危化品公路运输过程中的违规和高危驾驶行为分析
2022-04-29彭泽余
张 晨,李 嘉,李 飞,彭泽余,马 玲
(1. 中石化上海赛科石油化工有限责任公司,上海 201507 2. 华东理工大学商学院,上海 200237)
0 前言
违规驾驶行为的发生与很多前置高危驾驶行为如分神驾驶、疲劳驾驶、对抗驾驶等有关[1]。这些高危驾驶行为本身不是交警和企业安全管理部门可以直接监管的违规驾驶,却是违规驾驶的前置因素[2-4]。学者们大多只研究过2种危险驾驶行为之间的相互关系(如疲劳和分神之间的关系[2],或者疲劳和超速之间的关系[3]),很少有系统性地研究所有4类危险驾驶行为(分神驾驶、疲劳驾驶、对抗驾驶、违规驾驶)之间的相互影响关系。过去受限于数据获取的困难,监控和识别司机的违规和高危驾驶行为非常困难,也使得这类研究较为匮乏。仅有的一些研究所用数据的观测时间较短,很多都是在实验环境或模拟器环境中获取的数据[4,5],基于大规模长时间实际驾驶数据的研究还较少。最新的驾驶舱监控设备,可以通过表情识别、姿态识别和动作识别等技术,自动识别不同类型的违规和高危驾驶行为,为开展本研究提供了新的数据渠道。因此,本文基于某大型石化企业危化品运输车队2年的智能监控数据,利用面板向量自回归模型,研究不同类型危险驾驶行为之间的相互影响关系。
1 理论背景与研究假设
根据安全监管部门的要求,区分违规驾驶行为和危险驾驶行为。其中违规驾驶行为,是指对危化品运输安全造成直接危害的行为,包括超速、急加速、急减速、碰撞预警等。这些行为一般被甲方单位的HSE管理部门所直接禁止,也容易被交警的外部观测设备所检测,是甲方单位考核驾驶员安全绩效的关键核心指标。
高危驾驶行为是指对危化品运输安全造成间接危害的行为,又可以分为分神驾驶、疲劳驾驶和对抗驾驶3类。这些行为一般难以被交警的外部观测设备所检测,因而没有被甲方单位的HSE管理部门所直接考核,但是对违规驾驶行为和运输安全会造成较大影响,属于需要重点关注的高风险行为。
a) 分神驾驶。分神驾驶是指驾驶员在驾驶车辆时,精力没有集中在与驾驶有关的任务上,典型的表现包括左顾右盼、玩手机、打电话、抽烟等。分神驾驶会导致驾驶员无法注意到路面上突然出现的情况,导致出现交通事故。近期的研究表明有30%以上的交通事故是由开车时打手机引发的,开车打电话导致事故的风险比通常情况下高出4倍,开车玩手机时的反应比酒驾、毒驾要慢得多[6]。因此,分神驾驶是一种影响违规驾驶行为发生的高危行为,有下面的研究假设:
H1:分神驾驶行为对违规驾驶行为有正向影响。
b) 疲劳驾驶。疲劳驾驶是指驾驶员在长时间连续行车后,产生生理和心理机能的失调,而在客观上出现驾驶技能下降的现象,具体的表现包括打哈欠、瞌睡等。驾驶疲劳会影响到驾驶人的注意、感觉、知觉、思维、判断、意志、决定和运动等诸方面。疲劳后继续驾驶车辆,会感到困倦瞌睡,四肢无力,注意力不集中,判断能力下降,甚至出现精神恍惚或瞬间记忆消失,出现动作迟误或过早,操作停顿或修正时间不当等不安全因素,极易发生道路交通事故。因此,疲劳驾驶是一种影响违规驾驶行为发生的高危行为,有下面的研究假设:
H2:疲劳驾驶行为对违规驾驶行为有正向影响。
c) 对抗驾驶。对抗驾驶是指驾驶员对智能监控系统的有意规避,使得智能监控系统失去正常监管能力,具体的表现包括遮挡监控摄像头、更换驾驶员等。对抗驾驶行为可能会助长违规驾驶行为的发生,因为驾驶员认为摆脱系统监管后,就可以肆意违规而不被发现,或者系统即使发现违规也不能与本人身份进行联系。当驾驶员认为公司无法对自己的违规驾驶行为进行考核时,驾驶就会更加随意,违规驾驶行为就可能会增加。因此,对抗驾驶是一种影响违规驾驶行为发生的高危行为,有下面的研究假设:
H3:对抗驾驶行为对违规驾驶行为有正向影响。
驾驶是一个动态过程,各种行为之间交错发生,互为因果(如图1所示)。例如,对抗驾驶可能导致违规驾驶,但是违规驾驶也可能反过来导致对抗驾驶,因为当司机发现自己因为违规太多可能被公司惩罚时,就会采取措施来干扰智能监控系统。同时,各类驾驶行为之间存在因果链条,导致最终违规发生的原因不能简单的归因为驾驶员的单个行为。例如,疲劳驾驶可能导致分神驾驶,分神驾驶又可能导致最终的违规驾驶。这说明,本研究涉及的4个关键变量(违规驾驶行为、分神驾驶行为、疲劳驾驶行为和对抗驾驶行为)之间存在较强的内生性。

图1 概念框架
2 研究方法
2.1 研究场景
本研究场景在上海市一家大型的石化企业,其生产的危化品需要通过公路运输的方式销售到全国各地。2017年8月,车辆安装了智能安全驾驶辅助系统,可以通过人脸识别等技术,检测驾驶员是否注意力集中、是否发生疲劳驾驶等并发出警告提示,也可以记录驾驶员的安全驾驶绩效。智能安全驾驶辅助系统可以实时将驾驶员的违规行为数据传输到监管平台,便于事后进行驾驶员行为的集中分析。本研究的观察期为2年(2017年8月—2019年8月),针对驾驶员的每次出车任务,以小时为单位构造面板数据。数据集一共包含了371名驾驶员在2年内被系统捕捉的100多万条危险驾驶行为记录。
2.2 测量方法
4类危险驾驶行为的数据均来自智能安全驾驶辅助系统的记录。系统能够测量很多细粒度的不良驾驶行为。测量项和驾驶行为之间的对应关系如表1所示。

表1 驾驶行为的测量具体项
2.3 实证模型
本研究的变量之间存在较为严重的联立性,选用面板向量自回归模型(Panel Vector Autoregression,PVAR)来研究违规驾驶行为和3种高危驾驶行为(分神驾驶、疲劳驾驶和对抗驾驶)之间的因果关系。PVAR模型不仅能够处理所有变量都是内生的情况,还允许使用面板数据来控制个体差异[7]。本文所用的PVAR模型如公式(1)所示:
(1)
式中:Vt——在t时刻的违规驾驶行为;
Dt——在t时刻的分神驾驶行为;
Ft——在t时刻的疲劳驾驶行为;
Ct——对抗驾驶行为;
J——模型的阶数,代表滞后期。
在PVAR模型中,系数代表每个变量(违规驾驶行为、分神驾驶行为、疲劳驾驶行为和对抗驾驶行为)滞后值和等式左侧变量之间的关系。例如,当要考察对违规驾驶行为的影响时,分神驾驶行为的一阶滞后项系数代表当前时刻如果分神驾驶行为增长1%,下一小时违规驾驶性将如何增长。
通过贝叶斯信息准则(Bayesian Information Criterion, BIC),赤池信息量准则(Akaike’s Information Criterion, AIC)和准信息准则(Quasi Information Criterion, QIC)来确定合适的滞后期J[8]。具有最小BIC, AIC和QIC的模型是最好的。如表2所示,最佳滞后期是1 h。

表2 最佳滞后期的选择
3 计算过程和结果讨论
3.1 稳定性检验和格兰因果检验
为了进行格兰因果检验和PVAR分析,变量必须是平稳的。因此,首先检验数据的平稳性。对于非平衡面板,使用了Fisher-ADF测试[9]。表3中的测试结果表明,所有的变量都是平稳的,不存在伪回归的问题。

表3 Fisher单位根检验
接下来进行协整检验,以检测4种变量之间存在的均衡关系。本研究使用了KAO协整检验(结果见表4),整体的4种变量都通过了协整检验,可以认为模型中的4种变量的长期的均衡关系是实际存在的。

表4 KAO协整检验
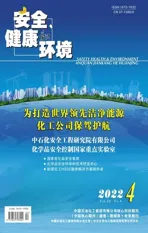
接下来,进行了格兰因果检验,结果见表5。表5的结果表明,疲劳驾驶和分神驾驶之间存在显著的双向因果关系,而分神驾驶对违规驾驶、对抗驾驶对分神驾驶、违规驾驶对疲劳驾驶、以及疲劳驾驶对对抗驾驶都存在单向的因果关系。格兰因果检验的结果表明,本文研究的变量组成一个动态系统,而PVAR正是研究这种系统的合适方法[10,11]。
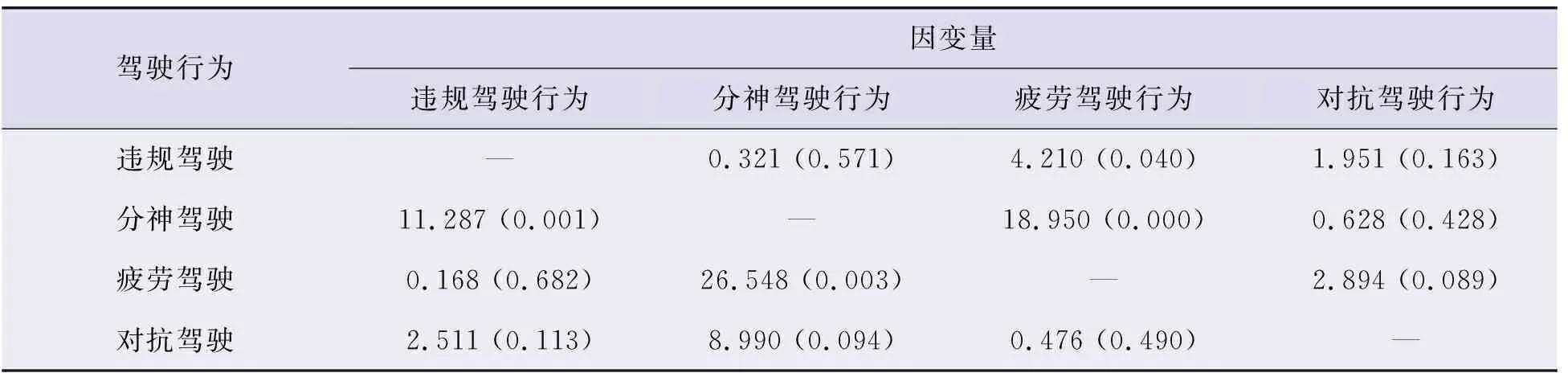
表5 格兰因果检验
3.2 主要结果
PVAR分析的结果如表6所示。表6的结果表明,所有的4项危险驾驶行为即违规驾驶(β=0.574,p<0.001)、分神驾驶(β=0.392,p<0.001)、疲劳驾驶(β=0.224,p<0.001)和对抗驾驶(β=0.494,p<0.001),都有显著的自回归特征。即所有的危险驾驶行为,都有自动延续到下一小时的倾向。
a) 违规驾驶。对违规驾驶有显著直接影响的其它变量,只有分神驾驶。表6的结果表明,分神驾驶对下一小时的违规驾驶有显著的正向影响(β=0.017,p<0.001),因此,H1成立。令人吃惊的是,疲劳驾驶(β=0.005,p>0.05)和对抗驾驶(β=0.073,p>0.05)对下一小时的违规驾驶并没有直接影响,因此,H2和H3均不成立。
b) 分神驾驶。对分神驾驶有显著直接影响的其它变量,包含疲劳驾驶和对抗驾驶。表6的结果表明,疲劳驾驶对下一小时的违规驾驶有显著的正向影响(β=0.119,p<0.001)。这说明疲劳驾驶是导致分神驾驶的唯一直接原因。结合上面的结论,可以知道疲劳驾驶并不会对违规驾驶造成直接影响。相反,疲劳驾驶通过影响分神驾驶,来最终造成违规驾驶。
表6的结果还表明,对抗驾驶对下一小时的违规驾驶有显著的负向影响(β=-0.033,p<0.01)。这是因为对抗驾驶需要驾驶员绞尽脑汁来规避摄像头的监管,可以让驾驶员保持亢奋状态。因此,对抗驾驶行为并不是一无是处,因为它可以抑制分神驾驶行为。
c) 疲劳驾驶。对疲劳驾驶有显著直接影响的其它变量,只有分神驾驶。表6的结果表明,分神驾驶对下一小时的疲劳驾驶有显著的正向影响(β=0.011,p<0.001)。这说明分神驾驶是预测疲劳驾驶的有效指标。
表6 PVAR模型回归结果
d) 对抗驾驶。除了自身的前一期变量,没有其它任何变量显著影响对抗驾驶。这说明对抗驾驶的来源,与其它违规行为显著不同。尤其是出现违规驾驶行为后,并不会显著增加对抗驾驶行为(β=0.001,p>0.05)。这说明驾驶员在感觉到自己有大量违规驾驶行为后,并不会通过对抗驾驶行为来避免惩罚。相反,对抗驾驶行为应该有其它更重要的根源(如驾驶员具有对抗性的性格特征)。
4 结论
a) 造成违规驾驶的主要逻辑链是“疲劳驾驶->分神驾驶->违规驾驶”,即疲劳驾驶导致分神驾驶,而分神驾驶进而导致违规驾驶。分神驾驶是违规驾驶的直接原因,而疲劳驾驶是违规驾驶的间接原因。
b) 疲劳和分神是相互影响的两类行为,两者之间存在显著的双向因果关系。因此,疲劳和分神之间可以相互预测,这为危险品长途货运司机的早期预警,提供了重要依据。
c) 对抗驾驶和分神驾驶这2种危害路径具有一定的互斥性。虽然对抗驾驶本身并不提倡,但它能够带来抑制分神的额外好处。
本研究能够帮助更加精准地预测每一类危险驾驶行为的发生。例如,根据司机的分神行为来预测违规行为,会比传统依靠疲劳驾驶来预测要更加准确。同时,高危驾驶行为至少提前1 h预测了违规驾驶行为的发生。这不仅为提示危险驾驶行为提供了足够长的预警期,也为辅助系统的干涉和矫正提供了足够的操作、观察和策略更换时间。