矢量控制下的车用IPMSM电机转矩控制*
2022-05-04王旭斌和豪涛
王旭斌,和豪涛
(河南交通职业技术学院汽车学院,河南 郑州 450000)
IPMSM是将永磁体嵌入或内装在转子铁心内的永磁同步电机,相对于SPMSM,其能够有效利用磁阻转矩,提高转矩/电流比;还可降低永磁体励磁磁通,减小永磁体体积,有利于弱磁运行,扩展速度范围;具有低速输出大扭矩、高速输出大功率的工作特性,在电动汽车,特别是纯电动汽车上作为驱动装置广泛使用。IPMSM的控制方法有开环控制的恒压频比控制、闭环控制的矢量控制和直接转矩控制。其中,矢量控制技术是借鉴他励直流电动机电枢电流和励磁电流相互垂直,没有耦合及可独立控制的思路,以坐标变换理论为基础,通过对电机定子电流在同步旋转坐标系中大小和方向的控制,达到对直轴和交轴分量的解耦目的,从而实现磁场和转矩的解耦控制;矢量控制更多采用空间矢量调制技术SVPWM获得准圆形旋转磁场。
IPMSM电机的控制对象有转速控制和转矩控制。目前,对电机的转速驱动控制技术研究较多,而全速域下驱动和制动的转矩控制研究不多。在车辆行驶中,巡航行驶时,电动汽车IPMSM电机工作于转速控制;而车辆一般行驶时,运行转速大都由驾驶员来控制,驾驶员根据当前车速以及需求车速对IPMSM电机进行转矩控制,决定加速和减速。此外,电动汽车IPMSM驱动电机的控制还包括电机系统的上下电控制,电机上下电控制较多采用基于整车State机制的控制策略。电动汽车转矩控制涉及驱动和制动两种工况,由整车控制器根据车辆的实际运行情况,即车速、挡位、电门踏板开度、制动踏板开度、电池SOC值等状态信息,来决定电机的输出转矩/功率。当电机控制器接收到整车控制器发出的驱动转矩输出指令后,就将动力电池提供的直流电转化为三相交流电,驱动电机输出转矩;当电机控制器接收到整车控制器发出的制动转矩输出指令后,就将电机反电动势能量供给动力电池,电机输出制动转矩。矢量控制下的转矩控制相对于转速控制,仅保留电流环参与控制,如图1所示,关键是性能要求下的指令转矩情况及其参考电流的确定。

图1 转矩控制系统
1 电机特性
对电机的控制,根本是对电枢电流的控制,而参考电流受制于电机的工作特性。基于矢量控制下的IPMSM电机数学模型如下:

根据定子电压方程及电压约束方程,以一定的电流,,即恒转矩运行过程中,将所需定子电压随转速达到电压极限值时的转速范围称为恒转矩控制区,电机实施变压变频控制。不同恒转矩值下的转速不同,恒转矩值越高,电压极限椭圆的两轴半径越大,可达到的最高转速越低。通常,额定转矩下,电压达到极限值的转速称为基速。峰值转矩下的最大转速称为转折速度。越过恒转矩控制区,为了扩大转速范围,通过减小对d方向的转子磁链减弱,即弱磁控制区,电机实施恒压变频控制。
由转矩方程知,在电动机结构确定后,电磁转矩的大小将决定于定子电流的两个分量。而且,对每一个,和都有无数组合与之对应。这就需要确定对两个电流分量的匹配原则,也就是定子电流的优化控制问题。显然,优化目标不同,两个电流分量匹配的原则和控制方式便不同。
电动机在恒转矩运行区,铁耗不是主要的,而铜耗占的比例较大,通常选择最大转矩/电流比(MTPA)来控制定子电流,这样不仅使电动机铜耗最小,还减小了逆变器和整流器的损耗,可降低系统的总损耗,还利用弱磁效应充分利用了电机的磁阻转矩。由转矩公式在-平面内得到恒转矩曲线族,如图2a所示(图中转速信息针对弱磁控制区,低于MTPA线对应最大转速的转速没显出),每一条恒转矩曲线上有一点与坐标原点最近,这点便与最小定子电流相对应。将各条恒转矩曲线上这样点连起来就确定了最小定子电流矢量轨迹MTPA曲线OA。A点是峰值转矩对应的工作点,可见,其恒转矩控制的转速最小。给定指令转矩,根据计算速度和精度,求解MTPA曲线上的,的具体实现有较多方法,常用的有公式解析计算及其改进公式、查表法及智能控制算法等。
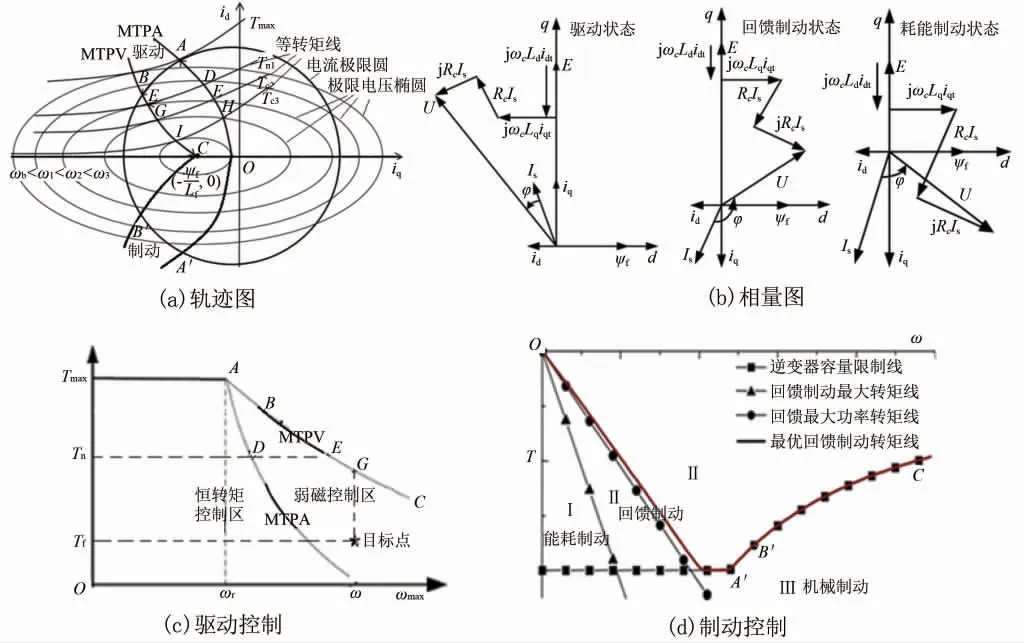
图2 IPMSM运行控制图
在弱磁控制区,典型曲线有等转矩曲线族DE/FG/HI、最大输出功率曲线:电流极限圆曲线(极限电压电流约束下,各转速下输出转矩最大值的连线AB)和最大转矩电压比MTPV曲线(极限电压约束下,各转速下输出转矩最大值的连线BEGIC)。给定指令转矩,计算各等转矩曲线对应的,公式解析法几乎不可能,常用的有梯度法及查表法;电流极限圆曲线和最大转矩电压比MTPV曲线对应的,计算有公 式 解 析 计算、查表法或梯度法及超前角控制等。采用查表法,使用MTPA、等转矩曲线和MTPV控制,某电机驱动及制动过程指令电流随转速和转矩变化如图3所示。

图3 指令电流i d,i q随转速和转矩变化云图
2 驱动转矩控制
当汽车处于起步、加速减速、停车、爬坡等工况时,需要较高的转矩,电机主要运行在恒转矩控制区,当汽车运行在较高车速、超车等工况时,电机转速在基速以上,电机主要运行在弱磁控制区。对照图2c所示,以额定转矩作为指令转矩,恒转矩起动驱动负载转矩,先在恒转矩控制区以MTPA控制运行至点D,然后进入等转矩弱磁控制区运行至点E,而后沿MTPV控制线到目标转速对应的点G后,指令转矩降为负载转矩值,电机等速运转。只要在达到目标转速前,指令转矩大于负载转矩达到目标转速时,指令转矩等于负载转矩,电机便等速运转,这样有无数过程选择。在驱动转矩控制中,是否进入弱磁控制区与目标转速有关;弱磁区如何控制,与性能目标有关,文献[3]给出了弱磁区的最优驱动控制。作为比较,阶跃转速控制下的起动和制动过程,为了响应时间较短,电机各转速点工作于峰值或最大转矩状态,对应图2(a、c、d)中OABC曲线或CB'A'O曲线。
3 制动转矩控制
电动汽车使用了液压制动和电机再生回馈制动组成的混合制动,滑行制动时主要是电机再生回馈制动起作用,踏板制动时液压制动和电机再生回馈制动共同参与,两者有并联和串联控制两种方式,纯电动车较多采用并联控制,混合动力车较多采用串联控制。根据车辆驱动形式及控制要求,又有具体的实现方法。电机制动转矩控制是设计混合制动中制动力分配控制的基础。
由转矩方程,电机制动时输出转矩为负值,相对驱动转矩控制,只需控制<0即可,电磁参数关系变化如图2b所示。在SVPWM调制控制下,逆变电路工作于可控整流状态,制动电流和电枢电压仍受到极限值的约束。根据电机输入功率正负值,将制动过程分为高速弱磁区回馈制动和低速恒转矩能耗制动,如图2d所示。在分界线上可进行最大回馈电磁转矩控制,在回馈制动区可进行回馈最大功率、考虑损耗的最优回馈及电机发电效率最优等转矩控制。制动时,根据初始转速大小,电机将经历高速的回馈制动或低速的能耗制动。文献[8]给出恒转矩驱动制动仿真,从中可看出转矩控制跟踪及,变化情况。
4 结语
IPMSM电机的工作特性数学方程是分析及进行矢量控制下IPMSM电机转矩控制的基础。利用工作轨迹图、特性曲线图及相量图的对应关系是理解和开发驱动制动各控制区进行转矩、功率或效率等最优控制策略的途径,控制曲线,值的计算获得也是研究的热点。
