基于Infineon Aurix系列单片机的永磁同步电机位置两种检测方案的设计
2022-05-04闫永亮范阳波吴小萍谭艳军林霄喆
闫永亮,范阳波, 吴小萍, 谭艳军, 林霄喆
(1.宁波上中下自动变速器有限公司,浙江 宁波 315800;2.宁波吉利罗佑发动机零部件有限公司,浙江 宁波315800)
1 引言
随着新能源汽车的普及和推广,车用永磁同步电机由于其优良的性能,应用越来越广泛。为了保证电动汽车具有良好驾驶的舒适性和操控性,需要能够准确地控制永磁同步电机的状态,实时检测电机转子的位置信息。检测电子转子位置信息的传感器有电涡流传感器、旋转变压器以及光电编码器。旋转变压器很多优点,比如较强的抗干扰能力、较优的耐振动性能和很高的采样精度。
目前绝大多数的电机生产厂商都是采用旋转变压器方案进行电机转子位置检测。本文在详细介绍旋转变压器原理的基础上,针对旋转变压器激励信号要求和输出信号调制要求分别设计了电路方案,提出了硬件解码和软件解码两种设计方案的思路。
2 旋转变压器的工作原理
旋转变压器的转子由叠层磁性钢片组成,而定子则由两部分组成,分别是励磁线圈和输出线圈。其结构示意如图1所示,其中R是励磁线圈,S和S是输出线圈绕组。当原边励磁线圈施加正弦激励交流电压信号时,由于电磁感应的原理,两相副边输出线圈感应出随电机轴角变化的交流电压,由于两相输出线圈结构上的特性,两相输出电压信号在相位上相差90°。因此,通过专用电机位置解码芯片,将输出线圈中感应到的两相正弦和余弦电压信号,利用专用旋变-数字转换芯片(Resolver-to-Digital Converter,简称RDC)或者特殊的软件解码算法将输出线圈上的模拟信号转换为电机转子实际的位置信息和速度信息,最后通过CPU芯片进行相应的处理。

图1 旋转变压器结构示意图
旋转变压器说到底是变压器的一种,其中原边励磁线圈和副边感应线圈均在定子上,在旋变转子跟随电机转子同轴转动的同时,旋变定子侧的感应信号不仅和原边线圈上的激励信号有关,还和电子转子的角度有关。通常情况下,在旋变原边线圈上通过施加满足变压器激励要求的正弦信号,由于电磁感应的原理,旋变副边线圈上输出和激励信号以及电机位置相关的信号,其一般表达式为:

上述表达式各项代表的含义如表1所示。

表1 旋变一般表达式参数含义
以1对极旋转变压器为例,其激励信号和次级感应信号波形的一般示意图如图2所示。
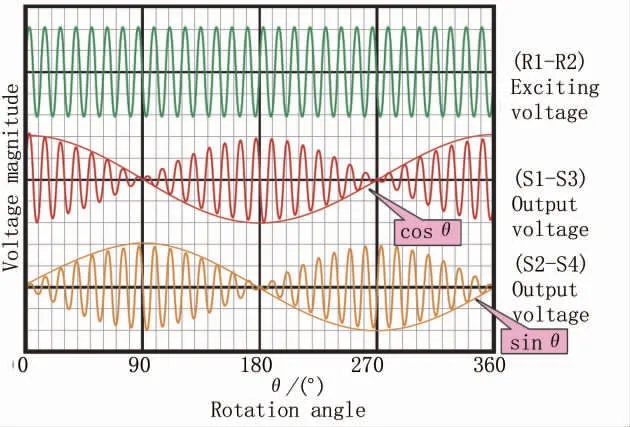
图2 旋转变压器波形示意图
3 旋变激励信号电路设计
不同旋转变压器要求的励磁信号略有不同,本方案以日本多摩川公司TAMAGAWA生产的3对极TS2223N1113E102旋变为例,该旋变参数如表2所示,该旋变的输入励磁电压信号是有效值为7V的交流信号,变压器传输变比是0.286,输入阻抗为120Ω±20%,输出阻抗为440Ω。

表2 多摩川公司旋转变压器TS2223N1113E102参数
通过旋变的原理和其参数得知,该型号的旋变激励信号至少需要有效值为7V、频率为10kHz的正弦交流信号,而一般单片机的输出电平只有3.3V或者5V,不满足直接驱动旋变激励信号的要求,所以通常采用专用的旋变激励信号发生芯片,同时将激励信号进行功率放大。另外,旋转变压器次级线圈输出的信号是模拟信号,通常需要专门的旋变解码芯片才能将电机位置信号解析成真实的电机转速和角度信号。满足生产车规级专用RDC解码芯片的厂商都被国外半导体公司垄断,如日本多摩川公司TAMAGAWA生产的AU680X系列(如AU6802、AU6803和AU6805),还有美国ANALOG DEVICES公司生产的ADS12XX和AD2S12XX系列。
本方案的旋变解码芯片以AD2S1210为例,通过查询该芯片的Datasheet如图3可知,其输入信号是SINE、COSINE INPUT,即接受旋变副边线圈输出信号电压的典型值,其峰峰值为3.15V的正余弦信号,常用的电动汽车用车规级旋转变压器的变比系数是0.286,本方案也以该类型旋转变压器举例说明。所以根据变压器的变比原理可以计算,该类型的旋变励磁电压的峰峰值至少需要满足如下计算方式:

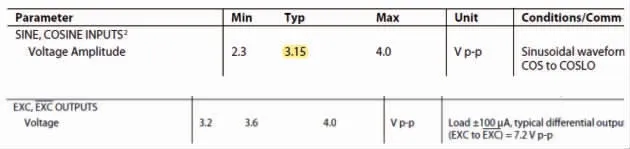
图3 AD2S1210 Datasheet
通过查询AD2S1210的Datasheet,其输出励磁信号典型值只有3.6×2=7.2,不满足旋变励磁电压的峰峰值,根据简单的数学计算11.01/7.2≌1.53可知。将RDC芯片输出的激励信号放大约1.53倍,即可满足驱动旋转变压器的要求。常用的放大电路方案如图4所示,该电路的放大系数通过选择合适的反馈电阻Rf和输入电阻Ri即可满足不同需求。以本方案举例,可以分别选取Rf的阻值为15.3kΩ,Ri的阻值为10kΩ即可满足放大倍数的要求,但是电路其余部分均是采用分立元件如二极管、三极管等被动器件搭建,相对于数字电路来说,模拟电路调试起来相对难度较大。

图4 旋变激励信号电路示例
本方案通过改进设计思路,使用美国TI公司生产的集成芯片,旋转变压器驱动信号功率放大专用器件ALM2402FQ1替代分立方案,其内部原理框图如图5所示,该芯片内部集成了MOS管的推挽放大电路,通过内部原理框图可知,该器件将二极管、三极管以及电路接口保护等分立器件,全部采用集成电路的技术封装在器件内部,简化了电路设计难度和调试难度,非常适合用于旋变激励信号的调制。
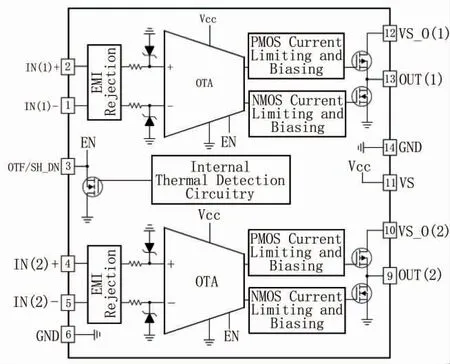
图5 ALM2402F-Q1内部原理框图
按照旋变对励磁信号的要求,根据上述数学计算结果,将励磁电压信号放大约1.53倍即可,所以参照ALM2402FQ1的应用电路如图6所示,仅需要通过简单配置放大电路外围电阻Rf和Ri的两个电阻阻值,即可实现对激励信号的放大倍数调整的需求,具体倍数可依据实际情况进行调整。

图6 ALM2402F-Q1应用参考电路
4 旋变反馈信号调理电路设计
由于电磁感应,旋变在励磁信号的作用下,其副边线圈输出的信号S1、S3和S2、S4,由于电机内部强磁场存在的原因,可能携带大量杂波干扰信号,为了准确解析出电机的位置和速度信息,该输出信号通常需要进行信号调制,才能满足RDC芯片解码的要求,或者可以直接输入Aurix单片机满足软件算法进行解码。常用的旋变输出信号调制基础电路结构如图7所示。增加该电路虽然在成本上稍微有所增加,但是起到电路阻抗匹配、消除系统杂波信号的目的,整体来说对整个系统设计是有利的。
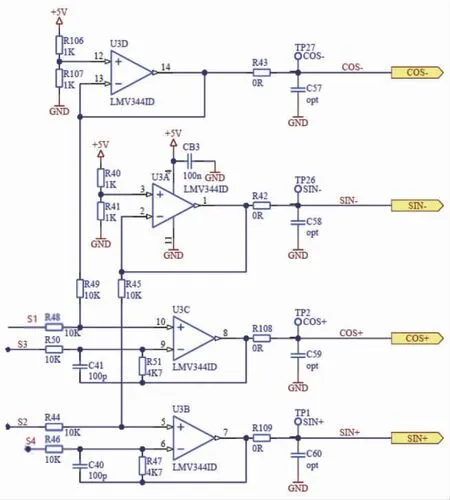
图7 旋变次级线圈信号调制电路
5 解码方案
5.1 专用集成电路硬件解码方案
通过上述介绍,采用专用集成芯片解码系统硬件架构如图8所示,主要包括旋变解码芯片RDC、信号放大电路、旋转变压器、信号调制电路和主控芯片CPU。
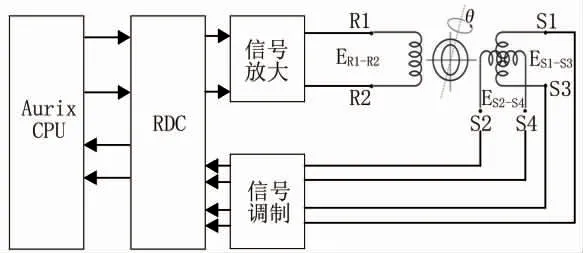
图8 专用集成芯片解码系统硬件架构
5.2 Aurix单片机软件解码方案
通过上述介绍,采用Aurix单片机解码系统硬件架构如图9所示,主要包括信号放大电路、旋转变压器、信号调制电路和主控芯片CPU。
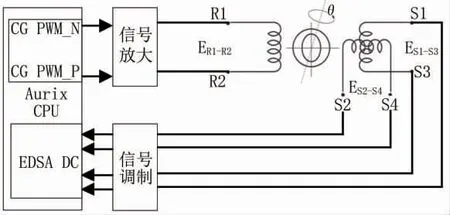
图9 Aurix单片机解码系统硬件架构
本方案软件解码芯片采用以Infineon公司Aurix系列的TC275为例,其芯片内部的EDSADC模块可以实现对旋变输出信号的解码功能。其基础原理如图10所示,其中Carrier Generator模块通过软件配置,可以实现产生不同频率的正弦信号或者方波信号,可用来产生旋变激励信号,通过外部电路Power Stage实现功率放大,从而正常驱动旋转变压器,旋变次级线圈感应出的两组信号,通过简单的信号调制电路后,进入TC275芯片EDSADC模块,EDSADC模块可实现对旋变次级线圈信号进行高速采样,通过内置调制、滤波、积分等功能小模块,最后输出电机转子的转速和角度信号。
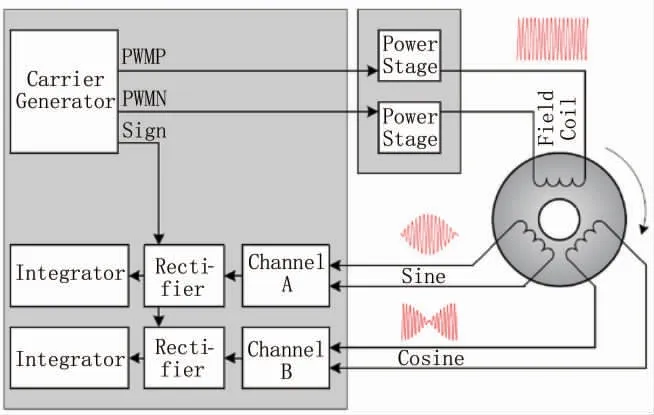
图10 EDSADC模块软解码示意图
6 结语
通过上述两种电机位置解码方案的对比,可以发现:①通过专用解码芯片进行解码,其优点是软件编程简单,只需要通过专用解码芯片的串行总线或者并行总线的方式读取解码芯片的寄存器,就可以准确读取电机的位置信息,解码算法由解码芯片自行完成,并且精度较高,同时硬件诊断功能较为全面;其缺点是由于增加了被动元件,电路影响参数较多,调试复杂度增大,并且造成硬件成本上升,给后期批量生产及原材料采购都增大压力。②通过使用英飞凌公司的Aurix系列芯片,其芯片内部由于集成了EDSADC专用模块,可以赋予该模块复杂的软件算法进行软解码,其突出优点是不仅能够使硬件成本大幅下降,同时简化了方案设计,而且由于软件解码更加灵活,可以在不更改硬件的情况下,根据系统需求实时进行软件算法的优化,设计变更更加快捷高效;其缺点是由于电机位置信息需要软件算法进行解析,其软件开发较为复杂,同时抗干扰和测量精度不易控制,并且诊断功能较少。
综上所述,可见两种解码方案各有优缺点,很难确定哪一种方案较优,读者可以根据具体需求,综合考虑成本和性能的基础上合理选择其中之一。
