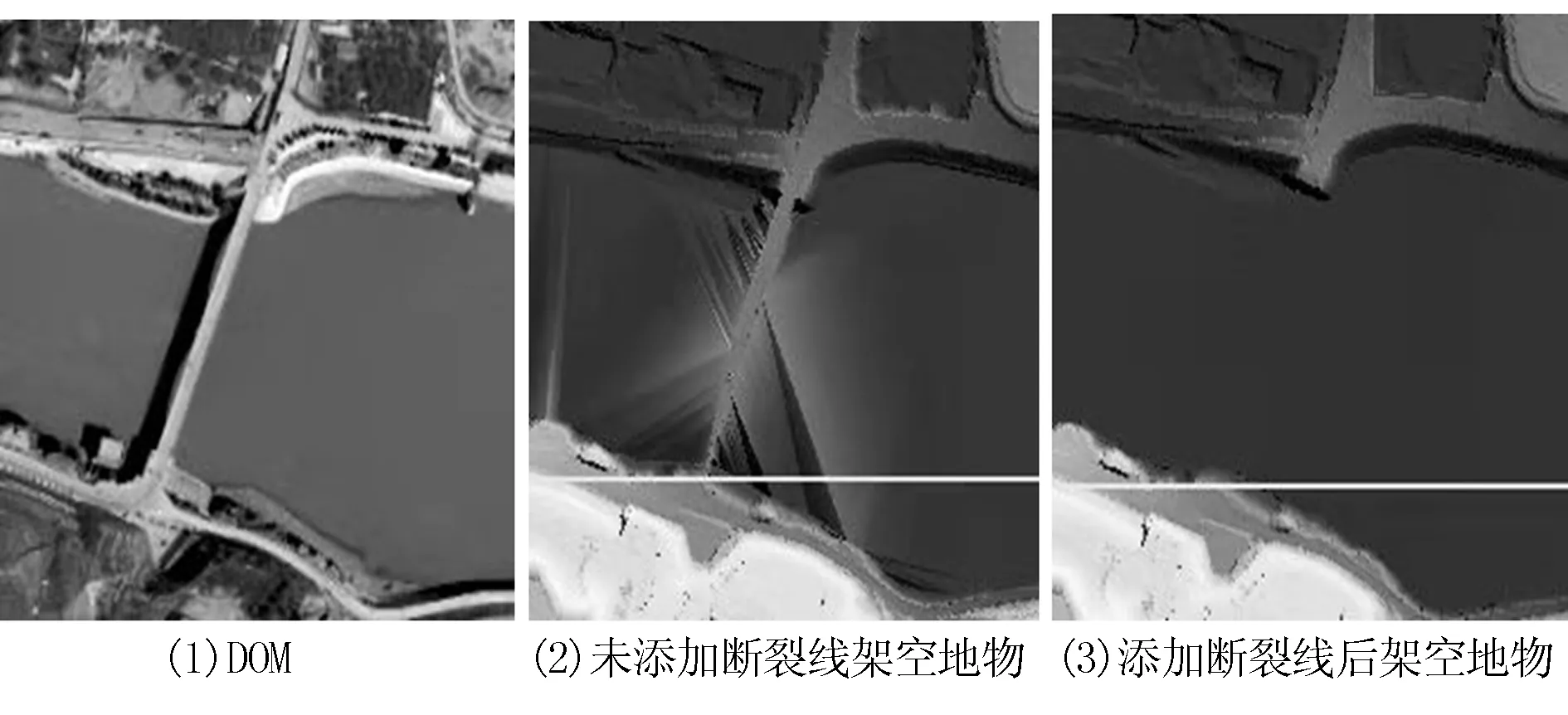
图4 架空地物添加断裂线处理后效果对比
4 结束语
在黄河干流临夏永靖至黄河石林三维场景构建项目中,利用机载LiDAR数据获取的离散点,因为被建筑物和植被遮挡,空间分布不规则,未能将真实地形通过点云表现出来,且存在分类不全、分类错误的现象,目前任何专业软件自动分类处理点云数据都解决不了这一问题,无法直接生产DEM。出现这种情况,就需要对错误点云数据采用人工干预,即人工添加断裂线的方式进行修改。本文论述了在生产黄河流域1∶1万DEM过程中,机载LiDAR数据遇到的实际问题及处理方法,对断裂线辅助机载生产DEM的技术进行探讨,使DEM产品精度和生产效率得到了极大提高,对今后甘肃境内同类型基础测绘项目的DEM生产提供了实践经验,具有借鉴和指导意义。 作为一项新兴技术,机载LiDAR技术具有传统摄影测量和地面常规测量技术无可比拟的优越性,广泛用于基础测绘、摄影测量、三维可视化、数字城市等众多行业,应用需求量大,发展前景广阔[8-9]。激光雷达技术使DEM生成、地物要素的自动提取更加便捷。LiDAR获取的地面点云数据通过专业数据处理软件处理后,很容易融合到其他数字地理信息产品中,极大地缩短了各种地理信息产品的生产更新周期,提高了生产地理信息产品的效率和使用的现势性[10]。
