高超声速类HTV2 模型全目标电磁散射特性实验研究*
2022-04-27马平韩一平张宁田得阳石安华宋强
马平 韩一平 张宁 田得阳 石安华 宋强
1) (中国空气动力研究与发展中心超高速空气动力研究所,绵阳 621000)
2) (西安电子科技大学物理电子学院,西安 710071)
针对临近空间高超声速飞行器目标探测与识别研究的需求,开展了高超声速飞行器非均匀等离子体电磁散射特性模拟测量研究.利用弹道靶设备发射高超声速类HTV2 模型形成模拟的超高速复杂外形目标,弹道靶高精度阴影成像系统和雷达测量系统分别测量高超声速类HTV2 模型姿态、全目标C 波段/X 波段电磁散射特性,获得了不同实验条件下模型全目标雷达散射截面积(RCS)等实验数据.研究结果表明:在不同实验状态下,包覆等离子体鞘套的高超声速类HTV2 模型同一测量波段的RCS 差别超过1 个数量级,模型姿态角对包覆等离子体鞘套的高超声速类HTV2 模型RCS 影响较大,最大相差1 个多数量级;在给定的实验条件下,模型尾迹C 波段RCS 远小于包覆等离子体鞘套的模型RCS,模型尾迹X 波段RCS 显著增强;高超声速类HTV2 模型全目标C 波段电磁散射能量主要分布在模型及其绕流区域,X 波段电磁散射能量主要分布在模型及其绕流区域和等离子体尾迹区域.根据弹道靶实验条件,开展了包覆等离子体鞘套的高超声速类HTV2模型电磁散射特性数值仿真,仿真结果与实验结果之间的最大误差小于4 dB,验证了本文提出的非均匀等离子体包覆目标电磁散射特性建模方法的有效性.
1 引言
临近空间高超声速飞行器再入地面的过程中会与周围大气产生剧烈的摩擦,导致飞行器周围的温度迅速上升.在高温作用下,飞行器周围的不同空气组份会发生化学反应,出现电离现象,从而形成一团包含有自由电子、离子和不带电中性粒子组成的等离子体绕流包覆在飞行器周围.另外,受到高温的影响,飞行器表面的材料也会发生烧蚀现象,产生烧蚀粒子.这些烧蚀粒子会因高温而发生部分电离,产生的电子、离子和中性粒子与等离子体流混合在一起,最终形成等离子体鞘套.等离子体鞘套会干扰雷达对飞行目标的监测、预警,对高超声速飞行器的雷达探测和识别造成困难,严重威胁着临近空间高超声速飞行器的空天安全.因此,对等离子体鞘套包覆的临近空间高超声速飞行器目标电磁散射特性的研究十分必要.
国内外学者对此问题开展了一系列的研究工作.1960 年起,美国国家航空航天局对RAM-C 的整个弹道过程都做了详细的数据采集和分析[1−5].Sotnikov 等[6]分析了高超声速飞行器绕流场湍流引起的电磁散射特性.1999 年,Usui 等[7]基于WKB方法研究了高超声速飞行器等离子体的空间分布特性.2005 年,Mather 等[8]使用气动热化学反应模拟程序数值计算了钝锥模型的化学反应流动,并求解了电磁波在等离子体鞘套中的传播特性.周超等[9]利用FEKO 和物理光学法相结合的方法分析了等离子体对电磁波的衰减机理,并研究了再入段弹头包覆等离子体对目标电磁散射特性的影响.吴巍等[10]提出了一种新方法,模拟了等离子体鞘套目标电磁散射特性的衰减.金铭等[11]利用JF10 高焓激波风洞开展等离子体包覆目标的电磁散射测量实验,观测到等离子体鞘套对C 波段目标电磁散射特性的影响.
目前,等离子体鞘套对高超声速飞行器电磁散射特性的研究方法主要有飞行实验、地面实验以及模拟仿真.飞行实验可获得最真实的实验数据,但耗资巨大,且不具有重复性.由于飞行实验成本较高,理论计算分析和地面模拟实验是研究高超声速飞行器等离子体鞘套电磁散射特性的重要手段.地面实验通过在地面建设相关实验设备以模拟高超声速飞行器的飞行过程.相对飞行实验而言,地面实验成本低且重复性较好.常用的地面实验设备包括弹道靶、激波风洞、高焓膨胀管等[12].针对临近空间高超声速飞行器识别、探测技术的研究需要,本文主要开展了高超声速飞行器非均匀等离子体电磁散射特性模拟测量技术研究工作,并在中国空气动力研究与发展中心超高速空气动力研究所弹道靶设备上完成了高超声速类HTV2 模型目标电磁散射特性弹道靶测量实验,为临近空间高超声速目标探测识别提供技术支持.
2 研究方案
用于开展高超声速类HTV2 模型全目标电磁散射特性研究的弹道靶设备由实验模拟系统、高精度阴影/纹影系统和雷达测量系统等组成.发射器发射超高速模型,模型自由飞,模型/弹托在分离段完成弹/托分离,进入实验段.模型在实验段内飞行时,由于模型与空气的剧烈相互作用,在模型头身部产生高温等离子体绕流场,在其下游产生等离子体尾迹,测量方案如图1 所示.由布置弹道靶实验段的双目前光照相系统、阴影成像系统进行模型激波脱体距离测量、姿态测量等,辐射计、辐射成像测量系统分别测量模型及流场的光辐射强度与辐射亮度,弹道靶单站/双站雷达测量系统对模型及流场的电磁散射特性进行观测,测速与控制系统对模型速度进行测量同时为阴影成像等其他测量系统提供触发信号,靶室与真空系统提供实验需要模拟的大气密度,质谱仪测量靶室内气体组分.调整模型发射速度和靶室压力,可以产生实验研究需要的非均匀等离子体鞘套.等离子体鞘套包覆模型雷达散射截面积(RCS)测量结果主要用于验证动态等离子体目标电磁散射分析模型.
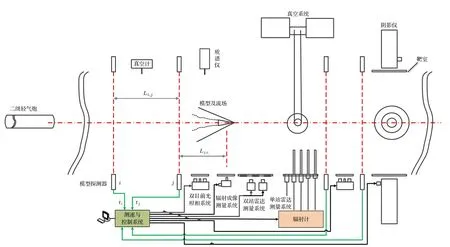
图1 弹道靶高超声速类HTV2 模型RCS 测量实验方案Fig.1.Experiment setup of electromagnetic scattering characteristics measurement for the simplified hypervelocity HTV2 flight model in the ballistic range.
2.1 实验设计
2.1.1 实验模型设计
利用弹道靶高超声速类HTV2 模型研究等离子体鞘套对目标本体电磁散射特性的影响.以HTV-2 飞行器迎风面外形为基础,采用钢铝合金和聚碳酸酯材料和超韧尼龙开展面对称带翼模型(见图2)及弹托设计与加工.采用两瓣弹托加底托结构,弹托间采用锯齿扣合,弹托与底托间采用销定位,防止两瓣弹托旋转速度不一致;模型和弹托配合面位置选择要保证存在旋转的条件下,模型和弹托一起转动.

图2 弹道靶高超声速类HTV2 模型及弹托Fig.2.Simplified model of the hypervelocity HTV2 and its bracket in the ballistic range.
2.1.2 模型发射速度和模拟飞行压力设计
由于高度在100—60 km 之间的大气密度低,高超声速类HTV2 飞行器与大气作用并不强烈,且处于滑翔初期.因此,其等离子体鞘套特征并不明显;随着滑翔高度的降低大气密度增加,高超声速类HTV2 飞行器在60—40 km 之间的高度可以长时间滑翔,与大气作用明显,且随着时间的累计,高超声速类HTV2 飞行器的等离子体鞘套也越来越强.因此,可以利用气动物理靶二级轻气炮发射超高速带翼面对称模型模拟高超声速类HTV2 飞行器与大气相互作用产生的等离子体流场.模型飞行环境压力利用真空系统控制实现,压力采用二元缩尺律ρ1D1=ρ2D2模拟,模型飞行环境压力采用真空计测量.取飞行器翼展D1=1800 mm,飞行高度H=24—45 km,取实验环境大气温度288.15 K,则模拟实验环境大气密度为
式中,ρ1为模拟高度下的大气密度,单位为kg/m3;D1为飞行器翼展,单位为m;ρ2为模型飞行环境大气密度,单位为kg/m3;D2为模型翼展,单位为m.对应的模拟实验环境大气压强为

实际实验时,模拟实验环境大气温度由当时室内环境温度确定.实际模拟高度需根据实验时测量的P2和T2计算得到飞行器飞行大气环境下的ρ1,再根据ρ1和大气高度与密度关系表插值得到模拟高度H,

2.2 弹道靶高超声速类HTV2 模型姿态测量技术
在弹道靶上开展高超声速模型飞行实验时,对RCS 测量数据进行处理需要有模型在测量位置的姿态数据,由于阴影仪所在位置与RCS 测量位置并不重合,对模型飞行姿态采用至少3 站正交阴影仪加基准测量系统的方式测量推算,阴影仪配置的光源为脉冲激光光源,水平和垂直阴影仪共用1 台激光光源,可确保水平和垂直阴影仪照相时刻一致.基准测量系统是布设在靶室窗口,用于建立窗口间、窗口与靶室轴线间等的相对几何坐标关系.阴影仪窗口上的基准线及各窗口间的相对位置数据是进行照片数据处理的位置基准,实验时基准线被同时拍摄在底片上,除用于确定模型与窗口基准线之间关系外,还可确定照相系统的放大率.将获得的阴/纹影照片结合基准线测量得到模型的飞行姿态,利用基准线坐标值得到模型偏离靶室轴线距离.经过图像处理软件可判读出判读点X,Y向坐标,通过基准线的放大率得到判读点距基准线的实际值.在图3 中,图像点M相对于A基准线的X向距离为
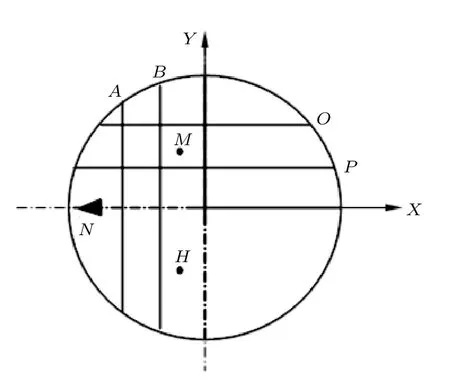
图3 模型与基准线相对位置关系Fig.3.Position of the model relative to the base line.

式中,xM为图像判读得到的图像M点或线的X向坐标值,单位为m;xA为图像判读得到的图像A点或线的X向坐标值,单位为m;xB为图像判读得到的图像B点或线的X向坐标值,单位为m;XAB为窗口A与B基准线的实际测量值,单位为m.
通过阴影仪照片和基准线间的距离关系还可得到模型在垂直方向和水平方向偏离靶室轴线的距离.根据各正交阴影仪站模型的位置参数,利用模型飞行姿态的工程估算方法,即可推算出RCS测量位置处的模型飞行姿态.
2.3 弹道靶高超声速类HTV2 模型及其等离子体鞘套RCS 测量技术
利用弹道靶雷达测量系统获得高超声速类HTV2 模型及其等离子体鞘套总RCS 和一维RCS 分布数据.雷达测量系统的布置如图4 所示,测量波段为C 波段、X 波段,测量方式为单站,垂直极化发射、垂直极化接收.视角与靶室轴线成30°.当模型飞过天线波束区时,模型及流场对入射电磁波产生散射,雷达系统记录模型及流场散射信号的幅值A(t)、相位φ(t)曲线.经过定标、近远场变换,最终得出模型及流场的总体RCS.
为了获得模型及流场沿飞行方向的一维距离像,利用模型及尾迹依次穿过天线波束时产生的多普勒频移信号,经过相位补偿对其进行聚焦后获得等离子体鞘套包覆的模型及其尾迹在模型飞行方向的一维RCS 像.弹道靶测控系统实现模型测速,并且为阴影照相系统、雷达测量系统提供同步时间触发信号,使模型位置、姿态数据与雷达测量数据同步、关联,获得与模型位置、姿态相关的RCS数据.
弹道靶雷达测量系统采用发射低速金属球法进行标定.利用定标球可得目标散射值[13]:

式中,vsphere为定标球运动速度;vtarget为目标运动速度;θ01为X轴正方向到发射天线波束中心的旋转角;θ02为X轴正方向到接收天线波束中心的旋转角;G0(t) 为定标球构造函数;G(t) 为目标构造函数;V0(t) 为定标球测量数据;V(t) 为目标测量数据;RCSsphere(θ01,θ02) 为雷达从θ01方向发射信号、在θ02方向上观察到的定标球远场双站RCS,可通过理论计算获得.
3 实验结果与分析
3.1 模型姿态测量
模型姿态采用3 个姿态角描述:俯仰角、偏航角和滚转角.弹道靶实验获得的阴影图像是利用数字相机直接成像得到的,而在进行模型姿态求解时,需建立对应的坐标系.图像坐标系建立在图像平面上,通常分为像素坐标系和像面坐标系.在图像像素平面上建立直角坐标系Ofuv,如图5 所示.

图5 图像坐标系Fig.5.Image of coordinate system.
以图像左上角Of点为坐标原点,像素为坐标单位,每一像素坐标(u,v)表示该像素点在图像的行数和列数,该直角坐标系被称为图像像素坐标系,像素坐标系定义了阴影成像数字靶面的信号采集过程.
为了建立模型的空间三维坐标与图像空间二维坐标间的透视投影关系,需将图像像素坐标系转换为公制单位表示,由此产生了像面坐标系.如图5中,像面坐标系Oxy以图像的主点O为原点,以公制长度单位(mm)为坐标单位,坐标系中的x轴、y轴分别和图像像素坐标系的u轴、v轴平行[14].
设O点在Ofuv坐标系中的坐标为(u0,v0),每一像素在x轴、y轴上对应的物理尺寸为dx,dy,则图像中任意一个像素点在两坐标下的关系如下:
数字相机坐标系是相对于相机本身,以成像透视中心和图像数字靶面为基础,通常透视中心为原心,以靶面的两个轴向作为两个坐标轴方向.数字相机坐标系OcXcYcZc的定义如图6 所示.
坐标系原点Oc为数字相机的透视中心,Xc轴、Yc轴分别和图像坐标系统的x轴、y轴平行,Zc轴和数字相机的光轴重合,垂直于图像平面,取光轴方向为正.在图6 中,设模型空间某一点P在像面上像点p的图像物理坐标为(xp,yp),在数字相机坐标系下的空间三维坐标为(Xcp,Ycp,Zcp),设数字相机有效焦距为c,在不考虑畸变的透视变换情况下,满足如下关系:
假设物空间模型P点在世界坐标系和相机坐标系中的坐标分别为(Xwp,Ywp,Zwp)和(Xcp,Ycp,Zcp),两坐标系间的关系可用一个3 × 3 阶旋转矩阵R和一个3 × 1 阶平移矩阵T描述:

由于阴影图像就是一种平行光的投影成像方式,在物面的测试区域是平行光透视,可理解为在物面模型是没有变倍的投影,而数字相机配套的成像镜头焦距为定焦镜头,在测试时利用正交阴影成像方式,同时获得在x和y两个方向的投影图像.综合考虑上述的坐标系变换方式,最终获得了模型在空间的偏转角度.由于是投影成像,变换后的角度需考虑模型是否发生翻转情况,结合图像模型尾部突起部分的成像状态进行判定,若出现翻转在计算值基础上增加对应的翻转角度.
3.2 高超声速类HTV2 模型C 波段全目标RCS 测量结果与分析讨论
在实验前,发射低速光滑钢球模型对弹道靶雷达测量系统进行标定,标定结果表明弹道靶雷达测量系统测量误差优于 ± 1 dBsm.利用时域有限差分(FDTD)方法开展了弹道靶高超声速Al2O3球模型及其等离子体鞘套RCS、尾迹RCS 的仿真计算,计算结果与实验测量结果对比如表1 所列.可以看出,数值计算结果与实验结果基本符合,验证了等离子体包覆目标的RCS 计算模型与计算方法的有效性.

表1 弹道靶高超声速球模型全目标RCS 实验测量结果与数值计算结果对比Table 1.Comparison between measurement and numerical results of the RCS of the ball models flying at hypervelocity.
不同实验状态下高超声速类HTV2 模型C 波段全目标RCS 测量结果分别如表2 所列.典型实验状态下高超声速类HTV2 模型及绕流场的高分辨率阴影图像如图7 所示.C 波段单站雷达系统归一化RCS 典型测量结果分别如图8 所示.

图7 高超声速类HTV2 模型高精度阴影照片(11.2 kPa,5.0 km/s) (a) 水平;(b) 垂直Fig.7.High precision shadow photos of the simplified hypervelocity HTV2 models (11.2 kPa,5.0 km/s):(a) Horizontal photograph;(b) vertical photograph.

图8 高超声速类HTV2 模型C 波段全目标RCS分布测量结果Fig.8.Distributive measurement results of the C band full target RCS of the simplified HTV2 models flying at hypervelocity.
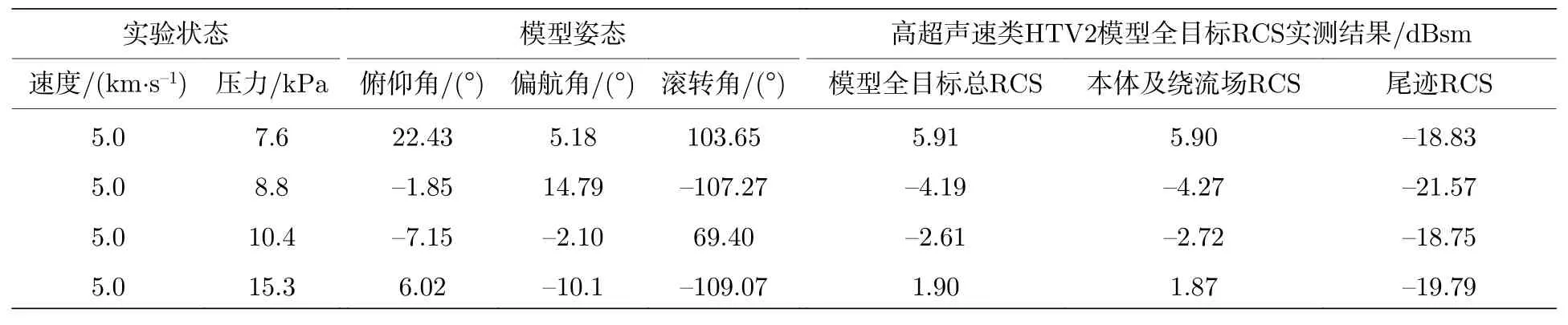
表2 高超声速类HTV2 模型C 波段全目标RCS 实验测量结果Table 2.Measurement results of the C band full target RCS of the simplified HTV2 models flying at hypervelocity.
在给定的实验条件下,高超声速类HTV2 模型表面包覆的非均匀等离子体流场影响模型本体的RCS.在不同实验状态下,高超声速模型本体及包覆等离子体鞘套模型的RCS 差别较大,最大相差1 个多数量级.高超声速类HTV2 模型电磁散射能量分布在模型周围及其绕流区域,模型尾迹的RCS 远小于包覆等离子体鞘套的模型RCS.当出现层流向湍流的转捩后,入射到等离子体湍流的雷达波束沿各个方向散射,单站雷达探测到湍流形成的回波信号.实验压力对模型尾迹电磁散射影响较小.模型姿态角对模型及等离子体鞘套C 波段RCS 影响较大,不同姿态角下最大相差1 个多数量级.在给定的实验状态下,模型尾迹C 波段的RCS 比包覆等离子体鞘套的模型RCS 低1.5—2.5个数量级.
3.3 高超声速类HTV2 模型X 波段全目标RCS 测量结果与分析讨论
不同实验状态下高超声速类HTV2 模型X 波段全目标RCS 测量结果如表3 所列.X 波段单站雷达系统RCS 典型测量结果如图9 所示.在实验条件下高超声速类HTV2 模型表面包覆的非均匀等离子体流场影响模型本体的RCS,不同实验条件下模型尾迹总RCS 差别较大.
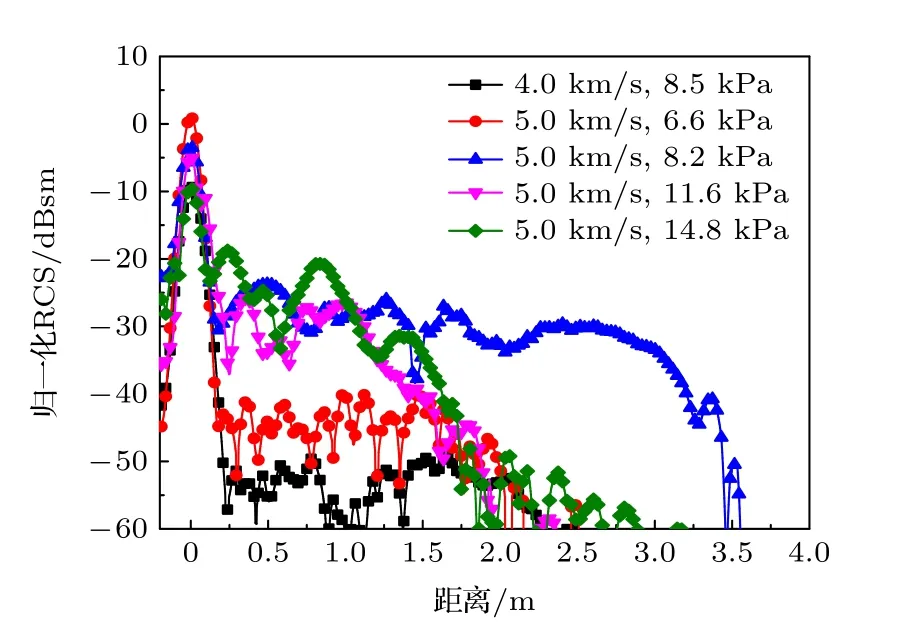
图9 高超声速类HTV2 模型X 波段全目标RCS分布测量结果Fig.9.Distributive measurement results of the X band full target RCS of the simplified HTV2 models flying at hypervelocity.
在给定的实验条件下,高超声速类HTV2 模型电磁散射能量分布在模型周围及其绕流区域、等离子体尾迹区域.高超声速类HTV2 模型全目标电磁散射能量呈现多个散射中心,模型周围及绕流场区域出现1 个强散射中心,模型湍流尾迹出现多个散射中心.当出现层流向湍流的转捩后,入射到等离子体湍流的雷达波束沿各个方向散射,单站雷达探测到湍流形成的回波信号.在实验压力较低时,模型及其绕流电磁散射较强,尾迹RCS 较弱;压力较高时,模型尾迹RCS 明显变大,甚至与包覆等离子体鞘套的模型RCS 相当.高超声速类HTV2 模型尾迹RCS 信号呈现随机分布特性,比背景散射电平高0.5—2.5 个数量级,幅度脉动和频率脉动均没有周期性.模型尾迹RCS 的脉动可能是由尾迹电子密度的脉动引起的.由表3 可见,高超声速类HTV2 模型及等离子体鞘套在不同实验状态下X 波段的RCS 差别较大,最大相差超过1 个数量级.模型姿态角对模型及等离子体鞘套X 波段的RCS 影响较大,不同姿态角下最大相差1 个数量级.在模型速度较低时,模型尾迹总RCS弱,比模型本体RCS 低2—3 个数量级.在模型速度较高时,模型尾迹总RCS 显著增强,比相同压力条件下低速模型尾迹总RCS 增大1.5—2.5个数量级;随着靶室压力升高,模型尾迹RCS 增加.在某些条件下,模型尾迹RCS 接近甚至超过模型及等离子体鞘套RCS,可能是模型尾部填充的聚碳酸酯燃烧引起的.在相同的实验条件下,包覆等离子体鞘套的模型在X 波段的RCS 差别最大超过1 个数量级,主要是在被测位置模型飞行姿态不同造成的;在X 波段观测到的模型尾迹RCS长度比C 波段小得多.
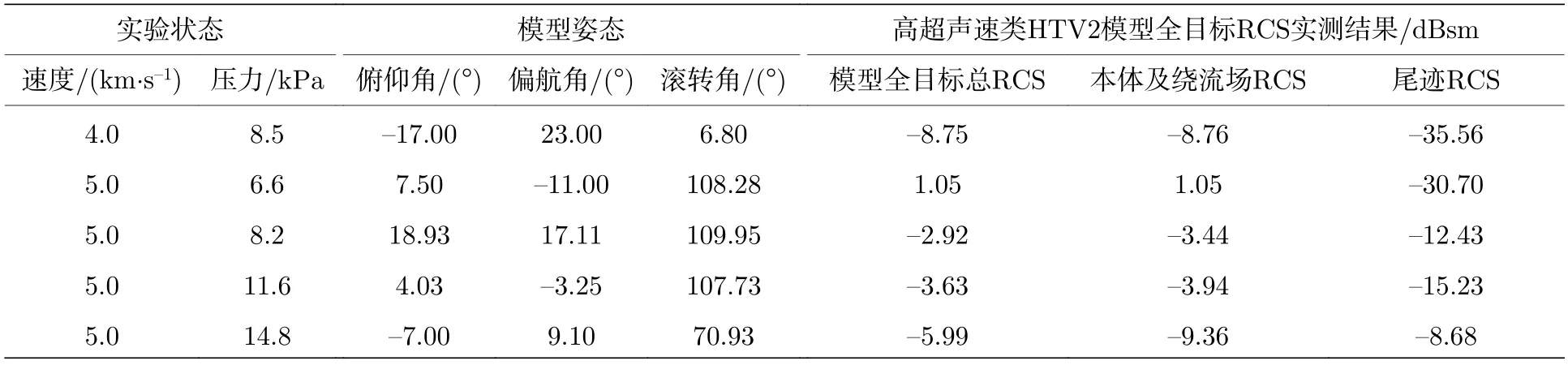
表3 高超声速类HTV2 模型X 波段全目标RCS 实验测量结果Table 3.Measurement results of the X band full target RCS of the simplified HTV2 models flying at hypervelocity.
4 高超声速类HTV2 模型RCS 测量弹道靶实验数值模拟
基于高超声速类HTV2 模型电磁散射特性弹道靶实验,建立相应的电磁模型,开展高超声速类HTV2 模型RCS 测量实验数值仿真与计算分析.数值计算的过程主要分为3 个部分:流场仿真、等离子体参数的分析、弹道靶模型不同姿态下入射电磁波角度的确定以及采用FDTD 计算模型的C 波段与X 波段单站RCS.
根据高超声速类HTV2 模型等离子体鞘套的空间分布特性,采用优化算法对三维模型进行剖分,并开展等离子体鞘套与模型空间坐标之间的参量变换[15−19].在模型外围非均匀等离子体鞘套流场中,形成时变等离子体鞘套的电磁网格.将电磁网格所在位置的流场数据转化为电磁仿真需要的等离子体频率ωp及碰撞频率υc,从而实现流场网格与电磁网格的耦合:
式中υe,s为电子与中性粒子的碰撞频率,单位为rad/s;nm为中性粒子数密度,单位为个/cm3;σe,i为组分i与电子的动能转移截面,是温度的函数,单位为m2.
研究等离子体电场本构关系的处理方法,形成适用于等离子体的时域电场本构关系.根据等离子体鞘套空间分布非均匀的特点,采用SO-FDTD 方法分析包覆等离子体目标的电磁散射特性[20−24],Drude 模型介电系数表示为
式中,pn为有理分式分子的多项式系数;qn为有理分式分母的多项式系数.
根据频域到时域的转换关系,频域本构关系式在时域可以表示为

将(12)式代入(11)式可以得到:
(13)式为时域中包含时间导数的本构关系.
引入在时域中的移位算子,经过严格的数学推导可以得到(13)式的时域离散形式:
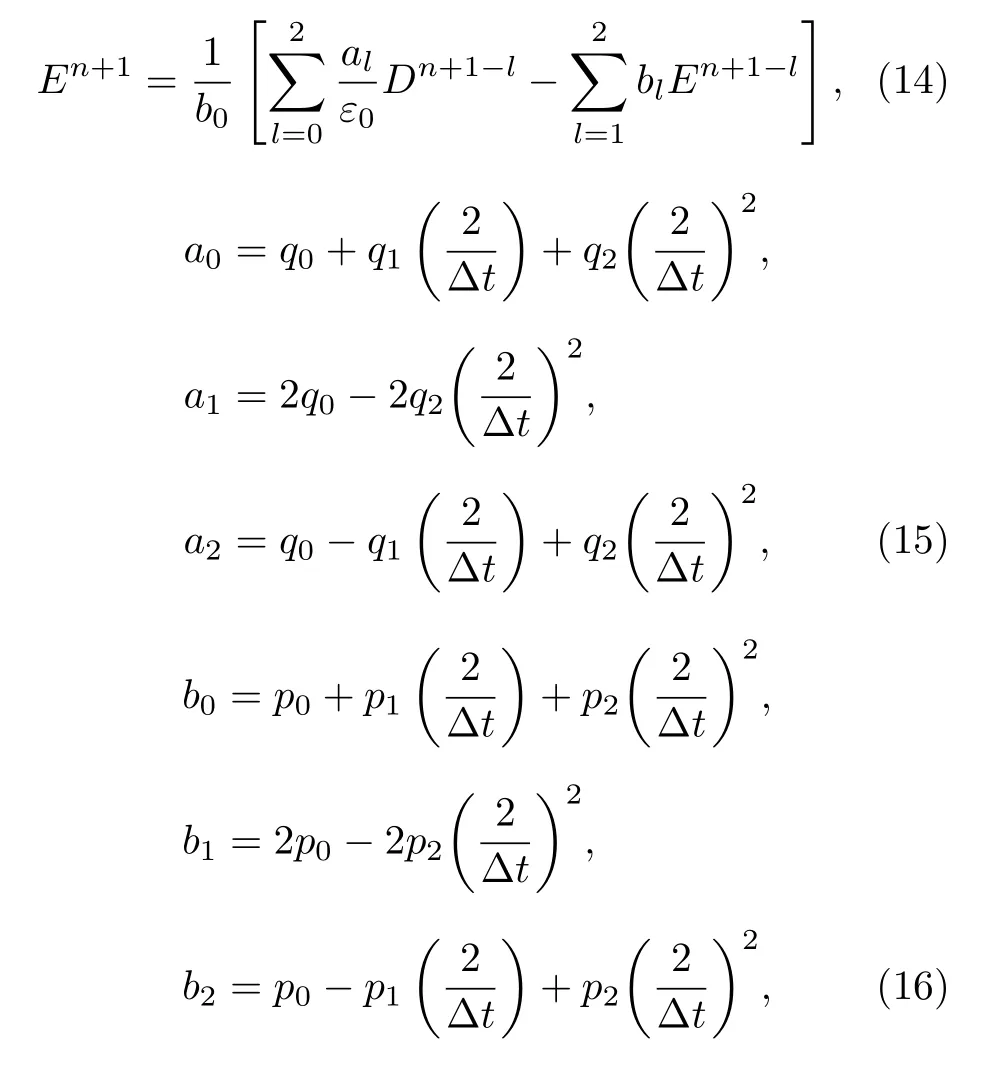
由此可以得到SO-FDTD 方法由D→E的迭代公式.磁场迭代公式与常规FDTD 方法一致.
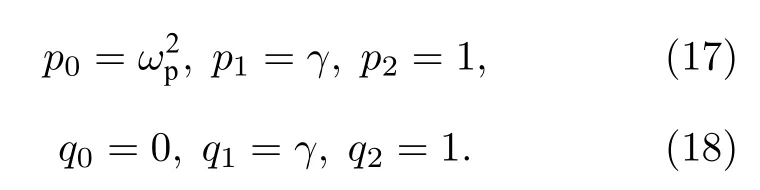
选择4 组高超声速类HTV-2 模型典型实验状态,将弹道靶实验测量结果和FDTD 数值计算结果进行对比分析,验证建模方法和计算结果的可靠性.在实验条件下,入射波的方向沿着模型头部侧方位入射,且入射波的方向与弹道轴线夹角为30°,计算模型及其等离子体鞘套的单站RCS,FDTD计算中的角度定义如图10 所示.模型姿态采用3 个姿态角描述:俯仰角、偏航角和滚转角.取最小波长的1/15 为FDTD 网格的剖分尺寸.
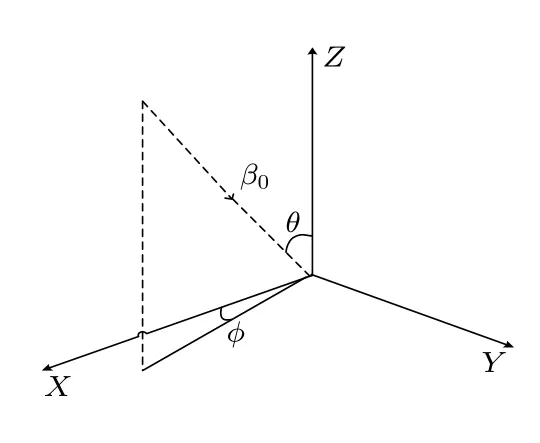
图10 FDTD 计算中的角度定义Fig.10.Image of angle definition in FDTD calculation.
基于弹道靶超高速类HTV2 模型流场仿真,与类HTV2 电磁模型耦合,在典型实验状态下,高超声速类HTV2 模型及其等离子体鞘套全目标RCS 的计算结果与弹道靶实验测量结果对比如表4所列.模型全目标RCS 典型计算结果如图11 和图12 所示.由表4 可见,弹道靶高超声速类HTV2模型及等离子体鞘套C 波段/X 波段RCS 数值计算结果和实验测量结果较为符合,计算结果与实验测量的最大误差为3.35 dB,属于合理的误差范围.实验测量和数值计算之间相互对照,印证了等离子体包覆模型电磁散射特性建模的合理性及其正确性.

图11 高超声速类HTV2 弹道靶模型及其等离子体鞘套X 波段的RCS 数值计算结果,虚线为类HTV2 本体RCSFig.11.Comparisons between numerical simulations and experiment results of the X band RCS of the simplified HTV2 models flying at hypervelocity and its plasma sheaths.The dashed line is the RCS of the simplified HTV2 models.

图12 高超声速类HTV2 弹道靶模型及其等离子体鞘套C 波段的RCS 数值计算结果Fig.12.Comparisons between numerical simulations and experiment results of the C band RCS of the simplified HTV2 models flying at hypervelocity and its plasma sheaths.The dashed line is the RCS of the simplified HTV2 models.

表4 高超声速类HTV2 模型不同波段RCS 的FDTD 方法数值模拟结果与弹道靶实验测量结果的对比Table 4.Various bands RCS comparisons between FDTD simulations and experiment results of the simplified HTV2 models flying at hypervelocity.
5 结论
1) 在给定的实验条件下,在不同实验状态下包覆等离子体鞘套的高超声速类HTV2 模型在同一测量波段的RCS 差别较大,最大相差超过1 个数量级;模型姿态角对包覆等离子体鞘套的高超声速类HTV2 模型RCS 影响较大,最大相差1 个多数量级;模型尾迹C 波段RCS 比模型本体RCS低1.5—2.5 个数量级,模型尾迹X 波段总RCS 显著增强.
2) 在给定的实验条件下,包覆等离子体鞘套的高超声速类HTV2 模型全目标C 波段电磁散射能量分布在模型及其绕流区域,X 波段电磁散射能量分布在模型及其绕流区域和等离子体尾迹区域;模型全目标电磁散射能量呈现多个散射中心,模型及绕流场区域出现1 个强散射中心,模型湍流尾迹出现多个散射中心.
3) 包覆等离子体鞘套的高超声速类HTV2 弹道靶模型C 波段/X 波段RCS 数值计算结果和实验测量结果均较为符合,计算结果与实验测量的最大误差为3.35 dB,验证了非均匀等离子体包覆目标的电磁散射特性建模方法的有效性.中国空气动力研究与发展中心超高速空气动力研究所陈鲲工程师负责模型设计,与中国空气动力研究与发展中心超高速空气动力研究所于哲峰研究员讨论了带有等离子体鞘套的模型全目标电磁散射建模方法,获益匪浅.中国空气动力研究与发展中心超高速空气动力研究所龙耀工程师、廖富强、李文光等在实验中提供了帮助.对上述各位同志的帮助一并表示感谢!
