月球轨道器光学线阵相机成像仿真方法与实现
2022-04-28刘世杰
曾 佳,陈 晨,刘世杰
(同济大学 测绘与地理信息学院,上海 200092)
0 引 言
月球是人类探索宇宙的第一步,是中国深空探测的首站。2007年,中国“嫦娥一号”探月卫星成功发射,进行了环月综合探测,获取月表图像,制成了中国第一幅全月球影像图和全月球数字高程模型(Digital Elevation Model,DEM)。“嫦娥二号”卫星则在一号卫星的基础上有更高的精度,制作了国际上领先的分辨率达到7 m的全月球数字影像图和全月球数字高程模型。而月球轨道器卫星相机成像仿真是月球正射影像获取的逆过程,可以对探月卫星和相机参数进行验证,优化飞行任务的设计,为后续探测任务奠定基础。
“嫦娥一号”和二号卫星搭载的线阵CCD(Charged couple device)相机,能产生多幅同轨的重叠影像,时间差异小,角度不同,从而可以组成立体像对。1983年,法国地球研究所(IGN)对第一台卫星推扫式扫描仪SPOT进行严格的几何建模,第一个推扫式成像卫星模型诞生;Ebner等人对MOMS-02三线阵相机影像模拟展开研究。
同时,基于地球卫星SPOT在三峡地区的影像数据,江万寿等人研究了卫星三线阵CCD相机影像模拟,讨论了根据DEM数据和正射影像确定投影中心轨迹、姿态模拟以及影像生成等过程。随着信息技术的不断发展,3D模型模拟数据源、光线追踪等技术被运用到线阵CCD相机成像仿真中。张晓寒则搭建了包括推扫式成像在内的多种模式半物理卫星成像仿真系统,从原图数据处理到图像质量评价整个过程进行了集成。岳庆兴等人建立了更为精细的地面模型,提出了亚m级卫星TDI(Time delay and integration)CCD相机立体影像仿真理论。三维仿真方面,汪志良以OpenSceneGraph渲染引擎和osgEarth为工具,搭建了三维地球卫星成像仿真系统。
探月任务相较于常规的地球探测任务更加复杂,成本更高。李巧枝等人以共线方程为基础,考虑了双向反射效应,对月球线阵相机进行影像模拟。在可视化方面,左维等人根据嫦娥一号影像资料和激光测距数据,构建了基于OpenGL的月球三维可视化系统,但其功能主要在于月球漫游和数据存储。月球轨道器线阵相机成像模拟资料较少,且大多止步于生成静态图片,未能与三维仿真和可视化系统结合起来。
本文在探月卫星轨道和姿态模拟基础上,结合月球DEM数据和月球正射影像资料,采用严密的方法,基于共线方程建立了月球轨道器相机几何成像模型;迁移数字微分纠正正解法的思想,研究并实现了月球轨道器相机成像仿真算法,基于OSG建模完成三维月球卫星场景仿真,最后生成了双线阵相机前视和下视仿真图像,并对其进行影像质量评价。
1 成像仿真方法
月球轨道器相机成像模型旨在构建仿真影像和月面之间的几何关系,成像算法在成像模型的基础上进行月面投影点求解和灰度值采样,由此得到仿真影像,此后进行仿真影像的精度分析。仿真实验流程见图1。

图1 仿真实验流程图Fig.1 Flow chart of simulation experiment
1.1 卫星轨道姿态模拟
探月卫星轨道参数包括半长轴、偏心率、轨道倾角、升交点赤经、近月点角距、平近月点角一共6个基本参数,卫星轨道可以由这6个参数唯一确定。
假设线阵CCD相机中心指向月心,根据传感器位置计算姿态矩阵,将卫星某时刻在月固坐标系下的位置和速度表示为:

其中,位置和速度都是随时间变化的,从卫星轨道坐标系到月固坐标系的姿态矩阵(转换矩阵)为:


1.2 相机成像模型
根据共线方程构建影像坐标和月面投影点坐标的几何关系。时刻前视和下视立体相机成像的共线方程可以写为:


1.3 月面点求解算法
月球轨道器相机成像仿真的任务在于求解原始影像和月面之间的几何关系。正解法为从仿真图的像点坐标出发求解投影光线与月面相交点的坐标,反解法要从月球DEM上取格网点计算对应焦平面像素坐标,计算较为复杂,故选用正解法。
由于初始时月面点三维坐标(,,)都为未知量,故要预先计算作为近似值先求解,,再读取月面数字高程模型数据计算得到,再将代入公式进行迭代,直到把值近似值和月面真实值之差控制在一定范围内。
由前文建立的月球轨道器相机几何成像模型,结合数字微分纠正中正解法,月面点求解算法如下[10]:
(1)根据相机参数和像素坐标行列值,构建探月卫星相机成像模型中像素矢量模型,完成像素坐标到像空间坐标的转换。
(2)根据采样时刻的位置和速度计算姿态矩阵,完成像空间坐标到月固坐标转换。
(3)由于正解法月面点坐标(,,)都为未知,要先根据月球标准半径,计算近似值,将像点像空间坐标代入共线方程,求得月球参考椭球面上的月面点月固坐标近似值;再在月球数字高程模型DEM上找到真实月面点;计算共线方程求得的近似点和真实月面点之间距离,若不符合拟定条件,则继续迭代求解。
1.4 仿真影像生成
将所得月面点月固坐标转换为经纬度坐标,再根据月球正射影像格式转换到对应的像素行列值。成像采样时采用双线性内插算法,并不直接将坐标取整,而是保留小数,以像素坐标为中心,读取月球正射影像灰度值进行模拟影像灰度采样。
2 成像仿真软件实现
2.1 实验数据与环境
实验所用的月球数字高程模型DEM是由美国国家航空航天局(NASA)月球勘测轨道器(LRO)上的激光高度计(LOLA)获得的数据,像素分辨率为每像素118 m。月球正射影像数据是由LRO上的侦察轨道器摄像机(LROC)广角摄像机(WAC)采集组成的全月球镶嵌图,像元分辨率为100 m。
使用的系统环境为Windows 10,开发平台为Visual Studio 2019,编程语言为C++,所用库为Eigen 3.4.0、OpenCV 4.5.4、GDAL 2.3.2、OSG 3.6.5。实验中仿真的卫星轨道为正圆形极轨,高度为200 km,偏心率为0,轨道倾角为90°,月球标准半径为1 737.4 km。线阵CCD相机参数见表1。

表1 相机参数Tab.1 Camera parameters
2.2 成像仿真软件
编写基于C#的WinForm界面,将算法实现成月球轨道器线阵相机成像仿真软件,输入为相机立体角、相机焦距等相机参数、卫星轨道模拟数据、月球DEM、月球正射影像数据和生成仿真影像行数,输出为前视、下视仿真图。输入参数并点击“生成仿真图”按钮后,开始生成仿真影像,同时显示生成进度条。仿真软件界面如图2所示。

图2 成像仿真软件界面Fig.2 Software interface of imaging simulation
2.3 基于OSG的三维场景建模
OpenSceneGraph(OSG)是一个高层次的开源3D计算机图形工具包,完全由标准C++和OpenGL编写而成。OSG的场景管理方式为包围体层次(BVH),即采用树状结构将场景节点封装进包围空间体中。一棵场景树BVH包含一个根节点。
本文基于OSG进行月球卫星三维建模,背景几何节点、月球节点、卫星模型节点、投影线节点、文字节点都为叶节点,包含对应可绘制体的信息;根节点、相机节点和卫星空间变换节点都为组节点,被赋予一些功能或是负责渲染层次。相机节点主要用来设置投影矩阵、观察矩阵、参考系、渲染顺序等;空间变换节点用来设置卫星的位置、姿态,使卫星严格按照模拟的轨道和姿态数据飞行。生成仿真数据后,动态显示月面点经纬度信息,连接卫星的实时位置和投影点三维坐标形成前视、下视投影线,绘制成2个三角形,使得前阶段模型生成的月面投影点数据得到了验证,仿真过程更加生动形象。最终实现效果如图3所示,左下角为下视扫描点实时经纬度,三角形为模拟的卫星投影线。
图3 三维仿真最终效果(局部放大图)Fig.3 The final effect of 3D simulation(local enlarged view)
3 仿真结果与分析
3.1 成像仿真影像结果
仿真影像及对应的正射影像区域如图4所示。
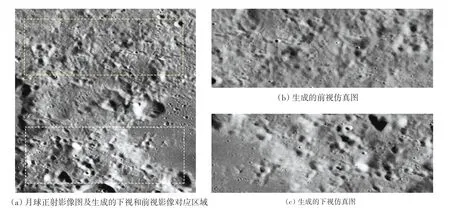
图4 月球线阵相机成像仿真结果示例Fig.4 Examples of imaging simulation results of lunar linear array camera
仿真初始时,卫星在月球约南纬45°西经168°处从南往北飞行,故生成的前视、下视仿真图与月球正射影像图上下相反。生成的前视和下视仿真示例图行高为200像素,像元的空间分辨率约为100 m。
3.2 仿真影像精度分析
为检查模型的正确性,对生成的仿真影像做精度分析:在原始正射影像数据上选取20个明显的检查点,对应到前视和下视仿真图上各10个同名像点,读取前视和下视仿真图像点像素行列坐标值,代入模型,迭代后求出模拟经纬度坐标,与实际的原始正射影像像点经纬度坐标作比较,计算模拟值和真实值之间的残差和标准差。前视和下视仿真图上对应的检查点分布如图5所示。
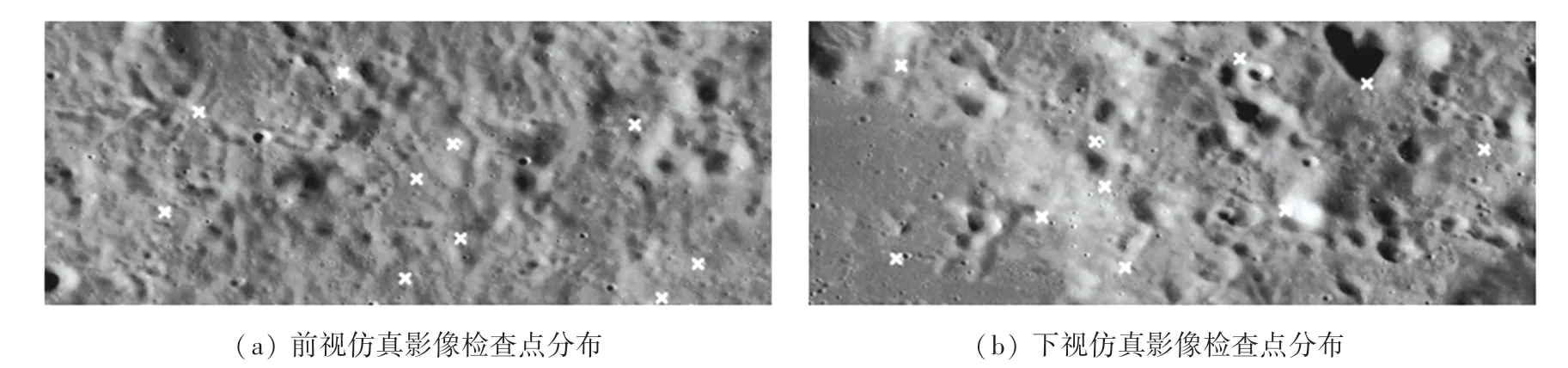
图5 前视和下视仿真图上对应的检查点分布Fig.5 The distribution of forward-looking and down-looking simulation image checkpoints
根据所得数据计算的检查点数据残差的标准差:前视仿真影像在经度(扫描方向)上为0.003 41°,纬度(飞行方向)为0.004 31°;下视仿真影像在经度上为0.004 15°,纬度为0.002 28°。
总体上,本次仿真影像检查点经纬度标准差在0.005°以内,约0.5至0.9个像素,标准差较小,模型能较好地模拟月球轨道器相机图像的生成。
4 结束语
本文基于共线方程构建了严密的月球轨道器相机几何成像模型,实现了月球轨道器相机成像仿真算法,使用双线性内插法进行成像采样;基于OSG进行了三维月球卫星仿真建模,设计了友好的用户交互界面,使用C#完善成探月卫星成像仿真软件对仿真工作进行整合,使得仿真工作工程化、可视化程度高;生成了前视和下视探月卫星成像仿真图像,仿真影像精度评价的结果显示模型模拟效果良好。
