间接测边网在深基坑水平位移监测中的应用
2022-04-27徐远洋赵仲荣孟雨娃
徐远洋,赵仲荣,梅 红,张 雷,孟雨娃
(1.河海大学地球科学与工程学院,江苏 南京 211100)
随着城市建设快速发展,城市道路交通越来越拥挤,地下空间资源的开发利用成为城市建设发展的新趋势。城市隧道交通工程、地铁工程及地下停车场等地下工程中深基坑开挖成为必不可少的项目。城市深基坑具有开挖深、工作面窄、靠近城市道路与居民住宅及地下管线较多等特点[1],由于深基坑周围高楼林立、交通复杂,基准点之间易被障碍物遮挡而无法通视或无法安置仪器,并且基准点易受周围环境影响而产生位移,这对采用传统方法在地面或楼顶布点架站观测建立水平位移监测基准网产生很大的阻碍。对边测量是智能全站仪的一种专用测量功能,可以间接测量基准点之间不通视或无法安置仪器时的距离和高差[2]。采用对边测量方法可以间接测量出基准点之间的水平距离而且操作简单,自由设站,克服了传统方法测量的困难。由棱镜中心构成的间接测边基准网平差时需要确定一个权阵,直接边测量精度可用仪器标称精度加、乘常数予以评定,但间接边测量的精度估算需进一步地探讨与分析。深基坑开挖施工是个复杂的动态过程,基坑水平位移信息的准确性和可靠性取决于间接测边基准网的稳定性,所以在深基坑施工中需要对基准网进行定期复测,并及时对基准网的稳定性作出分析与判断。
1 对边测量及精度分析
1.1 对边测量原理
对边测量即间接测边,是在直接测量边角的基础上,根据余弦定理公式,通过计算得到所需边长的水平距离值。这种测量方法的特点是测量不受施工现场影响,可以自由设站,待测点之间不需要通视就可测出待测点之间的距离。如图1所示,A、B分别是待测的两点,其上安置棱镜,A、B两棱镜之间不能直接测量或不通视。在O点安置智能全站仪,由ATR技术测得两棱镜中心的斜距S1、S2,竖直角分别是α1、α2,以及OA与OB之间的水平角β。
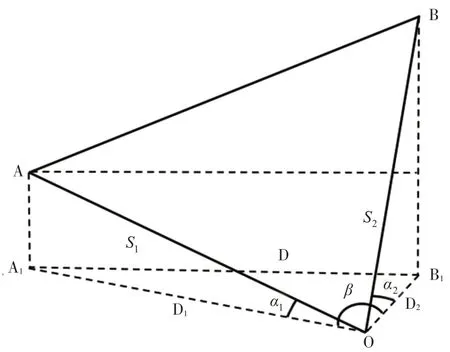
图1 间接测边原理示意图
由此可计算出A、B之间的水平距离,如公式(1)所示。

1.2 精度分析
根据误差传播定律[3],将公式(1)全微分得到AB水平距离D的中误差:
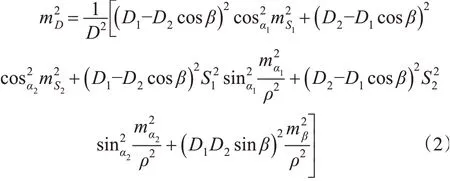
式(2)中,mS1、mS2、mα1、mα2、mβ分别是S1、S2、α1、α2、β的中误差,其中ρ=206 265″,D1、D2分别是O、A两点与O、B两点之间的距离,且D1=S1cosα1,D2=S2cosα2。
在城市深基坑工程中,由于空间狭小、施工范围小等因素限制,基准点之间的距离不长,S1、S2边长相差也不大,边长误差主要以加常数误差为主。同时棱镜在墙面上布设灵活,可使得垂直角较小,因此可 设mS1=mS2=mS,cosα1≈1,cosα2≈1,sinα1≈0,sinα2≈0,从而公式(2)可以简化为如下公式[4]:

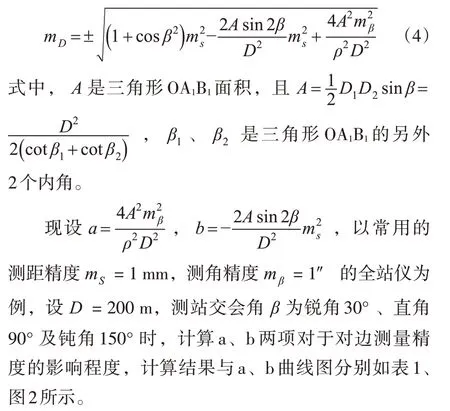
根据三角形OA1B1面积公式和正弦定理公式可将公式(3)进一步转化为:
由表1可以直观地看出,当β=30°、90°、150°时,a、b两项的绝对值差别很小。在图2中,横坐标代表β1,纵坐标代表a和b的值,圆点线、虚线及实线3种曲线分别是β=30°、60°、150°时a、b两项的曲线,从图中可得出a和b的值呈现沿横轴对称的特点,因此可近似认为a、b两项可以相互抵消。最终可将公式(4)近似转化为:
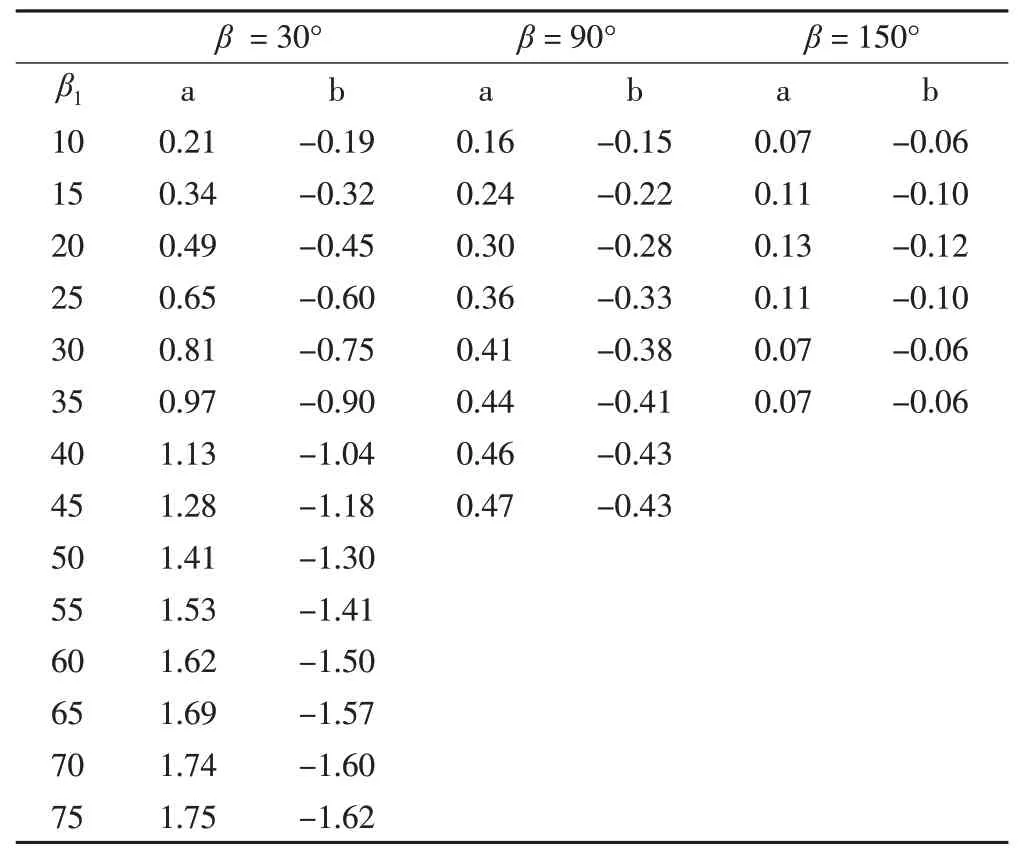
表1 a、b项计算结果/mm
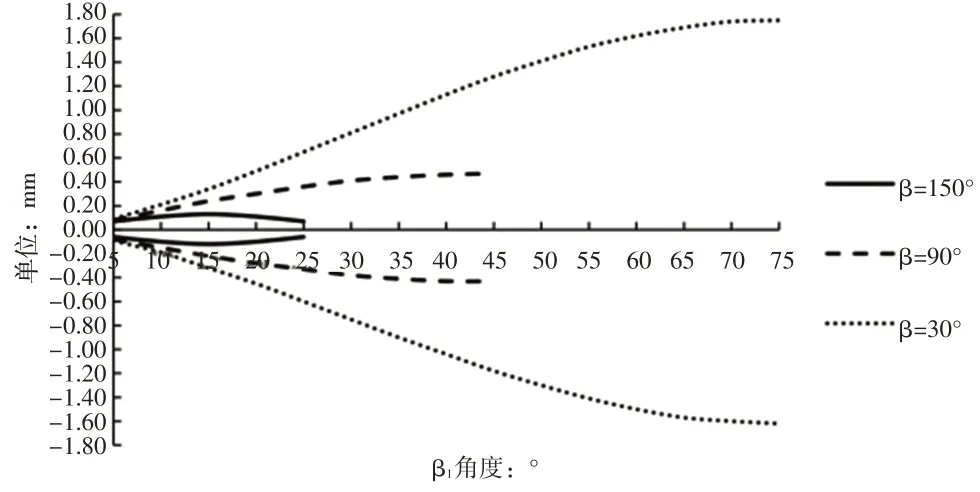
图2 a、b曲线图

将式(5)的间接边测距精度mD与测站交会角β作进一步分析,设mS=1 mm,间接边精度mD与测站交会角β的分布关系如图3所示。
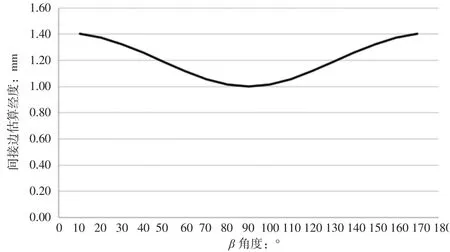
图3 间接边估算精度曲线图
从图3中可以得出,当测站交会角β等于90°时,mD=mS,即间接边与直接边测量精度一致,此时精度最高;当β位于30°~150°时,间接边误差递增可控制在直接边测量误差的30%以内;当β处于50°~130°之间时,间接边误差的递增可控制在直接边测量误差的20%以内,因此,在间接边测量中,尽可能将测站交会角控制在50°~130°之间有利于提高间接边的精度,减小图形因素对间接边测距精度的影响。
2 工程实例应用
2.1 间接测边网平差计算
以南京在建的某过江通道特大直径盾构(15.07 m)接收井为例,该接收井为40.5 m×21 m,基坑开挖深度达45 m,基坑位于繁华的江南地段,周围城市道路交通复杂,临近居民住宅区及地下管线众多。为确保深基坑施工及周边环境安全,建立图4所示的水平位移监测基准网。图中,J1、J2、J4、J5是固定在建筑墙面上的棱镜,J3为混凝土强制对中观测墩,测量时架设棱镜,该点也为GNSS施工控制点,并经连续3 a复测,J3点稳定。JK为设置在冠梁附近的工作基点(观测墩),Leica TM50(测距中误差0.6+1 ppm,测角中误差0.5″)全站仪安置在JK上,使用全站仪ATR技术自动测量10条由棱镜中心构成的独立间接边长。JK至J3、J4的水平距离分别为177.905 6 m、155.315 1 m,在基坑深度的3倍以上位置,间接测边网选取以J3为已知点,J3-J4为固定方向进行间接平差计算获取各基准点的坐标,坐标轴X方向与深基坑长边平行的独立坐标系,JK点测站仪器使用ATR技术对各基准点进行边角后方交会获取测站坐标,然后依次测量冠梁上的监测棱镜,以实现对水平位移监测点的自动测量。
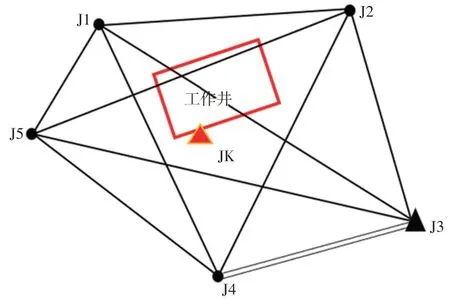
图4 水平位移监测基准网
根据附有限制条件的间接平差的数学模型[5],水平位移监测基准网的误差方程和方位角条件分别为:
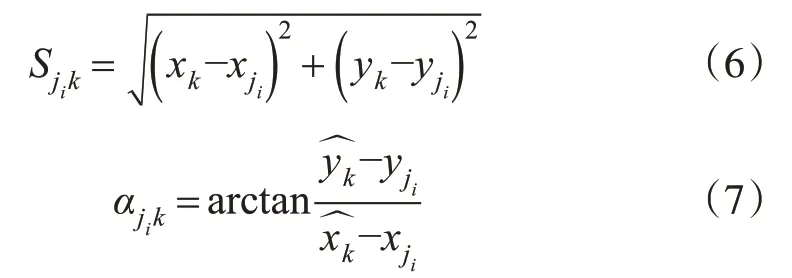
对式(6)、(7)进行线性化可得其误差方程分别为:
基准网共复测了四期,因每期复测的网形一致,故B阵与P阵不变,现以Leica TM50(测距中误差0.6 mm+1 ppm,测角中误差0.5″)测量精度,按式(5)估算第一期各间接边的精度,结果如表2所示。
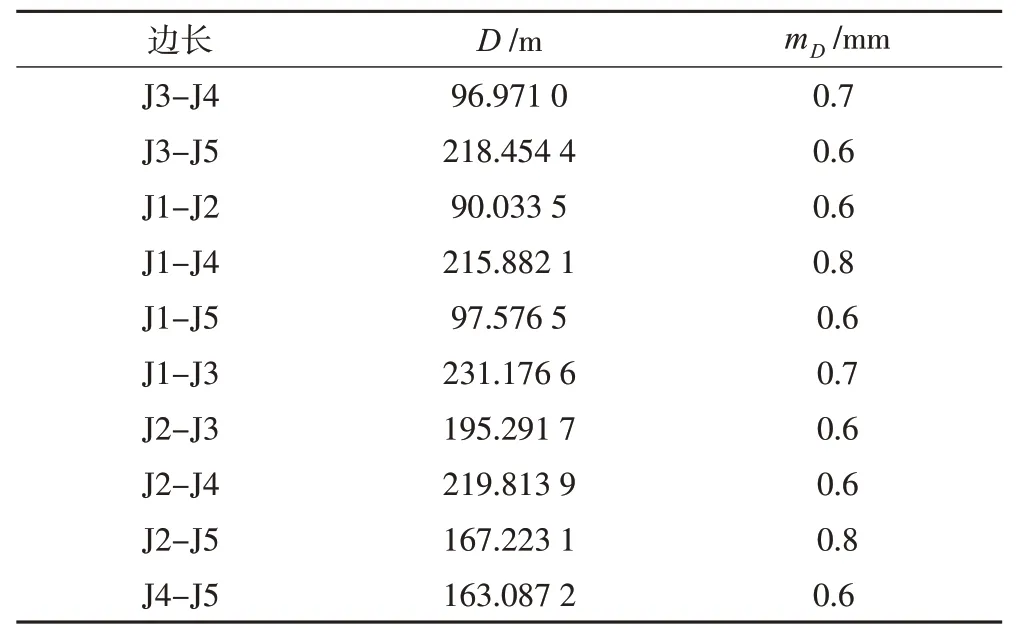
表2 精度估算结果
以每条间接边估算的中误差进行定权,建立法方程中的权阵,对基准网进行平差计算。四期复测网平差结果中,一、三期坐标差相对较大,现以一、三期平差结果的边长误差进行分析,两期基准网平差结果如表3所示。从表3可知,两期平差结果中最弱边长J3-J4(97 m)相对中误差是1/139 000,如果按全网的平均边长170 m,最大边长误差0.7 mm对基准网进行评估,则边长相对误差为1/240 000,达到了《建筑变形测量规范》中一级水平位监测基准网的要求(1/200 000)。
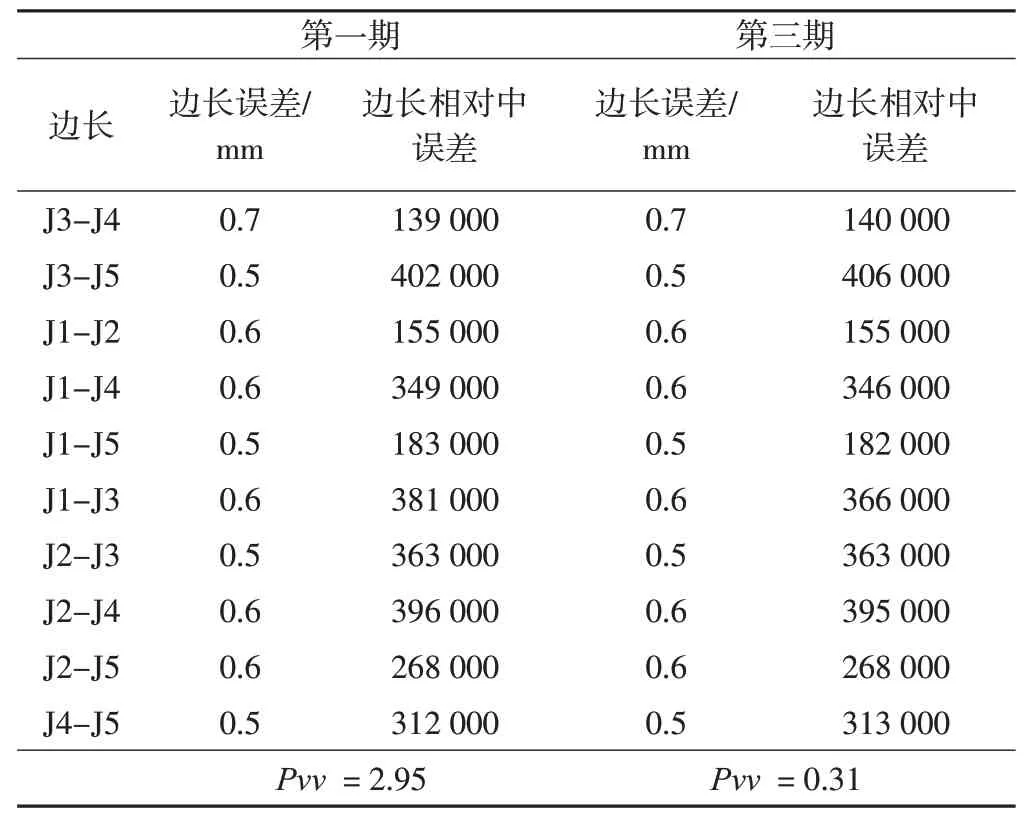
表3 一、三期基准网平差结果
2.2 稳定性分析
在城市深基坑开挖期间,基准点的稳定性直接影响监测数据的可靠性。因此,需要对水平位移监测基准网进行定期复测,并对基准点的稳定性及时作出分析与判断。对基准网稳定性分析采用平均间隙法和单点t检验法是较为有效的方法,首先对两期或多期复测数据进行整体性网形检验,如果检验通过,则判定所有基准点稳定,否则认为平面网中存在不稳定点。由于平均检验法是一种整体检验法,其检验结果判定的位移是平均位移并不是所有的基准点都发生了位移,因此需要使用单点检验法(t检验法)来分析哪些基准点发生了位移[6-8]。如表4、5为一、三两期复测的数据平差后坐标值及差值。
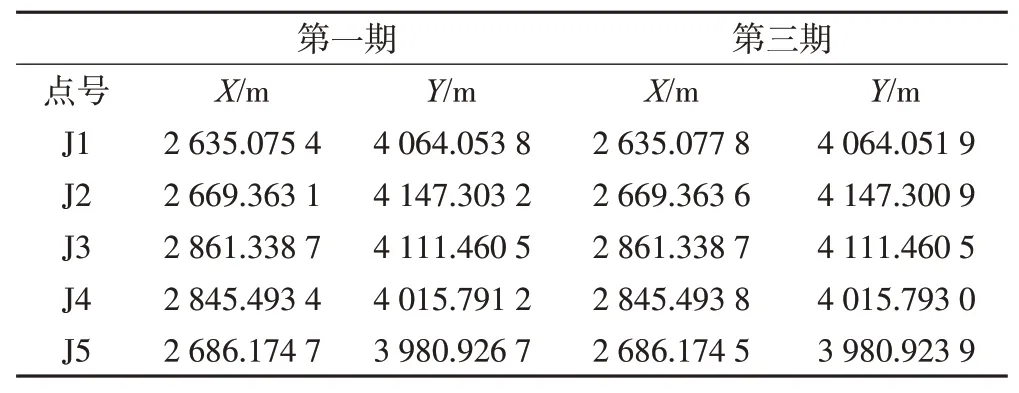
表4 坐标平差值
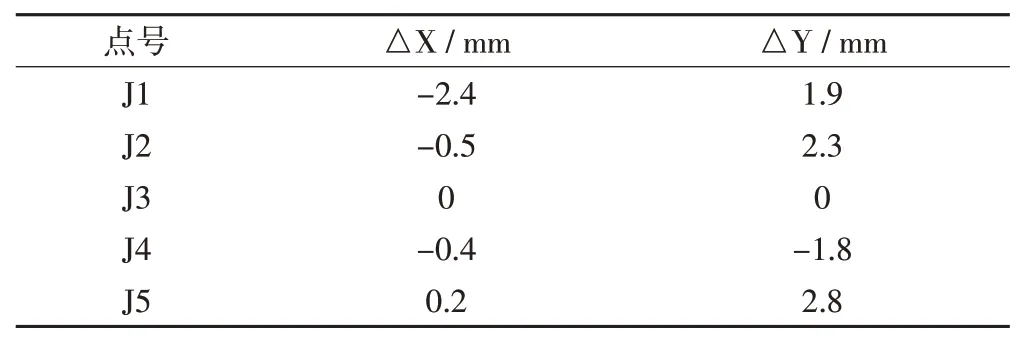
表5 坐标差值
采用平均间隙法进行整体稳定性分析,平均间隙法的假设检验[9-10]为:

如果F>Fα(f S,f),则拒绝原假设,认为平面网中存在不稳定点,反之认为平面网未发生位移或位移不明显。其中α=0.05,fS、f分别是独立坐标差值个数、两期自由度之和。
1)计算两期数据未知点的坐标差:
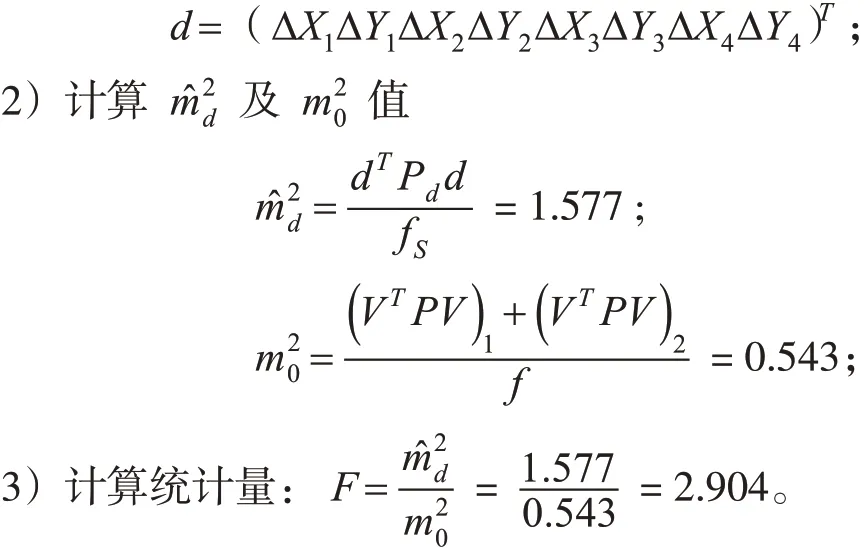
经查表得F0.05(8,6)=4.147,显然F<F0.05,因此该间接测边网并没有发生明显的位移,认为该网及网中的各个基准点都是稳定可靠的,不需要进行t检验。
3 结语
在城市深基坑开挖工程中,采用高精度智能全站仪ATR技术与对边测量相结合的方法构成间接边基准网,使其能够有效解决传统方法组网无法实现的难题。间接边测量精度主要取决于仪器的测边精度,测角误差的影响与测边误差余项的影响基本互为抵消。在建筑物外墙上布设棱镜时,尽可能使直接测距边的垂直角小,测站仪器至两棱镜的交会角控制在50°~130°之间,可使间接边误差的递增控制在直接测边误差的20%以内,以减少图形因素对间接边精度的影响。采用间接边基准网测量新方法可以满足一级平面控制监测基准网的技术要求,为城市深基坑工程施工实现从基准网到监测点一站式自动化监测提供可靠的依据。
