先进技术微波探测仪(ATMS)云液态水路径算法评估*
2022-04-29董嫦娇翁富忠
董嫦娇 翁富忠
1.南京信息工程大学,南京,210044
2.中国气象局地球系统数值预报中心,北京,100081
3.中国气象科学研究院灾害天气国家重点实验室,北京,100081
1 引言
大气中云液态水和水汽的时空分布与演变及其温室效应对全球天气和气候变化有重要影响(Stephens,2005;Yang,et al,2018a,2018b)。液态云水含量定义为每单位体积空气中的水(单位:g/m3)或单位质量空气中的水含量(单位:g/kg)。大气云液态水含量变化范围较大,取决于给定位置云的类型。大气中不同高度层可能存在不同类型的云,有些云云滴密度较低(如卷云),而有些密度较高,同时含水量也高(如积雨云)。云微物理参数的不确定性导致液态水反演算法较为复杂(Weng,2014)。
无线电探空仪探测的湿度廓线资料可用于计算整层大气柱总可降水量。但是全球固定探空站通常每天只进行两次探测,使得测量的大气水汽时、空演变受到很大限制(Gui,et al,2017)。因此,遥感反演成为获得总可降水量和云液态水路径的必要手段。姚展予等(2009)指出:地面和卫星云参数遥感算法较多,但是地面观测手段在海洋上空很难实现;相比之下卫星观测可以提供全球范围的探测信息。通过卫星遥感数据反演获得的全球范围云液态水含量分布,不仅能够用于全球云水资源的评估,还能用作数值预报卫星同化系统中云检测和质量控制(Weng,2014)。
与可见光以及红外波段仪器相比,被动微波遥感仪器直接接收来自云液态水的热辐射,因此观测资料能获得海洋上空的大气总可降水量和云液态水路径。对微波圆锥扫描探测仪器,1983 年,Prabhakara 等使用Nimbus 7 扫描多通道微波辐射计(Scanning multichannel microwave radiometer-SMMR)数据在6.6 和10.7 GHz 通道处反演了云液态水含量。国防卫星计划(Defense Meteorological Satellite Program-DMSP)项目卫星搭载微波/成像仪(SSM/I)之后,基于该无源微波传感器的卫星观测数据反演算法逐渐成熟,不少学者利用该仪器的探测数据及对应算法反演出大气总可降水量和云液态水路径在全球海洋上的分布(Alishouse,et al,1990;Hargens,et al,1992;Greenwald,et al,1993;Liu,et al,1999;Weng,et al,1994;Ferraro,et al,1996)。这些算法主要采用22.235 GHz 和另一个通道频率的组合反演大气可降水量和云液态水路径。SSM/I有4 个频率(19.35、22.235、37 和85.5 GHz),Weng等(1994)在已有研究基础上,针对SSM/I 将3 种分别适用于不同大小的云液态水反演算法组合在一起,这种组合算法可以反演多种条件下的云液态水含量。Weng 等(1997)对Weng 等(1994)的组合算法的系数进行了再研究。Tang 等(2017)在Weng 等(1994)组合反演方法的基础上,利用风云三号卫星微波成像仪(Microwave Radiation Imager-MWRI)观测数据对云液态水进行了反演。姚展予等(2003)应用热带降雨测量卫星上搭载有微波成像仪的遥感资料对云中液态水进行反演。对于跨轨微波扫描仪,1976 年,Grody 曾利用安装在Nimbus 6上的跨轨扫描微波光谱仪(Scanning microwave spectrometer-SCAMS)数据推导了21 和31 GHz 频率处的亮温与云液态水的统计关系,进而反演出太平洋上的云液态水路径(Grody,et al,1980)。1998年7 月,NOAA15 上首次搭载了先进微波探测单元(Advanced microwave sounding unit-AMSU),它有15 个通道,频率范围23—89 GHz,该仪器与微波湿度计(MHS)组合可以探测温度和湿度廓线,Weng 等(2003)在早期对SSM/I 云液态水反演的研究基础上,针对AMSU 以辐射传输模型为基础开发了一种经验算法,随后结合海洋物理参数发展了一种新的物理反演算法。此外,陈洪滨(2002)提出一种云水反演的新思路:星-地微波衰减量估算云液态水路径。
目前对于AMSU 主要提出了经验反演(Grody,et al,2001)和物理反演(Weng,et al,2003)算法,均是基于两个低频窗区通道(23.8 和31.4 GHz)。而先进技术微波探测器(Advanced Technology Microwave Sounder-ATMS)继承了AMSU/MHS的相关通道并做了改进(共22 个通道),增加了扫描点,卫星观测的覆盖率及仪器分辨率均显著提升。因此,将AMSU/MHS 相关算法移植到ATMS可以得到更高质量的反演产品。尽管目前已经提出多种云液态水反演算法,但是很难明确哪种算法更加可靠。本研究旨在对不同的云液态水算法进行对比,由于不同仪器自身差异也会导致反演结果的不同(如微波成像仪和微波辐射计在波长、扫描角等参数上的差异等),文中只针对ATMS 一种仪器进行算法对比。
2 ATMS 观测数据集
先进技术微波探测仪(ATMS)搭载于2011 年发射的美国新一代极轨气象卫星JPSS(Joint Polar Satellite System)的准备星Suomi NPP(National Polar-orbiting Partnership)上,是微波温度计AMSU-A 和微波湿度计AMSU-B/MHS 的结合体,可以探测大气温度和湿度的垂直分布特征。ATMS共有22 个探测通道,在AMSU 的基础上增加了51.76 GHz、183.31±4.5 GHz 和183.31±1.8 GHz;同时,也用88.2 GHz 和165.5 GHz分别替换了AMSU 原有的89 GHz 和150 GHz 通道(Goldberg,et al,2006)。ATMS 前15个通道频率范围为23.8 GHz—57.3 GHz,是温度探测通道。频率为23.8 GHz 和31.4 GHz 的两个窗区低频通道可以用作降水识别、地表发射率校正,研究大气中液态水和水汽对温度探测的影响以及云液态水路径反演等(Weng,et al,2003)。除去前两个通道,从50.3 GHz到57.3 GHz 的13 个通道为氧气吸收通道,可以用来获得从地表到50 km 高度的大气温度廓线(Goldberg,et al,2006)。ATMS 的后7 个高频通道可以用于湿度探测,通道16 和17 分别对应AMSUB 的通道1 和通道2。其中通道16 与AMSU-B 通道1 具有相同的极化方式,但是探测频率不同。通道18、20 和22 分别与AMSU-B 的 通道5、4 和3 对应,除了通道18 的极化方式不同外,其余均相同。ATMS 的轨道宽度为2300 km,每条扫描线上有96 个扫描点,扫描步长为1.11°,扫描周期为8/3 s,在窗区通道1 和2 星下点分辨率为75 km,通道3—16 为32 km,通道17—22 为16 km(Weng,et al,2013)。ATMS 的扫描点数增多意味着卫星的观测覆盖率增大,董佩明等(2014)认为这将提供更多的观测信息。文中主要利用ATMS 前两个低频窗区通道的观测亮温对云液态水路径进行反演。
3 云液态水算法概述
卫星微波辐射计低频波段的波长相对于云粒子尺寸较长,其散射和吸收可用瑞利近似。由于散射项贡献较小可以忽略,吸收系数主要与粒子的体积有关,因而与液态水成线性关系。对于非降雨云,亮温几乎与整层的垂直云液态水线性相关,因此,对于云液态水的反演可以基于近似的辐射传输方程。在较低频率下,可以在辐射传输方程中忽略大气散射项(Weng,et al,2003)。
当忽略单次和多次散射项,可以将辐射传输方程以标量形式写为(Weng,2017)

式中,Is、Iu、Id分 别为地表经大气衰减后的辐射、整层大气上行辐射以及大气下行辐射经地表反射和大气衰减后到达大气层顶的能量。
式中,rs是表面双向反射率,τ是光学厚度,μ、μ'分别是入射、反射天顶角的余弦,B是温度为T时的普朗克函数。
在微波频率下,辐亮度与瑞利-金近似下的亮温有关,只考虑第一斯托克斯分量(即亮温),可以推出微波亮温与其他光学参数的物理表达式(Weng,et al,2001)
ε是表面发射率;Ts是表面温度;Tc是宇宙背景亮温;参数Ω是针对表面非镜面反射效应引入的,随表面粗糙度、海面风速、频率以及大气透过率而变化(Wentz,1997)。对于等温大气,上行和下行亮温可以近似为
式中,∆T=Ts−Tm,可以看出,在上述近似下的亮温与层的平均温度以及大气透过率直接相关。在低发射率条件下,亮温随大气透过率的降低而升高。这一物理原理促成了对海洋上空的云微波遥感(Weng,2017)。
基于上述理论,可以衍生出经验和物理两种云液态水的反演算法。
3.1 经验算法
Grody 等(2001)针对AMSU 开发的云液态水(L)和大气总可降水(V)反演算法,同推导SSM/I 算法的过程相似,但由于SSM/I 和AMSU 存在差异,因此具体算法也做了相应调整。SSM/I 和AMSU除了频率上的差异(SSM/I 通道的频率分别为19.35、22.23、37 和85 GHz,而AMSU 是23.5 和31.4 GHz)外,扫描方式也不同。SSM/I 是以固定的局地天顶角53.1°观测地球,而AMSU-A 则是在局地天顶角范围为1.2°—57.3°进行扫描。当AMSU 从最低点开始扫描时,不同天顶角对应的地表发射率不同,通过大气的路径长度也不同(即邻边效应),覆盖范围也随之增大。除了不同足迹大小的影响外,所有这些影响因子都包含在用于生成算法的辐射传输模型中。
在微波频率下,辐射强度与温度成线性关系,因此算法以亮温展开讨论。由于微波大气层顶观测的亮温包含地表热辐射、大气上行辐射以及下行辐射经地表反射和大气衰减后3 个分量。对于仅对地表或对流层最低层敏感的窗区通道,可以将非等温大气视为等温大气(Grody,et al,2001),由式(4)可以推导出,在频率ν处的亮度温度Tb近 似为

式中,ε和Ts分别为表面发射率和温度。
其中地表发射率取决于频率、极化方式、局地天顶角(θ)。大气透过率 Υ定义为

式中,τO、τV和 τL分别是氧气、水汽和液体的光学厚度,主要依赖于云液态水含量和总可降水量。Grody 等(2001)利用辐射传输模式对AMSU 进行模拟,并将其结果进行回归分析最终获得了云液态水和可降水经验反演算法

式中,θ是局地天顶角,Ts是海面温度,Tb23和Tb31分别表示通道23.8 GHz 和31.4 GHz 的观测亮温,为了确保海洋上空的海表面温度Ts大于Tb23和Tb31两个通道的观测亮温,因此将海面温度Ts设为285 K。对于系数a0、a1、a2、b0、b1和b2,是将具有代表性的无线电探空仪廓线(包括大气温度、水汽和云参数)作为输入,进入辐射传输模型生成模拟亮温,然后通过回归分析获得系数。具体为:a0=247.92−(69.235−44.177cosθ)cosθ,a1=−116.27,a2=73.409,b0=8.240−(2.622−1.846cosθ)cosθ,b1=0.754,b2=−2.265。
3.2 物理算法
物理算法的本质与经验算法相同,也是由辐射传输方程推导出来。式(6)中液体和水汽的光学厚度可以写为
m为复折射指数,Im 为取虚部函数,λ 和 ρw分别为波长和粒子密度,是水汽的质量吸收系数,单位为m2/kg;ρV是大气中水汽密度;假设与高度无关,可以推导出

式中,κL是 液相云的质量吸收系数,
同理,

式中,V和L分别表示为是垂直方向水汽和液态水的整合,因此大气透过率可以写为

已有学者利用低频窗区通道的测量值推导出了非降雨云的液态水含量(Greenwald,et al,1993;Weng,et al,1994,1997;Weng,2000;Wentz,1997),同时,为了消除大气气体成分吸收和发射对结果的影响,通常采用多个微波窗区通道对云液态水进行反演。至于如何选择合适的通道,由不同频率通道亮温对云液态水的敏感性决定(Weng,et al,1994)。如需要探测较低或者中等大小的云液态水,可采用通道频率在30—40 GHz 的亮温,此时测量范围可达1 mm(kg/m2)。另一个通道可以选择靠近22 GHz,用于校正水汽影响(Weng,et al,2000)。
由式(12)可以看出,需要求解的量L和V是透过率指数函数中的指数,因此联合式(5),将L和V写到等式左边可以得到(Weng,2017)
式中,µ为天顶角的余弦值,进一步对于AMSU 观测资料,利用其窗区通道的两个频率分别为23.8 GHz和31.4 GHz 的亮温,可以推导出云中液态水含量和总可降水量(Weng,et al,2003)。

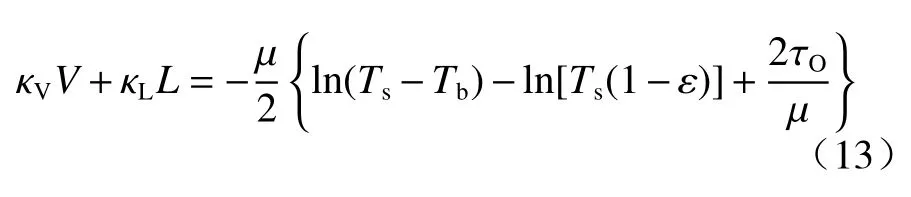
物理算法的结构和经验算法很像,它们最大的差别是系数的确定。不同于经验算法,物理算法的系数为:a0=−0.5κV23/(κV23κL31−κV31κL23),a1=κV31/κV23,a2=−2.0(τO31−a1τO23)/μ+(1.0−a1)ln(Ts)+ln(1.0−ε31)−a1ln(1.0−ε23),b0=0.5κL23/(κV23κL31−κV31κL23),b1=κL31/κL23,b2=−2.0(τO31−b1τO23)/μ+(1.0−b1)lnTs+ln(1.0−ε31)−b1ln(1.0−ε23);其中,ε和Ts分别为海面发射率和海面温度,κV和 κL分别是水汽和云液态水的质量吸收系数。在瑞利近似下,可以用云层温度Tl(℃)将 κL表示为κL=;氧气光学厚度可被参数化为海面温度的函数:τO=aO+bOTs。
表1 给出了适用于AMSU 多种通道的计算系数(Weng,et al,2003),在文中反演云液态水(L)和大气总可降水(V)的算法中,将其应用于ATMS 在23.8 GHz 和 31.4 GHz 两个频率的通道观测数据。
表1 在AMSU-A 四个通道用于总可降水和云液态水算法的计算参数Table 1 Parameters calculated at four AMSU-A channels and used in total precipitable water and cloud liquid water algorithms
4 不同算法云液态水反演结果对比
4.1 全球海洋上空云液态水反演结果
2018 年7 月8 日,台风玛利亚位于西北太平洋。选取当日ATMS 降轨观测数据,分别利用经验和物理算法反演出云液态水含量和大气总可降水量,得到其在全球范围洋面上的分布。上述两种算法加入了海冰去除模块,在高纬度海冰覆盖区域鲜有液态水分布,同时为了避免由纬度过高引起的不必要误差,文中统一截取南北纬60°以内的结果进行对比分析。选取同一天的ERA5 再分析数据,与ATMS 数据进行时间和空间匹配,获取对应的云液态水和总可降水结果,如图1、2 所示。
需要注意的是,在海洋上空用于生成再分析资料的云水信息几乎没有直接探测值,使用大量卫星仪器遥感产品进入同化系统,生成较为合理的云液态水产品,并不能作为观测真值。鉴于本研究需要对不同云液态水算法进行对比,故选其作为参考,以判断反演结果的范围、大小以及全球洋面上云液态水在纬度带上的分布趋势是否合理。
图1 和2 显示,由经验和物理两种算法反演出的云液态水和大气总可降水量,分别与再分析资料相比,全球洋面上的分布一致率均较高,但是3 种算法结果在不同区域的大小和范围存在一定差异。从图1 可以明显看出,在中纬度地区,由经验算法反演出的云液态水数值和范围普遍高于物理算法和再分析数据。产生这种现象的原因可能是,Grody 等(2001)的回归经验算法系数假定海面温度为285 K,而真实的海面温度热带地区高于285 K,中、高纬度地区低于285 K(参见图5)。从算法原理分析,物理算法在反演过程中采用真实的海表温度,减小了由海温引起的反演误差。同时从图1 可以看出,由物理算法反演出的云液态水和其他两种结果相比,热带地区晴空区更为明显。对于反演出的大气总可降水量,图2 显示,经验算法的反演结果在热带地区范围和大小都高于其他两种方法,物理算法反演出的大气总可降水量与再分析资料更为接近。
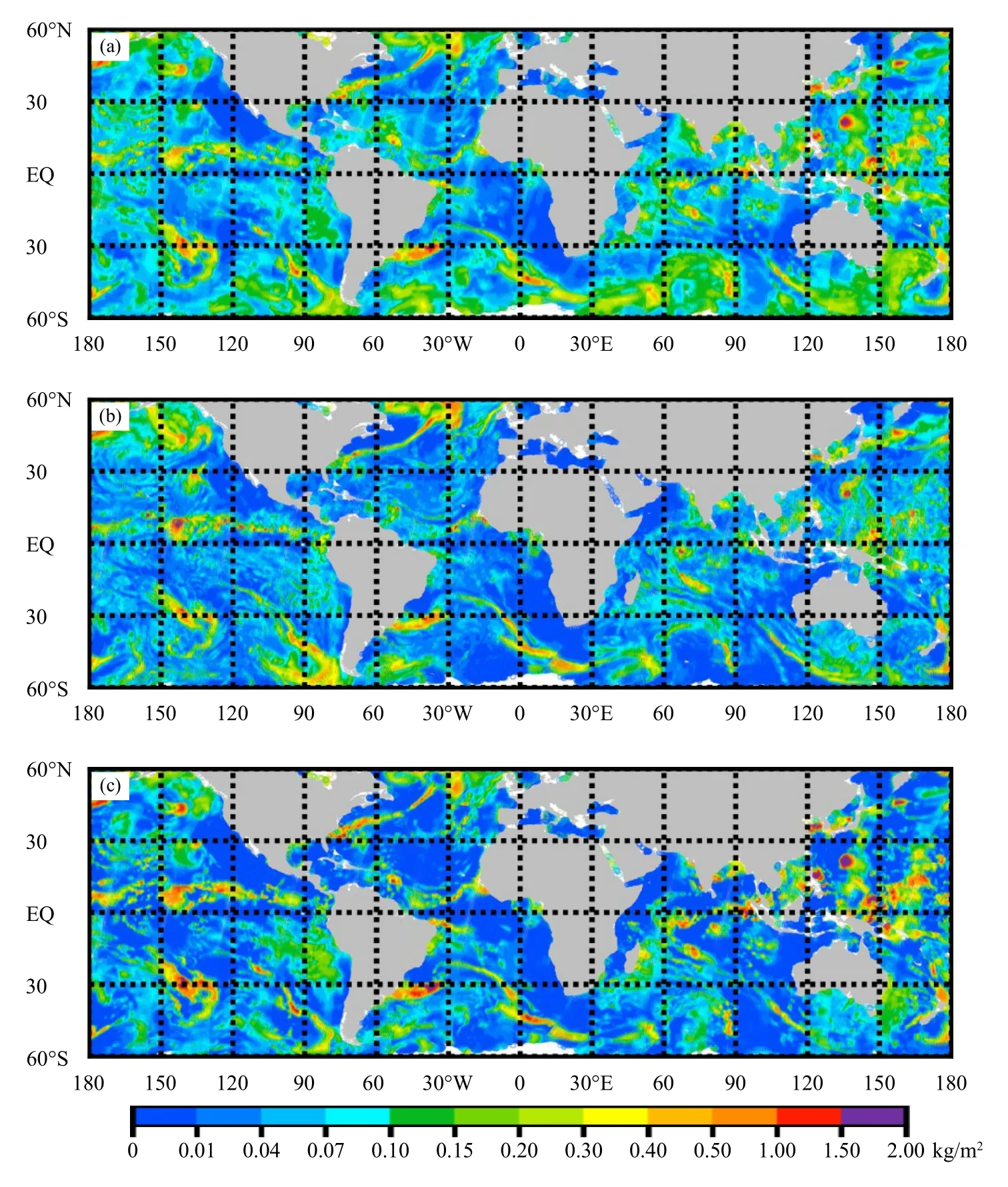
图1 2018 年7 月8 日ATMS 全球海面云液态水反演结果(a.ATMS 观测亮温经验算法,b.ERA5 再分析资料,c.ATMS 观测亮温物理算法)Fig.1 Cloud liquid water retrieved from ATMS over global oceans on 8 July 2018(a.ATMS brightness temperature using the empirical algorithm,b.ERA5 reanalysis data,c.ATMS brightness temperature using the physical algorithm)
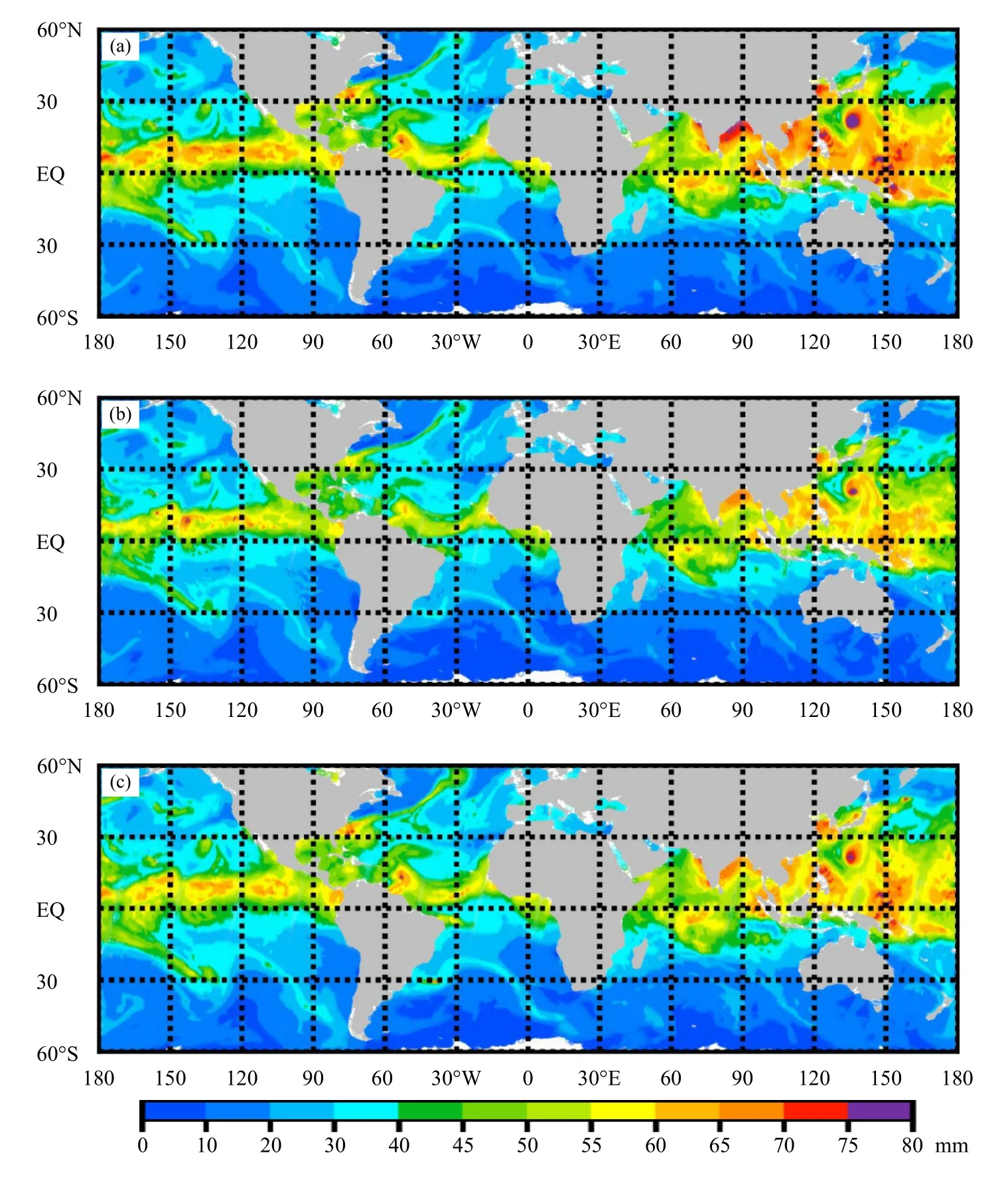
图2 2018 年7 月8 日ATMS 全球海面大气总可降水反演结果(a.ATMS 观测亮温经验算法,b.ERA5 再分析资料,c.ATMS 观测亮温物理算法)Fig.2 Atmospheric total precipitable water retrieved from ATMS over global oceans on 8 July 2018(a.the empirical algorithm,b.ERA5 reanalysis data,c.the physical algorithm)
图3 分别为物理和经验算法反演结果与再分析资料的差,由图3a 可以看出物理算法基本与ERA5 再分析资料接近,偏差为0—0.02 kg/m2,赤道附近的热带辐合带以及台风区偏差略大,这显示出模式与探测仪器之间的云水差异。图3b 显示,经验算法部分区域与ERA5 再分析资料接近,但是在30°—60°S 两者结果偏差较大,达到0.1 kg/m2。对比图3a 和b,物理算法与ERA5 再分析资料的总体偏差小于经验算法与ERA5 再分析资料的差。
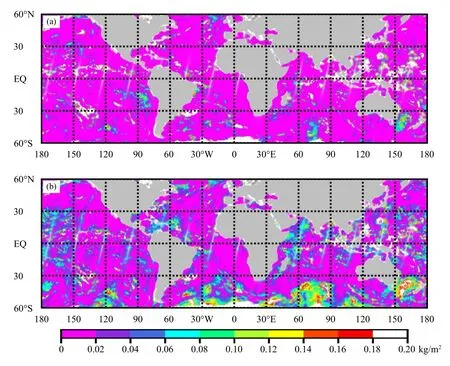
图3 2018 年7 月8 日全球海面云液态水路径差(a.物理算法与ERA5 再分析资料的差,b.经验算法与ERA5 再分析资料的差)Fig.3 Differences in cloud liquid water path between retrievals and ERA5 on 8 July 2018(a.differences between the physical retrievals and ERA5,b.differences between the empirical algorithm and ERA5)
图4 为物理和经验算法用到的两个低频通道(23.8 GHz 和31.4 GHz)观测亮温,可以看出两个通道的亮温在赤道以北10°左右呈现高值。结合式(7)和(14),从反演结果可以看出,两个通道的亮温观测值越高,云液态水路径和大气总可降水量就越大。当物理和经验算法通道亮温值一致时,如何获取系数直接影响它们的反演结果。
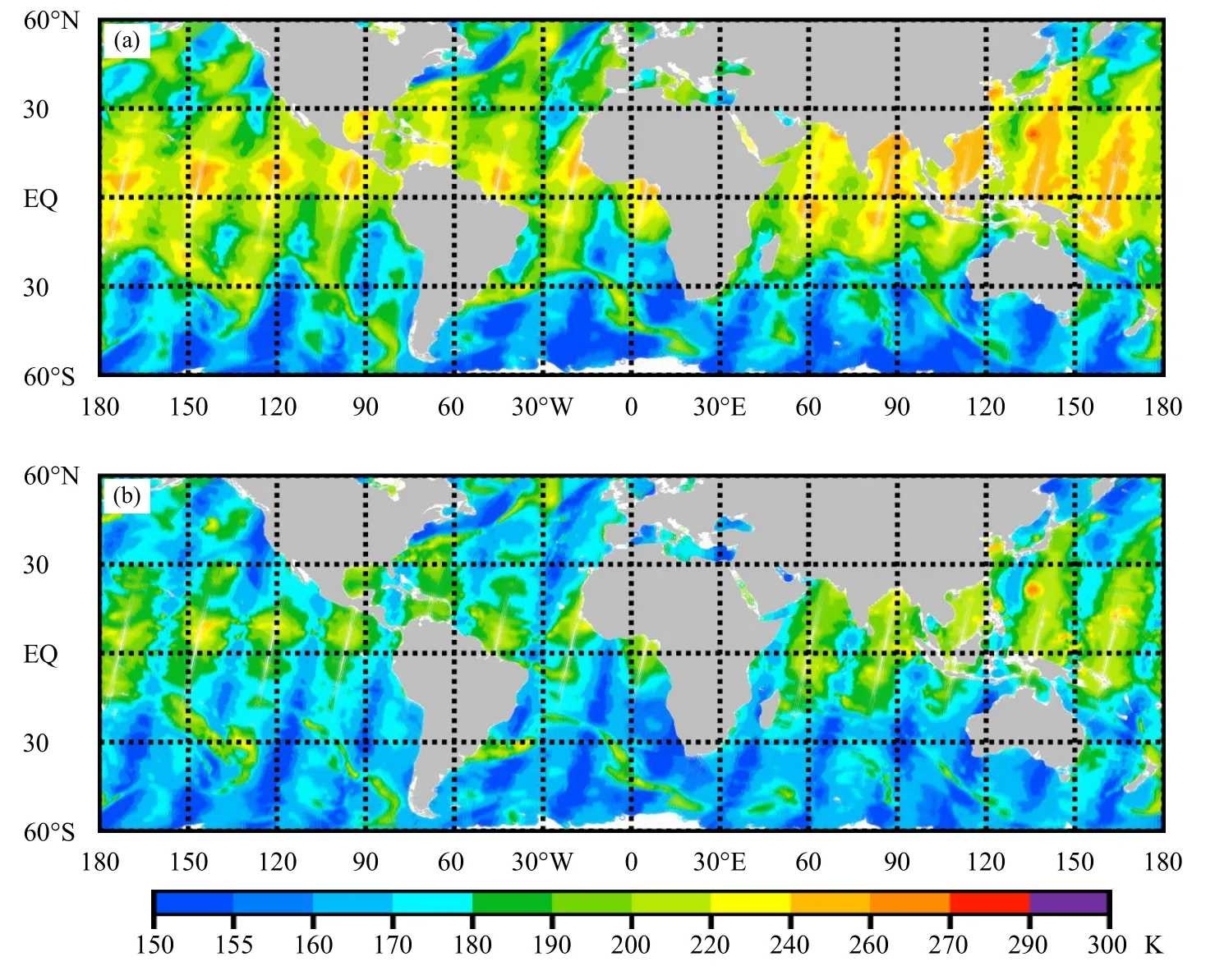
图4 2018 年7 月8 日全球海面ATMS 降轨观测亮温(a.通道1(23.8 GHz)观测亮温,b.通道2(31.4 GHz)观测亮温)Fig.4 ATMS brightness temperature from the descending orbit on 8 July 2018(a.the observed brightness temperature of channel 1(23.8 GHz),b.the observed brightness temperature of channel 2(31.4 GHz))
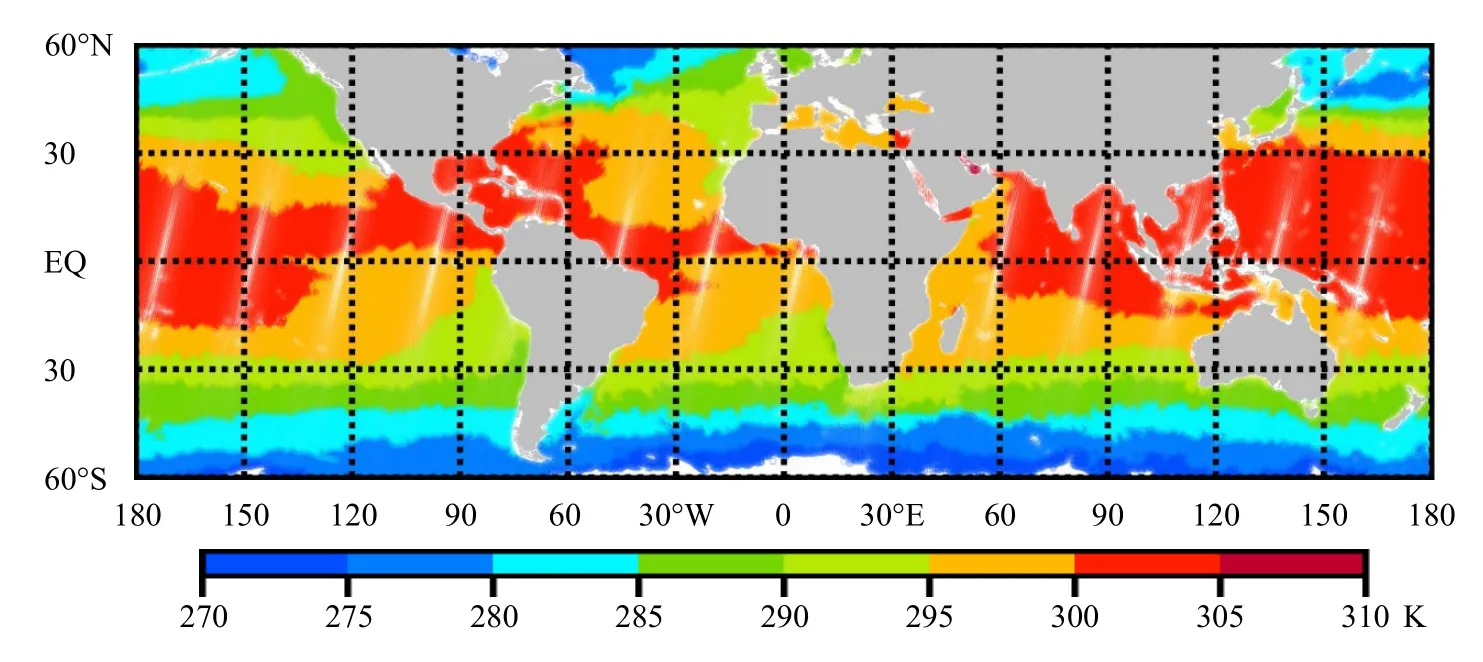
图5 2018 年7 月8 日和ATMS 降轨匹配后的全球海面温度分布Fig.5 Global sea surface temperature distribution matched with ATMS descending orbit on 8 July 2018
4.2 西北太平洋区域云液态水反演结果
选取2021 年7 月20 日西北太平洋区域,分别利用物理和经验算法反演出云液态水路径和大气总可降水(包含升轨和降轨),如图6 和图7 所示。图6 显示,不论是升轨或是降轨,在强台风区域,利用物理算法反演出的云液水数值高于经验算法。但是经验算法反演出的云水覆盖面积大于物理算法。取一组结果进一步对比,由图6a 可以看出,该区域内有大范围细小的云水分布,数值为0.01—0.1 kg/m2,对应到图6b 则为无云区。结合当日可见光云图(图10)可以看出,物理算法与可见光云图对应较好,经验算法会将部分非云区误判为有云。图7 为大气总可降水量,对比图7a 和b 可以看出,物理算法在台风眼区总可降水范围低于经验算法。产生物理和经验算法反演结果差异的原因,一方面是经验算法在回归系数时将海面温度假设为285 K,不能代表全体洋面温度,尤其是在西北太平洋区域,洋面温度普遍接近300 K;另外,由于经验算法会使反演出的云水覆盖面积增大,故该算法反演出的大气总可降水在强台风区与物理算法结果相比范围扩大。
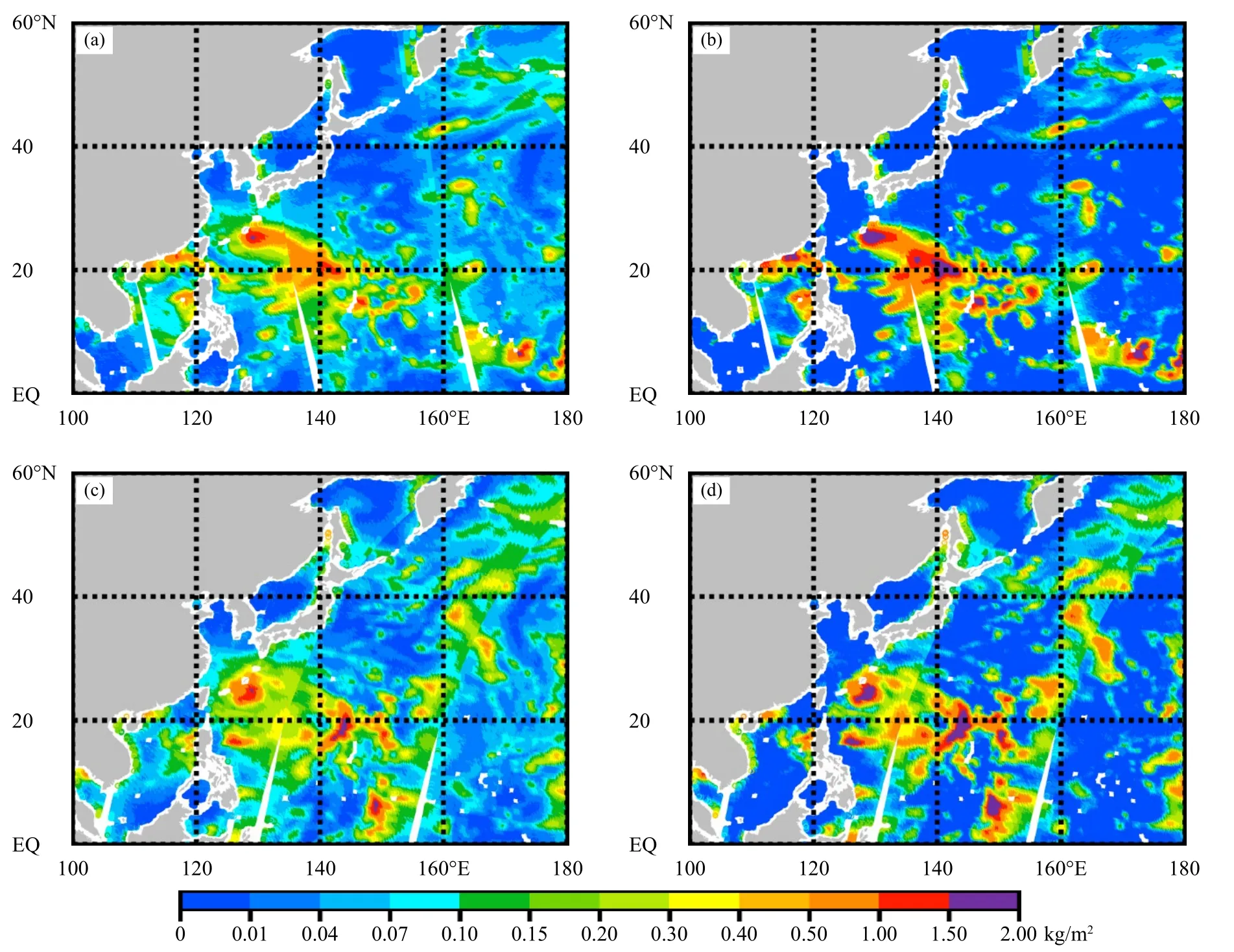
图6 利用ATMS 观测亮温反演的2021 年7 月20 日西北太平洋云液态水路径(a.经验算法(升轨),b.物理算法(升轨),c.经验算法(降轨),d.物理算法(降轨))Fig.6 Cloud liquid water retrieved from ATMS in the Northwest Pacific on 20 July 2021(a.the empirical algorithm(the ascending orbit),b.the physical algorithm(the ascending orbit),c.the empirical algorithm(the decending orbit),d.the physical algorithm(the decending orbit))
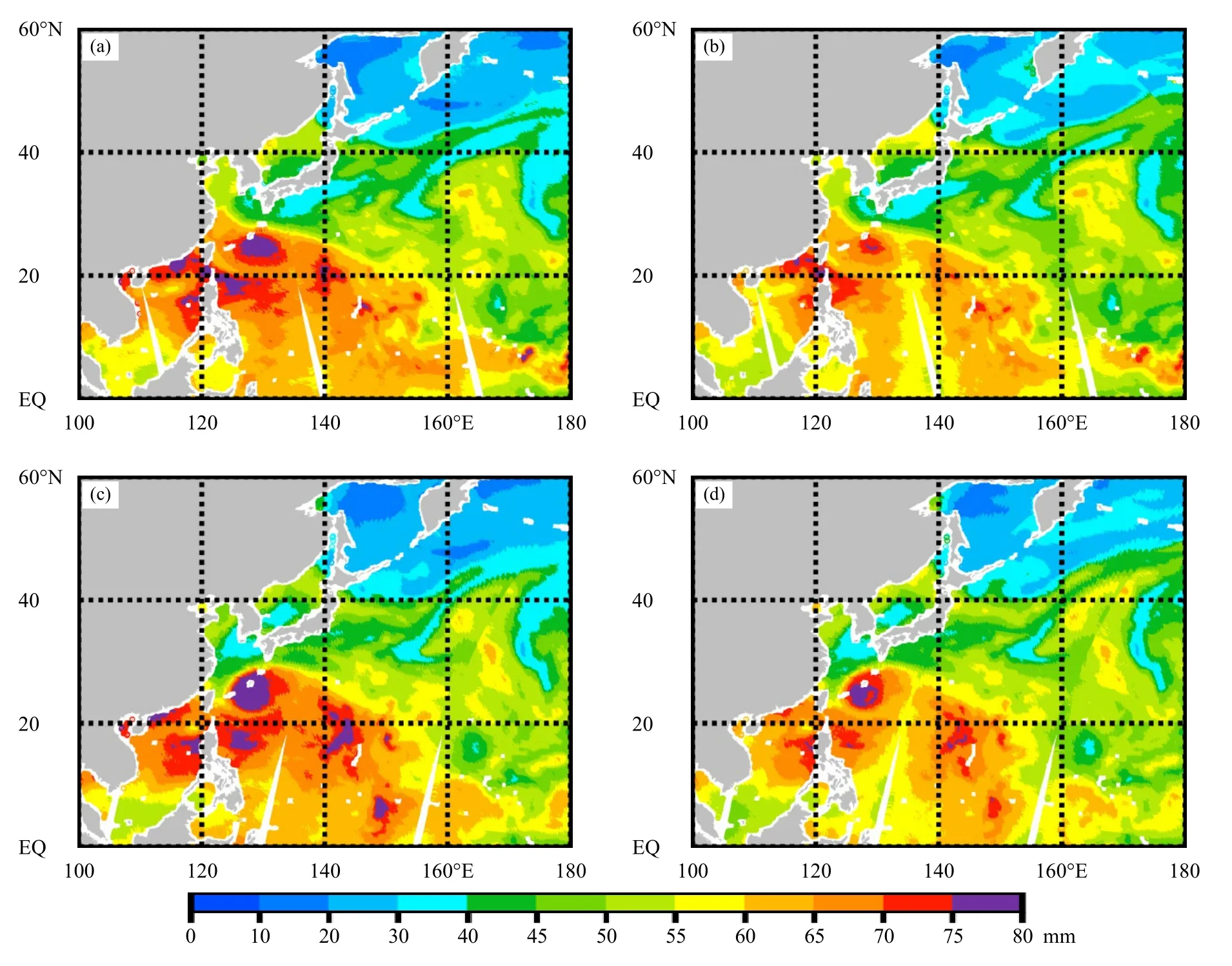
图7 利用ATMS 观测亮温反演的2021 年7 月20 日西北太平洋大气总可降水量(a.经验算法(升轨),b.物理算法(升轨),c.经验算法(降轨),d.物理算法(降轨))Fig.7 Total precipitable water retrieved from ATMS in the Northwest Pacific on 20 July 2021(a.the empirical algorithm(the ascending orbit),b.the physical algorithm(the ascending orbit),c.the empirical algorithm(the decending orbit),d.the physical algorithm(the decending orbit))
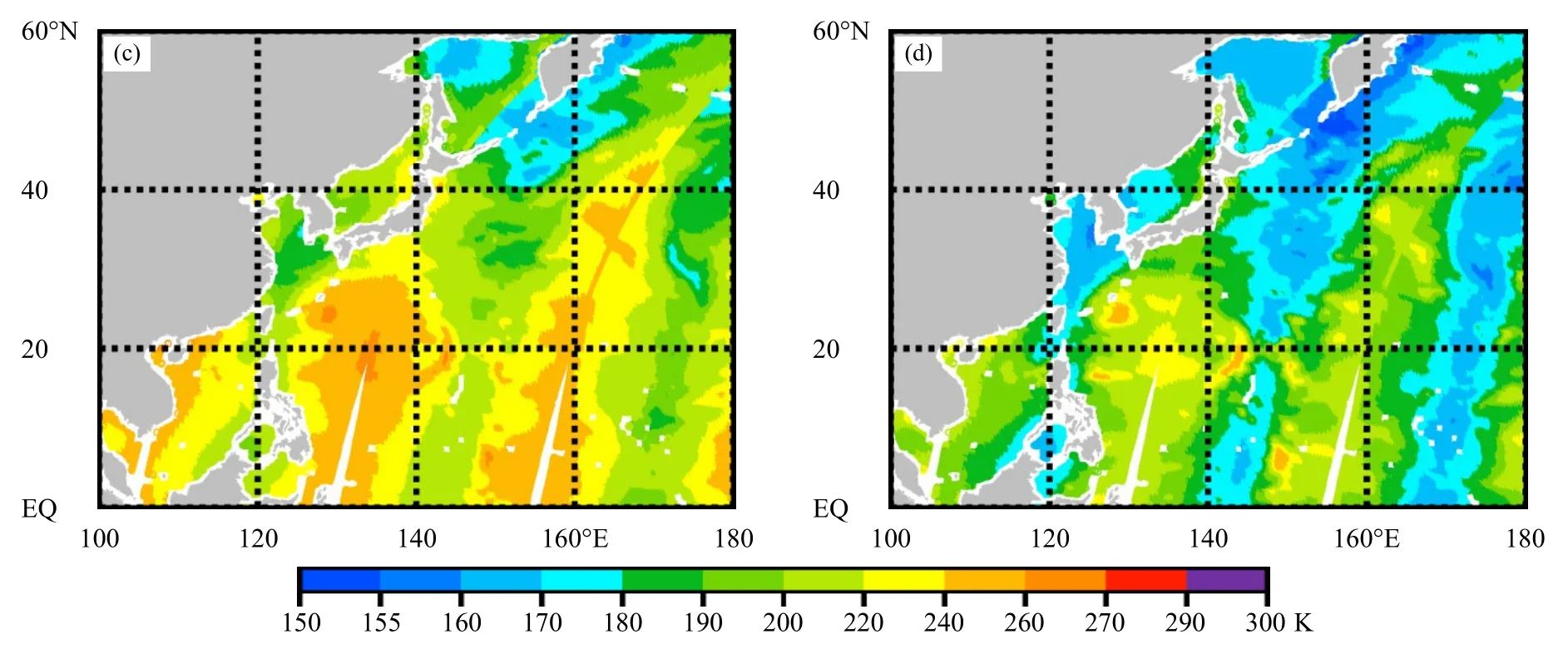
从图8 两个窗区通道观测亮温可以看出,频率为23.8 GHz 的通道亮温在台风区域最高可以超过270 K,频率为31.4 GHz 的通道亮温为240—260 K。结合图6 云液态水反演结果以及图9 风速可以看出,有云产生的区域风速普遍在9 m/s 左右,台风眼区域最大风速超过22 m/s。综上可以得出结论,云液态水含量高的地方通道观测亮温和风速都较大。
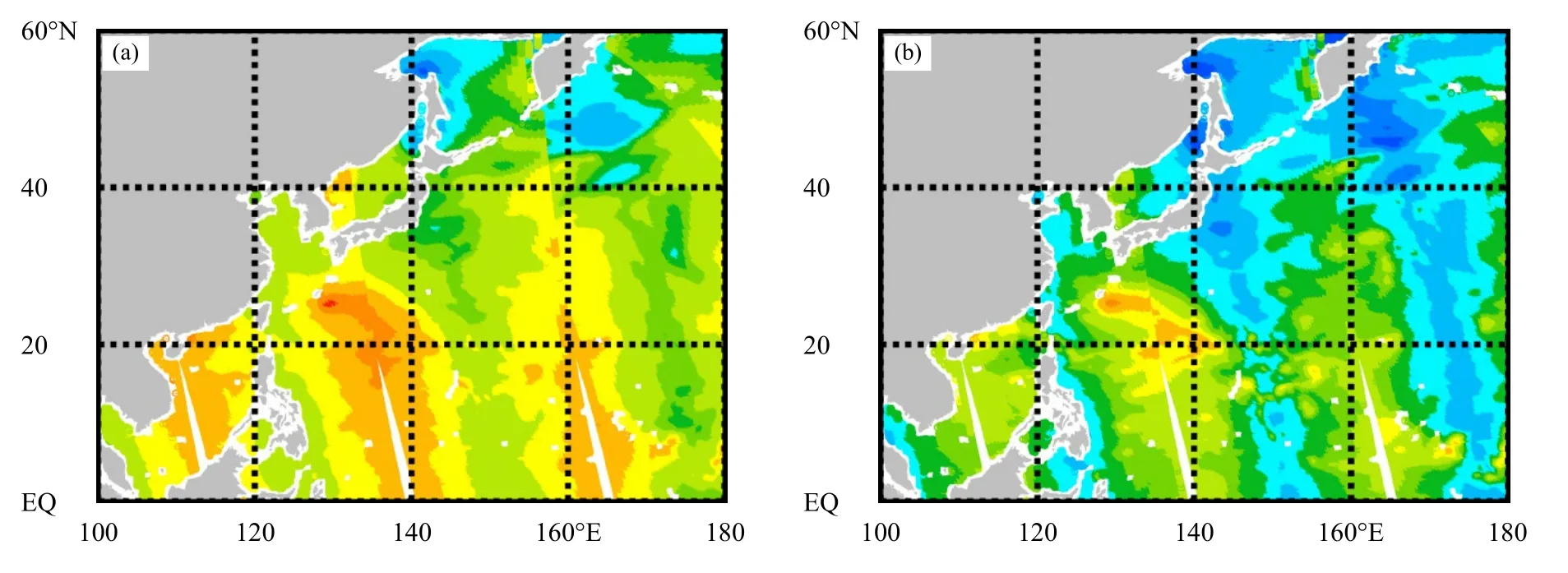
图8 2021 年7 月20 日西北太平洋ATMS 观测亮温(a.通道1(23.8 GHz)升轨,b.通道2(31.4 GHz)升轨,c.通道1(23.8 GHz)降轨,d.通道2(31.4 GHz)降轨)Fig.8 Brightness temperatures observed by ATMS in the Northwest Pacific on 20 July 2021(a.channel 1(23.8 GHz)ascending orbit,b.channel 2(31.4 GHz)ascending orbit,c.channel 1(23.8 GHz)descending orbit,d.channel 2(31.4 GHz)descending orbit)
续图 8 Fig.8 Continued
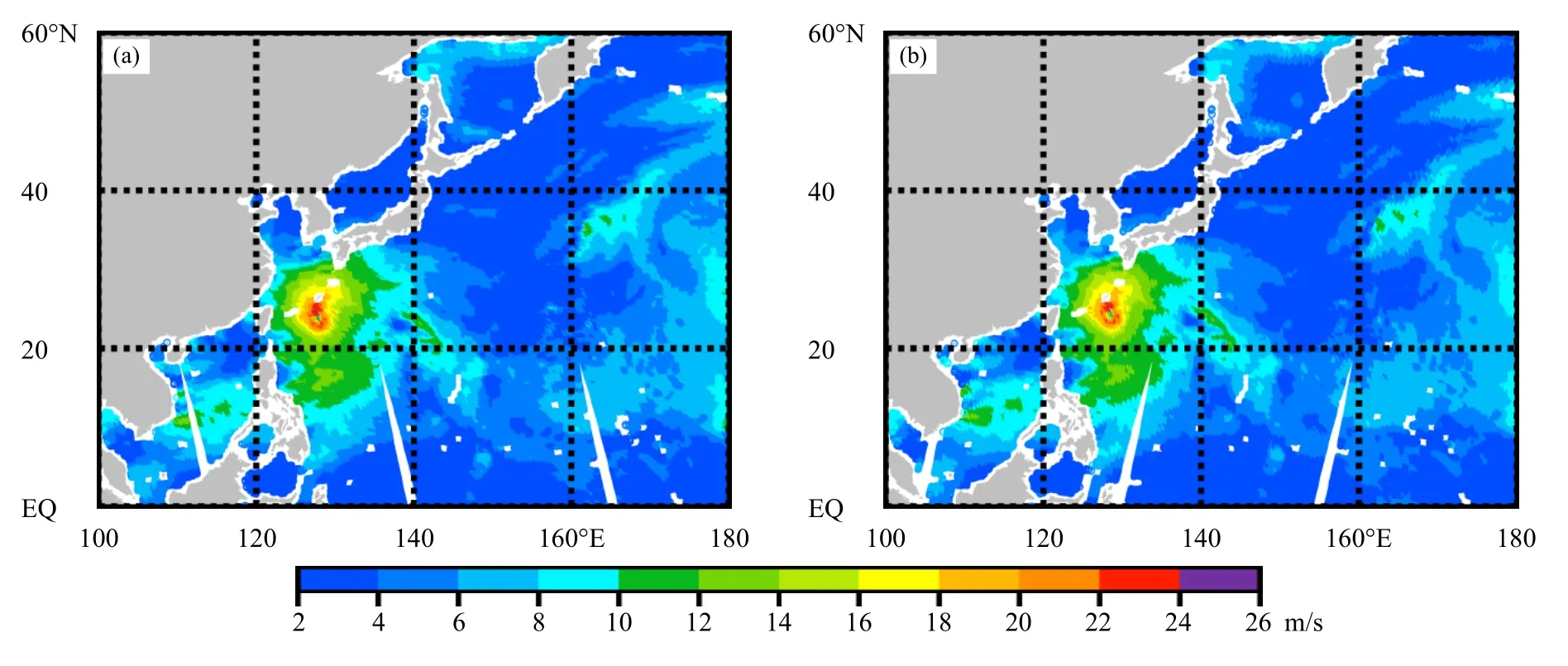
图9 ATMS 匹配的2021 年7 月20 日西北太平洋海面风速(a.升轨,b.降轨)Fig.9 Wind speed over the Northwest Pacific Ocean on 20 July 2021 matched with ATMS(a.ascending orbit,b.descending orbit)
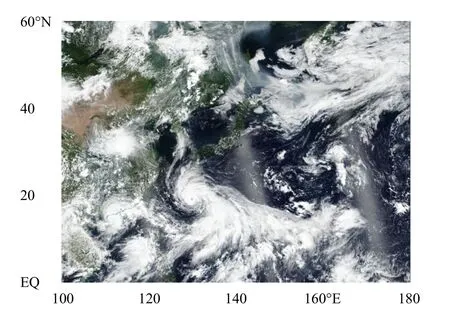
图10 2021 年7 月20 日西北太平洋可见光云图Fig.10 VIIRS visible band image over the Northwest Pacific on 20 July 2021
4.3 不同算法云液态水随纬度带分布结果
在利用不同算法反演出云液态水路径的基础上,分别选取了同年1 月(2018 年1 月1—8 日)和7 月(2018 年7 月1—8 日)一周的数据进行统计,得到它们随纬度带分布的变化。
物理算法计算过程中需要输入真实的海面温度、海面风速和云层温度,目前海面温度和风场信息可以通过各种观测反演产品或者再分析数据获得较为可靠的值。但是云在不同类型和高度等情况下温度均有所不同,很难获得较准确的云层信息。因此,文中做了两种假设,第一种以海面温度为基准,大气的温度随高度升高而下降,故假设在不同海面温度分布的条件下,将云温近似为海面温度−8℃;另一种假设普遍有云的情况下,其温度为2℃,其他参数不变,对云液态水路径进行反演。此外,在对比时加入了MIRS 云液态水路径产品,将同一种仪器(ATMS)的不同结果清晰地显示出来,如图11 所示。MIRS 为NOAA 微波集成反演系统,云液态水路径是该系统反演的业务产品。
从图11a 可以看出,1 月经验算法在中高纬度反演出的云液态水路径高于物理算法和再分析资料,偏差约为0.05 kg/m2,这与图1 分析的结果一致。而MIRS 产品在40°—60°S 和经验算法结果相近,在40°—60°N 与物理算法接近。40°—20°S 几种算法结果较为接近,1DVar 产品与第二种物理算法(假设云温为2℃)几乎重合。从南纬40°到赤道附近,第一种物理算法(以海面温度估计云温)与经验算法几乎重合,可以看出,对于物理算法,不同海面温度对云液态水路径的影响可能不如云层温度大。对于北半球,在中高纬度地区由于冬季海面温度较低,使得经验算法反演出的云液态水被高估。因此,利用真实的海面温度、风速,以及如何更加准确的确定云的温度对于提高物理算法反演精度至关重要。
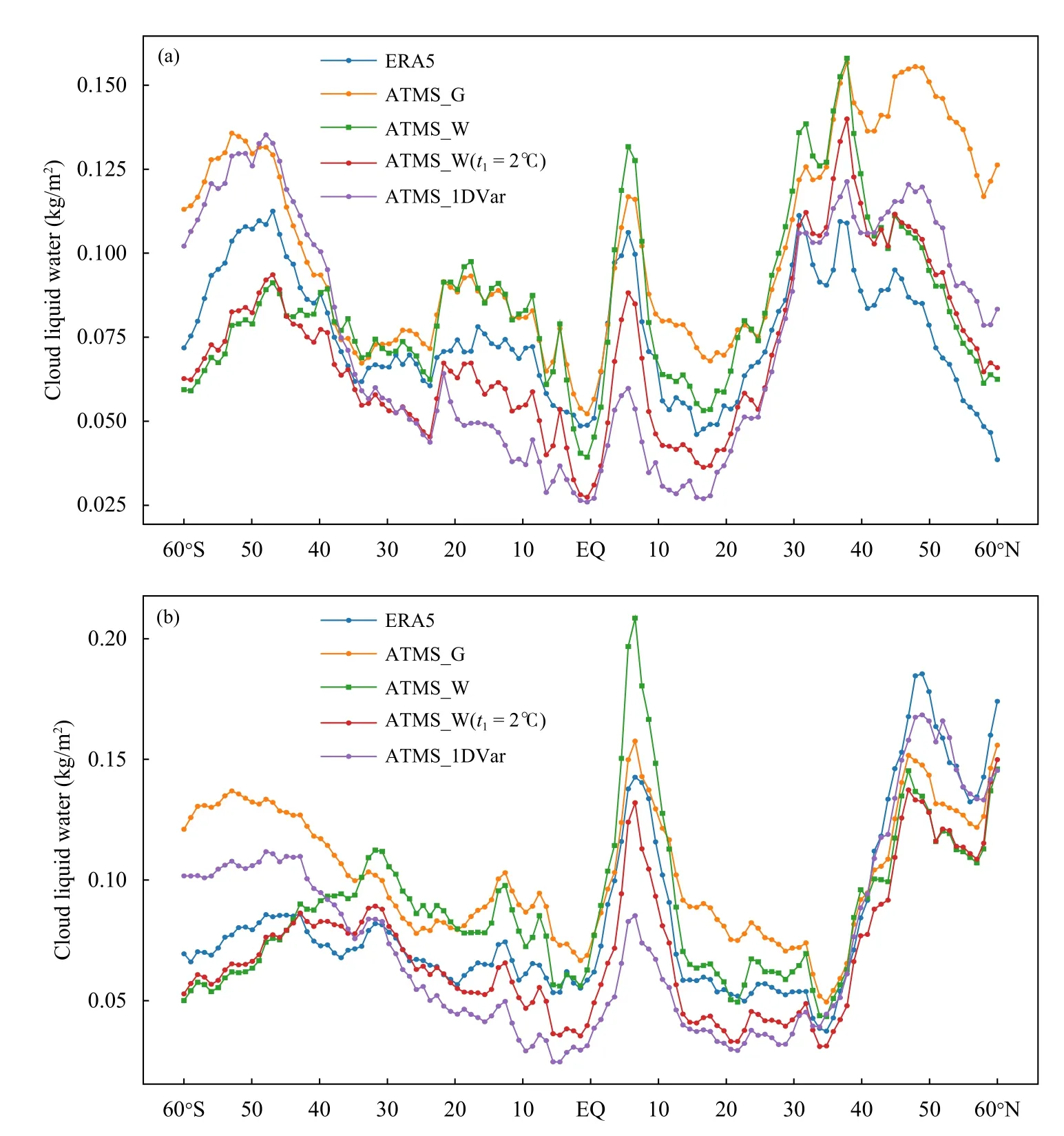
图11 2018 年云液态水随纬度带分布结果(a.1 月,b.7 月)Fig.11 Zonal mean cloud liquid water in(a)January and(b)July,2018
对比图11b,可以看出云液态水随季节变化分布情况,7 月和1 月总体趋势相近。不同的是,在北半球中高纬度地区几种算法结果十分接近,而南半球中高纬度地区存在经验算法高于其他算法的情况。同时,7 月和1 月相比,北半球几种算法的重合线向北移了约10°,这可能是由于夏天北半球海面温度升高,此时物理和经验算法的海面温度接近,同时两种应用于物理算法的云温估算结果也较为接近。
另外,结合图11a 和b 可以看出,不论7 月或是1 月,利用海面温度间接确定云温的物理算法,云液态水反演结果在EQ—10°N 均偏高。其原因可能有两点:一是该物理算法反演结果在热带地区晴空区占比较大,进而导致统计数据量减小,同时伴有强对流天气,因此平均值变大;二是云温的不确定,此假设条件下的云温可能会使反演结果偏高,因此准确地获取云层温度对云降水物理算法精度有很大的影响。
总体来说几种算法获得的云液态水路径在全球纬度带上分布趋势一致,南北半球呈对称分布,在中高纬度以及赤道附近几种算法偏差较大,但不大于0.05 kg/m2。
4.4 物理算法误差源敏感性分析
式(14a)为推导出的云液态水路径物理算法的表达形式,该算法基于合理假设并简化近似后的辐射传输模型,将地球物理参数与仪器观测亮温联系起来。因此,辐射传输模型的误差和海面温度、风速以及云层温度的不确定性都会导致反演结果的误差。这些误差和不确定性将在下面的研究中给出,这里没有涉及由云温和辐射传输模型产生的误差。
假定其他因素对反演结果没有影响,此时海温便是唯一的误差源,因此云液态水误差灵敏度与海面温度误差可以写为
式中,a0和a1与物理算法中的系数相同,ε是不同通道下的发射率,µ是天顶角的余弦值,Ts是海面温度,Tb是观测通道亮温,L是反演出的液态水,P、Q和C均为常数。
同理,也可以推导出和海面风速误差相关的云液态水误差:

式中,Ws是海面风速,M、N和D均为常数。结合图9的风速以及对应反演结果(图6)可以看出,一般有云产生的地方风速较大。考虑到文中算法所使用的海面发射率模型与风速有关,因此进一步将云液态水误差灵敏度和海面温度误差写为
式中,ξ23和 ξ31分别为对应于两个通道的常数。
同理,当风速较大时,海面风速的误差和云液态水误差的关系可以写为
式中,ϑ23和 ϑ31分别是对应于两个观测通道的常数。
将基础海面温度和风速分别设为286 K 和16 m/s,对云液态水进行误差灵敏度分析。从式(17)可以看出,海面温度的误差与云液态水误差并不是简单的线性关系,图12 显示,在相同海面及云液态水状态下,海面温度的变化对其影响程度不同。例如在风速约为16 m/s,云液态水为0.3 mm,海面温度在286 K 的条件下(图12 蓝线),海面温度误差增大3%时,云液态水误差几乎无变化;但当海面温度误差减小3%时,云液态水误差达到0.025%。同时,从图12 可以看出,当海面和大气状态变化程度相同时,海温对含量高的液态水更加敏感。
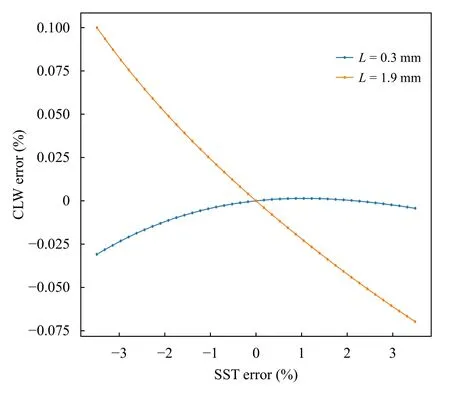
图12 在不同大气和海洋条件下,由海面温度误差导致的云液态水误差Fig.12 Cloud liquid water(CLW)errors caused by sea surface temperature(SST)errors under different atmospheric and surface conditions
图13 显示,当云液态水含量为0.3 mm 时,海面风速误差变化30%,云液态水误差变化0.6%;当云液态水含量为1.9 mm 时,海面风速误差变化30%,云液态水误差变化0.5%。可以得出结论:当云液态水含量较大时,风速对云液水的敏感性较小,即风速对液态水含量小的云影响更大。
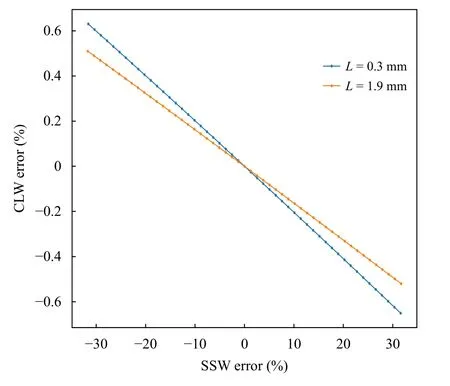
图13 在不同大气和海洋条件下,由海面风速误差导致的云液态水误差Fig.13 Cloud liquid water(CLW)errors caused by sea surface wind(SSW)speed errors under different atmospheric and surface conditions
5 结论和讨论
利用ATMS 观测数据分别采用物理和经验算法对云液态水含量和大气可降水进行反演,将结果进行对比分析。同时对物理算法进行了敏感性分析,得出以下结论:
(1)利用不同算法获得ATMS 在2018 年7 月8 日的全球海洋上空云液态水路径分布,当日台风玛利亚以及热带地区云带分布位置对应较好。中纬度地区经验算法云液态水反演结果高于物理算法和再分析资料,通过差值图对比可以看出,物理算法与再分析资料云液态水路径结果更为接近。
(2)针对2021 年7 月20 日西北太平洋进行反演,经验算法反演出的云液态水在强降水区域低于物理算法。对比当日可见光云图得出结论,物理算法反演结果较为合理。
(3)对ATMS 几种算法在不同季节纬度带分布进行统计。结果显示,物理、经验算法和其他算法在纬度带上分布趋势一致,总体偏差不超过0.1 kg/m2。由于经验算法的局限性,只有在海温为285 K 时(中纬度地区)物理和经验算法吻合度较高。对于物理算法,不同云层温度对液态水反演结果影响较大,因此更加准确地获取云温对物理算法精度提高至关重要。
(4)通过对物理算法的误差源进行敏感性分析,初步推断,目前云层温度可能是云液态水反演误差的主要来源。当云液态水路径较小时,海面温度越高,其对云液态水的影响越小;当云液态水路径较大时,海面温度越高,云液态水误差灵敏度越高。有云产生的地区风速一般较大,风速对液态水含量较小的云影响比液态水含量高的云大。
基于星载微波探测仪云液态水反演算法已经趋于成熟,对于ATMS,物理算法从理论和实际验证效果都优于经验算法。其优点是能够有物理约束条件,从而大幅度减小了对云的误判。两种算法仅适用于海洋,物理算法还依赖于其他辅助参数。这些辅助参数的不能确定会给物理算法带来一定的误差。
致 谢:感谢胡皓博士细致地审阅了初稿并提出了很有意义的修改意见。