支持向量机在舶航程智能终端节能降耗中的应用
2022-04-29周胜


摘要三维传感器有激活阈值参数达到该参数时可触发采集加速度数据;船舶的运行状态与三维加速度有密切联系;支持向量机是一种监督分类方法学习三维加速度对应的船舶状态再通过支持向量机学习参数识别船舶的运动状态以及修正三维传感器激活阈值可以达到记录运动轨迹的目的减少不必要的、北斗定位实现系统的节能降耗及航程记录。
关键词三维加速度;支持向量机;震动识别;动量;随机梯度
中图法分类号:TP181文献标识码:A
Application of support vector machine in energy saving and consumptionreduction of ship voyage intelligent terminal
ZHOU Sheng
(Shanghai Universal Navigation Technology Co.,Ltd.,Shanghai 201702,China)
Abstract : The three-dimensional sensor has an activation threshold parameter. When this parameter isreached,it can trigger the acquisition of acceleration data,the operating state of the ship is closelyrelated to the three-dimensional acceleration,the support vector machine is a supervised classificationmethod.The vector machine learns the parameters,identifies the motion state of the ship andcorrects the activation threshold of the three-dimensional sensor,which can achieve the purpose ofrecording the motion trajectory,reduce unnecessary GPS and Beidou positioning,and realize theenergy saving and voyage recording of the system.
Key words: three-dimensional acceleration,support vector machine,vibration identification,momentum,random gradient
1 引言
相关部门对渔船进行柴油补贴的重要依据是航行里程。通常而言,在渔船上安装船舶航程智能终端,可以记录渔船位置,并在 GPRS 网络覆盖范围内实时地传输相关信息。舶航程智能终端强制要求能可靠运行3 年以上,其一般都是内部供电,目的是不影响船舶的现有供电线路以及便于安装。因此,设备的稳定、节能以及准确记录航行里程非常重要。
舶航程智能终端在记录航行里程时,传统做法都是固定时间间隔,以记录船舶经纬度位置,在定位过程中需要通过北斗及 GPS 双模定位,会消耗大量的能量,如不对能耗进行优化,设备很难满足使用期限这一重要指标。为了节能降耗,往往把定时间隔加大,造成位置轨迹连续性差,不利于航程统计,进而影响柴油补贴发放。
本文通过研究船舶运行震动与三维加速度的关系,通过支持向量机识别船舶的运动状态以及修正三维传感器激活阈值,做到既能节能降耗又能实现精细的轨迹记录。
2 支持向量机的基本原理
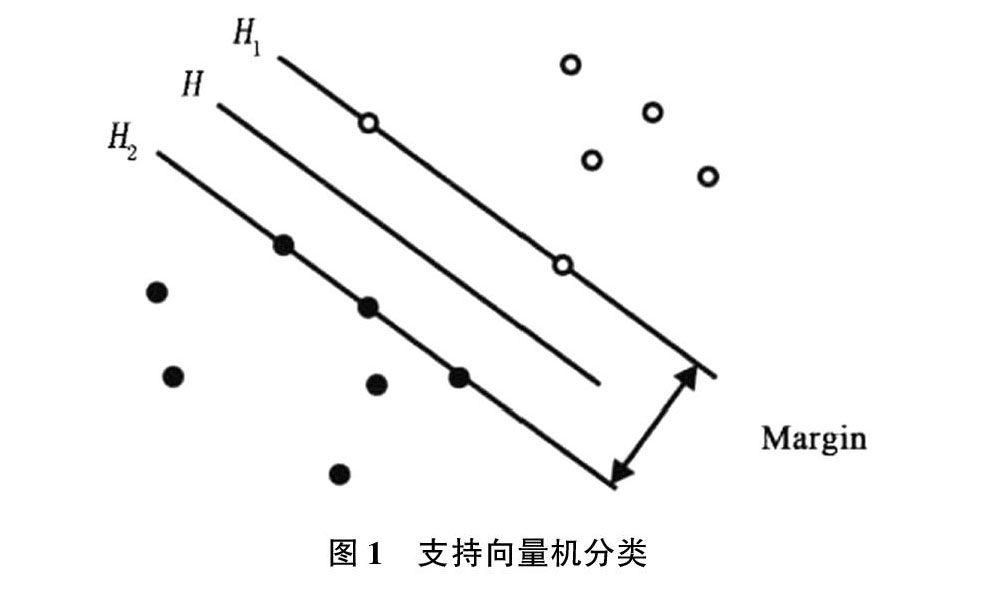
图1 中,实心点和空心点分别代表两类数据样本;H 代表分类超平面;H1 和 H2 分别代表数据样本中离 H 最近且平行于 H 的面,H1 和 H2 之间的距离称为分类间隔(Margin)。H 面不但能将 H1和 H2 两侧的样本分开,而且 H1 和 H2 之间的分类距离最大,在确保结构风险最小化的情况下,真正降低了风险。H1和 H2 之间的数据样本点,就叫做支持向量[1 ~2]。
待分类的数据为( xi ,yi ),i=1 ,2,…,N。其中,xi ∈Rn ,yi∈ {-1,1} ,n 維空间中分类决策函数为:
分类超平面方程为:
其中,w 为权重向量;b 为偏置向量。此时,两类样本到超平面的距离为。为了使间隔距离最大,则需要使 w 最小,使得最优分类超平面问题可以转化为解满足上述条件的一个凸二次优化问题:
该约束条件可引入拉格朗日(Lagrange)函数:
其中,ai 为 Lagrange 乘子。
则可得出对偶问题:
进而,可得到最优分类函数:
不过,在实际应用中,遇到的大多数是非线性可分问题,因此支持向量机的主要思路就是通过非线性变换将样本数据映射到高维的特征向量空间( Hilbert 空间)中,在高维特征向量空间中求得最优分类超平面,再用变换后的内积运算重复上述过程。依据统计学习理论,假设 K(x,y)为内积函数,即核函数,用核函数代替决策函数,即:
计算求解数值方法,可以使用序列最小优化算法(SMO)[3~ 4]求解上述问题。
3 设备安装及样本采集
3.1 安装及样本采集
如图2 所示,船舶航程智能终端通常安装在桅杆、扶手等,有利于北斗、GPS 及4G 信号定位传输,也有利于设备固定。安装设备时使用抱箍锁紧,使得船舶的开机震动信号传递到三维加速度传感器上。
由于船舶的大小、功率及外部环境(风浪)不同,采集到加速度信号也不同。因此,在样本收集阶段,针对不同大小类型的渔船在其不同的部位安装设备,进行信号采样,并对样本信号标注进行 SVM 监督学习。
3.2 三维加速度计算
舶航程智能终端集成三维加速度传感器,具有采样数据高速、灵敏的特征。可采集水平方向( X ,Y 方向)、垂直方向 ( Z 方向)上的运动加速度,如图 3所示。
根据几何关系,可知三维加速度的计算公式如下:
AccX表示水平 X 方向上的加速度,在硬件设备中其基准值为0;AccY表示水平 X 方向上的加速度,在硬件设备中其基准值为0;AccZ表示垂直 Z 方向上的加速度,在硬件设备中其基准值为-1024。
在图4、图5 中分别描绘了开机、关机状态下的三维加速度,可以明显看出在开机状态下设备的震动幅度比较强烈。关机状态下受到外部环境(如风浪)的影响会有少量的幅度变化。
4 识别及修正算法
三维加速度传感器有震动阈值参数,必须达到该阈值才可以输出数据。在各种状态、环境下,该参数有较大的变化。简而言之,不同场景下该阈值不同,需要动态智能调整其参数(图 6)。本文提出利用带有动量的随机梯度下降(SGD)[5]方法来自适应计算震动阈值:
其中,G 表示震动阈值;DG 表示阈值动量;α表示动量系数;rate 表示学习率;G 表示震动阈值更新梯度。
根据震动算法进行计算,可知当前是震动状态。说明当前唤醒中断阈值还有减少的空间,减少该阈值的参数,提交给传感器;根据震动算法进行计算,可知当前是静止状态。说明当前唤醒中断阈值不是最合理的,故加大该阈值的参数,提交给传感器。计算流程如下:
步驟1:系统主循环开始,进入休眠;
步骤2:休眠结束后,开始准备接收传感器数据,如传感器未被激活,重新回到主循环步骤1;
步骤3:传感器被激活,采集奇数 N 组加速度数据:
步骤4:通过 SVM 支持向量机,识别每一组〈AccXi,AccYi,AccZi〉的开关机状态 Ri;
步骤5:统计出N 组数据的整体运动状态,以过滤掉系统产生的噪声;R 为1 表示当前处于开机状态,R 为?1表示当前处于关机状态;
步骤6:处于开机状态时,进入步骤7;处于关机状态时,进入步骤10;
步骤7:计算阈值更新梯度,减少震动阈值,进入步骤8;
步骤8:开始 GPS、北斗定位,进入步骤9;
步骤9:记录北斗位置,标注该位置未上报,进入步骤1;
步骤10:计算阈值更新梯度,增加震动阈值,进入步骤1 。
5 实验分析
某功率渔船在左舷后部、左舷前部及烟筒等7 个部位安装船舶航程智能终端,在开机和关机状态下,按照步骤1 ~10的算法流程进行数据上报对比,统计出应报位置数量、实报位置数量以及错误率,具体数据如表1 及表2 所列。根据实验数据,可以看出该算法在这7 个安装部位都具有较高的识别率。
6 结束语
本文提出了一种基于支持向量机及阈值带动量自适应调节的算法,通过支持向量机来识别船舶的开机状态;通过阈值带动量自适应调节来适应不同的船舶类型、不同的外部环境下的加速度阈值参数。实现了开机状态的识别、阈值的动态适应,进而实现了设备在节能降耗的目标下轨迹位置的连续输出。通过实例验证发现,本文所提方法预测效果良好,预测误差均在工程范围内,符合实际需要。
参考文献:
[1] 李航.统计学习方法[M].北京:清华大学出版社,2012.
[2] 林香亮,袁瑞,孙玉秋等.支持向量机的基本理论和研究进展[J].长江大学学报(自科版),2018,15(17):48?53+6.
[3] 周晓剑,马义中,朱嘉钢.SMO 算法的简化及其在非正定核条件下的应用 [ J].计算机研究与发展,2010,47( 11):1962?1969.
[4] 杨杰,叶晨洲,全勇,等.支撑向量机回归的简化 SMO 算法[J].红外与激光工程,2004(5):533~ 537.
[5] 黄智濒,戴志涛.卷积神经网络与机器视觉[ M].北京:机械工业出版社,2019.
作者简介:
周胜(1977—) ,系统集成项目管理工程师,信息系统项目管理师,研究方向:北斗船载终端应用、北斗定位与导航应用、智能航程管理应用、位置信息与数据分析。
