铁路路基沉降数据采集与处理系统设计
2022-04-27朱孝聪
朱孝聪,王 翥
(哈尔滨工业大学(威海) 信息科学与工程学院,威海 264209)
随着我国交通运输事业的迅速发展,铁路在交通运输和人们的出行生活中占据着重要的地位。铁路路基是铁路基础设施的重要组成部分,因此对路基沉降数据进行采集并实时监测是保障铁路安全的关键技术之一。路基沉降数据采集的主要方法有监测桩法、沉降杯法、沉降板法等[1],但是这些方法都存在缺点,后续需要消耗的人力资源比较大,并且无法实现长期的监测。文献[2]设计了结合光学的方法和GPRS 远程传输的路基沉降监测方案,其测量精度高,但是安装测点的成本也高,且由于环境限制,实施条件苛刻。文献[3]设计了基于LoRa 的路基沉降数据采集系统,其功耗低、稳定性高,但是LoRa 模块在野外的故障率很高,现场维护困难。近年来物联网技术和移动通信技术飞速发展,并具有低功耗、广覆盖等优点,物联网技术被应用于很多领域,万物互联已是必然的趋势,在上述基础上本文设计了基于RS485 和4G-DTU 的铁路路基沉降数据采集与处理系统。
1 系统整体结构
本研究系统结构包括数据采集模块、数据远传模块、数据监测模块以及数据处理模块。系统的整体结构如图1所示。每条监测路线有多台数据采集设备和1 个数据传输设备,1 条路线的数据汇聚到1 个点,然后通过4G 网络将数据传输到服务器端。

图1 系统整体结构图Fig.1 Overall structure of the system
1.1 数据采集模块
对比了几种常用的数据采集方法,最终选取压差式静力水准仪作为数据采集单元。选取的压差式静力水准仪型号为HC-D300,量程为0.2~1500 mm,精度为±0.2 mm,分辨率为0.001 mm,系统误差为±0.3 mm,通信方式有RS-485 和RS-232 两种。它由储液器、高精度感应器、处理模块、保护罩等部件组成。压差式静力水准仪的工作原理是利用连通液进行沉降观测[3],多支连通管连接在一起的储液面总是在同一水平面上,通过测量不同储液罐的液面高度,经过计算可以得出各个静力水准仪的相对差异高度值。工作原理如图2所示,A1、B1、C1 为静力水准仪初始状态,A2、B2、C2 为沉降状态。

图2 静力水准仪工作原理图Fig.2 Working principle diagram of static level
1.2 数据远传实现
对于现场的本地数据传输,需要将所有的水准仪数据汇聚到1 个节点。由于本地通信距离比较近,因此可以采取近距离无线通信或者有线通信的方式。近距离无线通信方式包括ZigBee、蓝牙、WiFi、LoRa 等方式,有线通信包括RS485 和RS232。其中蓝牙、WiFi 和RS232 的通信距离短,不符合本设计的要求;LoRa 和ZigBee 这2 种常用的无线通信技术具有自主在免费频段搭建网络、通信距离长且功耗低等优点,但是在野外布设存在现场维护困难的问题;所以最终选择RS485 有线传输作为本地的数据传输方式,RS485 通信距离最大可达1200 m,满足本设计的要求。RS485 只支持串行总线式结构,采用1 条双绞线作为总线将所有的静力水准仪串接起来,同时为了避免信号反射、使引出的线的信号对总线信号影响最小,连接的时候需要注意让总线到每个水准仪之间的距离尽可能短。
通过水准仪将数据采集上来后,下一步要将数据利用远距离无线通信方式传输到远程服务端。常用的远距离无线通信方式有GPRS、NB-IoT、卫星通信、4G、5G 等[4]。GPRS 的通信速率满足需求,但是在通信信号差的地方信号比较弱,存在通信死角;5G通信速度快,但覆盖范围不够广,且费用比较高;NBIoT 与4G 相比,NB-IoT 一次传输数据量较少,当水准仪数量很多时,很难满足实时采集的要求。所以本设计选择传输速率较快、信号更稳定且价格较便宜的4G 作为现场数据与远程服务器的通信方式。
本研究选用的4G 远传设备为4G-DTU,型号为USR-G780 V2,传输速率为1200 bps~460800 bps,工作温度为-25 ℃~75 ℃,端口包含RS485 和RS232,满足设计需求。4G-DTU 与静力水准仪通过RS485总线连接,如图3所示。
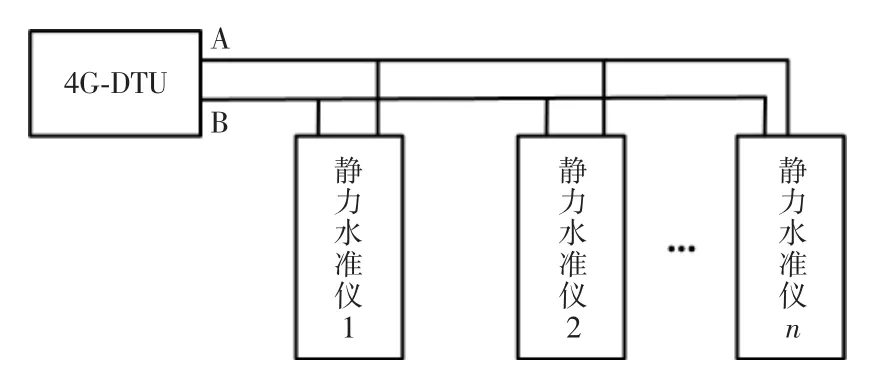
图3 4G-DTU 与静力水准仪连接示意图Fig.3 Schematic diagram of connection between 4G-DTU and static level
1.3 云端监测模块
云端监测模块为B/S 架构,即利用网页可以查看路基沉降的状态。同时还可以看到测点累积沉降变化量的曲线图,对沉降有一个更直观的观测。当累积沉降量达到设定的阈值时,立即将情况反馈给上级。云端监测模块还提供历史数据的下载,为后续路基沉降拟合预测提供便利。
2 系统上位机软件设计
2.1 上位机采集数据程序
在上位机端,利用Java socket 与4G-DTU 通信将数据采集上来,上位机作为服务端,4G-DTU 作为客户端。由于原生的socket 较为简单,本设计采用Netty 框架来完成通信。Netty 是一个高性能、异步事件驱动的NIO 框架,专门针对TCP 协议下的高并发应用,使得整个通信过程更加的稳定。数据采集流程如图4所示。

图4 数据采集流程Fig.4 Data collection flow chart
首先在服务端启动监听端口,当监听到4G-DTU的连接请求时通过TCP 的3 次握手来完成连接。连接成功后,4G-DTU 给服务器发送自己的注册包号,用此注册包来区分不同的DTU。后续即可对4G-DTU发送指令来读取水准仪的数据,流程中Sleep 等待为自定义的循环采集间隔时长。在通信协议方面本设计采用Modbus 通信协议作为数据采集应用层的协议。将数据采集上来后,首先通过CRC-16 校验确认数据传输无误,再将数据解析存入数据库,供后续使用。
2.2 监测页面显示
在监测页面,根据数据库的实时数据自动生成曲线图,实现对沉降数据的直观展示。曲线包括2种,一是每个测点每天的沉降趋势图,二是所有测点的实时沉降数据图,可以根据不同的需求进行查看。此外还可以对历史数据进行下载,包括日报表、周报表和月报表等。
2.3 自动化预警
根据需求将预警值按照严重程度由大到小分为3 级:红色监测预警、橙色监测预警、黄色监测预警。按照控制值的90%、75%、60%作为3 个等级的预警值。当累计沉降达到预警值的时候,系统发出警告,及时通知工作人员加以分析解决,同时传输测点位置信息与实际情况,方便施工人员及时处理。
3 沉降监测数据处理分析
3.1 粗大误差检验
对于任意监测系统,其观测数据或多或少都会存在粗大误差[5]。为了防止误差数据对后续变形分析产生不良的影响,在变形分析开始之前有必要对数据进行预处理,将粗大误差进行剔除。3σ 准则具有简单实用的优点,因此在粗大误差检验中应用较为广泛。下面介绍3σ 准则剔除粗大误差的原理。
对于观测序列{x1,x2,…,xn},描述该序列数据变化特征为

这样由N 个观测数据可得到(N-2)个dj。然后由dj的值可以计算出序列变化统计的均值和方差σ,计算公式为

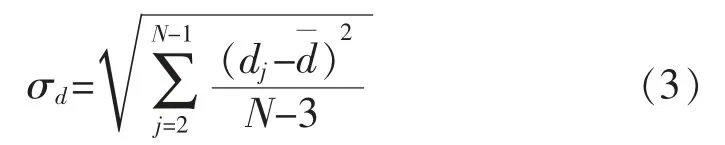
那么dj偏差的绝对值与均方差的比值为

如果qj>3,那么认为此xj为粗大误差值,要予以剔除。
选用的工程实例为胶州铁路路基某一监测点半年的沉降数据,共24 期,见表1。

表1 沉降监测数据Tab.1 Settlement monitoring data
根据表1的数据,通过3σ 准则计算出该测点的沉降数据没有奇异值,可以继续进行下一步的处理。
3.2 数据平滑去噪处理
在信号测量和传输过程中,或多或少都会遇到噪声和干扰。因此在进行预测前还需要对数据进行去噪处理,才能更好地实现预测。下面介绍几种常用的去噪方法,并利用这些方法对已有的实际工程数据进行处理,下文对比分析不同方法的去噪效果。
(1)滑动平均法
滑动平均法(moving average)又称移动平均法,是一种时域上的信号平滑方法。算法的原理为通过顺序逐期增减新旧数据求移动平均值,用来消除偶然误差[6]。
窗口一般为对称窗口,同时防止出现相位偏差,窗口一般为奇数。由于本工程数据量较多,因此采用五点、七点和九点滑动平均滤波。下面以三点滑动平均公式为例,原数据为x,平滑后的数据为y:

将表1的24 期数据进行滑动平均滤波后得到的结果如图5所示。

图5 滑动平均法去噪效果图Fig.5 Moving average method denoising effect picture
(2)小波去噪法
小波变换作为一种继承傅里叶变换局部化思想的新的变换方法[7],其克服了在变换过程中窗口大小不能随着频率而改变的缺点。在变换的时候,通过对输入信号进行伸缩变换和平移运算后,可以实现信号频率的多层细化,不仅可以实现信号频段在高频处进行时间细分和在低频处频率细分的目的,而且可以实现自动适应时频信号分析的各种要求。
小波去噪过程主要分为以下3 个步骤:①小波或小波包的分解;②设定各层细节的阈值;③重构信号。
根据上述小波去噪步骤,利用软件对数据进行小波去噪处理,结果如图6所示。
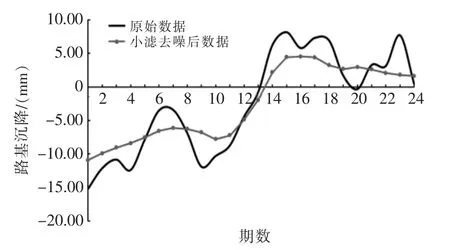
图6 小波去噪效果图Fig.6 Wavelet denoising effect diagram
小波去噪的优点是能够在去除噪声的同时最大程度地保护有用数据或信息不丢失。
上文分析了几种不同的去噪方法,并用不同的方法对数据进行处理,接下来对比分析哪个方法更适用于本工程实际应用。
相关系数是判断曲线拟合程度的好坏,分别将五点滑动平均滤波、七点滑动平均滤波、九点滑动平均滤波以及小波去噪后的数据用不同方法进行拟合,并计算相关系数判断哪种去噪方法在本工程实例应用中效果最好。采用的曲线拟合方法为双曲线法、灰色GM 法和灰色verhulst 法。
双曲线法是将路基沉降数据与观测时间之间的关系用双曲线函数表示出来。其数学方程为

式中:St为观测时刻t 的沉降量;S0为初期沉降量;a,b 为实测数据经过曲线拟合求得的系数。
灰色理论可以对事物的发展变化做出模糊性的预测分析[8],因此可以采用灰色模型基于动态监测数据实现路基沉降拟合预测分析。灰色理论两个重要的模型是灰色GM 模型和灰色verhulst 模型,分别利用这两个模型进行拟合分析。
采用相关系数反应实测数据与拟合数据的密切程度。表2为拟合后的相关系数的对比。

表2 相关系数R 对比Tab.2 Correlation coefficient R comparison
由表2可以看出,九点滑动平均滤波法在本工程实例中有更好的去噪效果。滑动平均便于实时处理非平稳数据,本研究选取的路基沉降数据较为不平稳,因此滑动平均去噪法有更好的效果。对数据进行一系列预处理的目的是为了方便后续进行预测研究的工作。
4 结语
本文设计的以静力水准仪为采集单元、RS485为现场数据传输方式、4G-DTU 为数据远传单元的路基沉降监测及数据采集系统,可以快速、精准地掌控铁路路基的实时状态,帮助工作人员迅速定位路基沉降地点并做出预警决策,降低因灾害带来的生命安全及财产损失。同时也解决了传统方法存在的工作量大、距离受限等问题,具有高精度、全天候等优点,同时将物联网技术成功应用于本系统设计中,具有很重要的实际意义以及广阔的发展前景。本文还对实际工程数据进行了预处理,包括粗大误差的剔除和噪声的处理,得到的结论是,在本工程实际应用中,九点滑动平均滤波的效果优于其他去噪方法,相关系数达到0.952,满足要求。对数据进行预处理的目的是方便未来进行预测的工作的研究,给后续工作提供了便利。
