基于探空数据分析低云对大气折射率结构常数的影响*
2022-04-27张坤罗涛王菲菲孙刚刘庆青春李学彬翁宁泉1朱文越1
张坤 罗涛 王菲菲 孙刚 刘庆 青春 李学彬 翁宁泉1) 朱文越1)†
1) (中国科学技术大学环境科学与光电技术学院,合肥 230026)
2) (中国科学院合肥物质科学研究院安徽光学精密机械研究所,中国科学院大气光学重点实验室,合肥 230031)
3) (中国科学技术大学研究生院科学岛分院,合肥 230026)
4) (先进激光技术安徽省实验室,合肥 230037)
本文基于实测的热力湍流探空数据,使用WR95 方法识别低云的垂直结构,对比分析了低云与晴空天气下大气折射率结构参数、气象条件和大气稳定度的平均统计结果.结果表明,低层薄云对 起伏变化的影响微乎甚微,仅仅表现出轻微增大的趋势,云底 相对于晴空天气平均增大1.6 倍,云顶之上最大程度增大2.5 倍.低层中厚云在云顶处 相对于晴空天气增大了3.80—6.61 倍,且云顶区域增大的幅度大于云底区域.云底区域大气湍流特性受到地面热力驱动与低云冷却的联合作用,沉降气流与地面向上气流发生了耦合,增强了风切变,在这一高度附近也出现了增强.综合对比晴空和有云天气大小可知,云对的增强效应大致在10–16 量级.一方面,风切变在云顶处或者云顶之上达到最大值;另一方面,因为云顶短波辐射增温和长波辐射冷却的共同作用,云顶之上会形成不同厚度的逆温层,致使云顶处位温变化率急剧增大,Brunt-Vaisala 频率 N2 值较晴空天气下增大了0.5—3.0 倍;而云底区域 N2 均小于晴空天气.由于云层多尺度活动引发的湍流效应,势必会引起对激光传输大气效应评估和订正的偏差.正确掌握不同相态云层及边界处湍流的变化规律,也可以为进一步建立云层周围大气湍流的变化规律模型奠定基础.
1 引言
云覆盖了地球约2/3 的面积,尤其是低云对地气系统的辐射收支起到重要作用[1].低云参与着多种尺度的物理过程,从10–3—103m 不等,例如天气和气候变化、夹卷混合过程[2].因为不同尺度活动间相互作用机制的复杂性,云在天气和气候变化中的作用仍然是不明确的[2−4].云在发展过程中,因为湍流夹卷(通过云顶和侧边界,云内外进行热量、动量、水分和质量的湍流交换)和动力夹卷(由于云内气流的加速上升.根据质量连续性的要求,四周空气必然会流入云中进行补偿),环境空气被不断地卷入并与之混合[4].云内湍流和夹卷混合不仅决定了云层的生命周期和形态结构[5],而且影响着云的微物理特性.当外部空气从云的侧边界[6,7]或云顶[8]、云底[9]被夹卷进入并渗透到云层内部,云滴蒸发和沉降相继发生以使卷入的干冷空气达到饱和平衡状态[9].因为稀释作用,云内水汽混合比、液态水含量、云滴浓度、云滴尺寸分布均会做出相应的变化,直接影响着云的动力和辐射特性[10,11].云顶长波辐射冷却、短波辐射增温、风切变均是产生湍流的机制,但是在不同时段的影响程度各不相同,尤其是早晚差异[12,13].
湍流诱导的夹卷混合会导致云层不稳定(梯度理查森数Ri≤1)[14],伴随着云内和边界强风切变、温度和湿度起伏,在云顶之上形成较为显著的逆温层[15,16].因夹卷混合引起的热力和动力变化直接影响着云周边几公里范围大气光学湍流[14].由于云顶辐射冷却、云底增温和大尺度风切变运动产生的大气湍流在大气中是一种很常见的现象[17,18].这种现象在Paluch和Baumgardner 的实验中发现过[19].
大气湍流是一种具有强烈涡旋性的大气不规则运动,时刻存在于大气层中.在自由空间光通信、激光雷达、光探测与测距、遥感和成像等实际应用中,大气湍流是重要的影响因素[20].光传输和激光探测中,如果光路中存在云层,云层周围大气密度、温度、流体速度等的起伏变化不仅会对成像和激光系统的性能造成影响[21,22],而且云层周围的湍流结构的变化规律对激光传输系统[23,24]和云的湍流建模都具有重要指导意义.但是,目前关于低云周围大气光学特性,尤其是针对大气光学湍流强度的报道较少.本文基于实测的热力探空数据识别低云的垂直结构,并从静力和动力两个方面分析低云周围大气湍流参数的起伏变化.
2 数据与方法
2.1 试验与数据
2017 年11 月—12 月,中国科学院安徽光学精密机械研究所在中国山东半岛(A 站点)和浙江东部(B 站点)两个滨海站点进行大气湍流探测联合试验.A,B 两站点在地理位置上具有南北(纬度)差异,大气背景也就存在不同.相比A 站点,B 站点的中下对流层(0—6 km,above ground level,AGL,下同)气温较高.试验期间,在没有特殊天气条件的情况下,每天早晚分别集中在07:30—08:00和19:30—20:00 两个时间段进行探空试验.A 站点共释放64 组探空气球,最终高度均在24 km 之上;B 站点共释放65 组,其中有5 组最终高度未达到20 km,但是不影响本文的研究内容.
基于北斗定位的TD2 型数字式电子探空仪搭载T,P,U 传感器测量温度、气压和湿度,风速与风向根据北斗定位计算得到,此外还搭载了安徽光机所研制的QHTP-2 型热力湍流探空仪[25].其中,TD2 型数字式电子探空仪的传感器参数如表1 所示.热力湍流探空仪利用自研的温度脉动仪进行湍流测量.温度脉动仪装有两个间距1 m 的铂丝探头(直径为15 µm),利用铂丝探头的线性电阻-温度特性,测量空间内两点间由于温度脉动起伏所引起的电压变化,继而得到两点之间的温度差.热力湍流探空仪频率响应范围为0.1—30.0 Hz,可测量的最小温度起伏标准差不大于0.002 ℃,垂直分辨率为10 m.
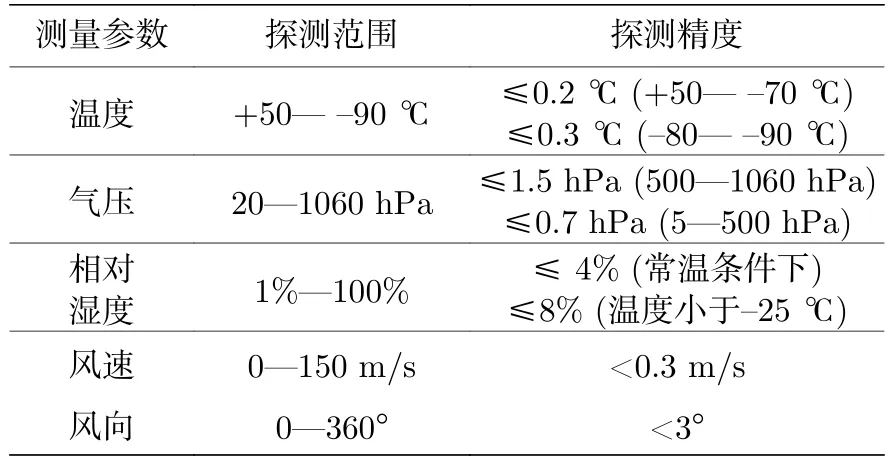
表1 TD2 型气象探空传感器参数Table 1.Sensor parameters of TD2 type meteorological radiosonde.
在惯性子区内,温度结构函数DT满足三分之二定律,因此,通过测量两点温差可以得到温度结构常数
其中T(x),T(x+r) 表示两端铂丝探头的温度;l0,L0分别表示内尺度和外尺度长度(单位为m).
2.2 云层垂直结构识别方法
云垂直结构(云低、云顶高度、云厚等参数)和相态变化与云辐射强迫作用息息相关[27],影响着地表能量收支[28].目前,基于探空数据识别云垂直结构的方法主要有三种,分别为设定温度露点差阈值法(Poore 法)[29]、计算温度和湿度随高度变化的二阶导数法[30]和相对湿度阈值法(WR95 法)[31].WR95 法是目前基于探空数据识别云垂直结构最成熟的方法,该方法改进了Poore 的方法,通过取相对湿度阈值(84%—87%)判断云层,其最大的优点在于能够连续地识别云层垂直结构.与毫米波云雷达实测数据进行对比结果表明,因为WR95 方法识别高云的能力较弱,二者的相关系数为0.81,但是中低云情况的相关系数会更高[32].另外,WR95 识别结果与CloudSat 实测云垂直结构的对比分析[33]也显示了WR95 方法对识别中低云具有较好的可靠性与准确性.在使用WR95 法时,需要注意根据云的相态来选择按照纯液面还是纯冰面计算相对湿度.当温度高于约–10 ℃时,云多表现为水云;当温度低于–40 ℃时,云多表现为冰云;而当温度介于–40 —–10 ℃时,混合相云(即同时存在云水和云冰)的发生概率较高[34,35].根据掩星探测资料的对比研究结果表明[36],若把混合相云当作纯液相会漏检测高云和多层云.如图1 所示,如果使用液面相对湿度将会漏检1.9 km 处的云.

图1 WR95 法 识别云 层垂直结 构示意图(2017 年11 月15 日07:40 在A 站点的探空数据),蓝色圆圈中即为厚度为20 m (小于30.5 m)的湿层Fig.1.Schematic diagram of WR95 method to identify the vertical structure of clouds (Radiosonde at Station A lunched at 07:40 on November 15,2017).The blue circle is the wet layer with a thickness of 20 m (less than 30.5 m).
因此,为提高识别精度,当温度低于–10 ℃时,需要按照冰面饱和水气压重新计算新的相对湿度(RH-ice):
其中f为重新计算得到的RH-ice;e表示水汽压;Es是指水汽达到饱和时的水汽压强.饱和水汽压Es大小与温度有直接关系.随着温度的升高,饱和水汽压显著增大.本文采用Goff-Gratch[37]公式计算温度为t时的饱和水汽压.
具体数据处理步骤为:1)按照上述公式,计算t<–10 ℃环境下,相对于冰相的湿度;2)识别相对湿度最小值大于84%,且最大值大于87%的云层;3)当相邻的两个云层之间的距离小于300 m时,视为一层云.
为进一步提高识别的可靠性,数据分析中对识别结果进行了进一步的筛选和分类.当识别的云层厚度小于30.5 m[29]或云底高度小于500 m[38]时,该层以湿层处理,不视为云层.同时,探空仪中的湿度传感器虽然容易受低温的影响而降低准确性,但不影响对流层中下部大气湿度的测量精度[39].因此,本文着重研究低云(云底高度低于2.5 km AGL)的情况.此外,当云层厚度大于2 km 时可能存在深对流云,对的影响机制较为复杂,本文研究中也暂不考虑.按照试验时间将数据分为早晨和晚上两组分别进行讨论.
基于WR95 方法对A,B 两站点低云垂直结构的识别结果如图2 所示,各类云层样本数量统计归纳于表2 中.表3 中记录了A,B 站点低云平均云底高度(cloud base height,CBH (HCB))、云顶高度(cloud top height,CTH (HCT))和云层厚度(∆H).两站点识别到低云的样本出现概率为23.21%(A 站点)和31.37%(B 站点).早晨不仅出现低云的概率低于晚上,而且云层厚度普遍薄于晚上组.

表2 2017 年11 月—12 月A,B 站点云垂直结构筛选结果(括号内表示“早晨组样本数量”+“晚上组样本数量”)Table 2.Recognition results of the cloud vertical structure at Station A and B from November to December,2017(“sample number in the morning group”+“sample number in the evening group”in parentheses).
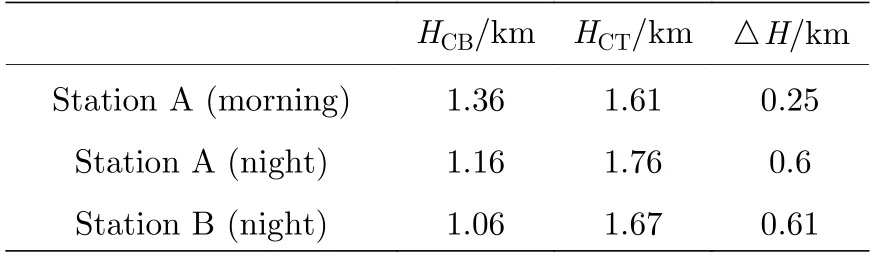
表3 A,B 站点云层垂直结构平均参数Table 3.Average parameters of cloud vertical structure at Station A and B.
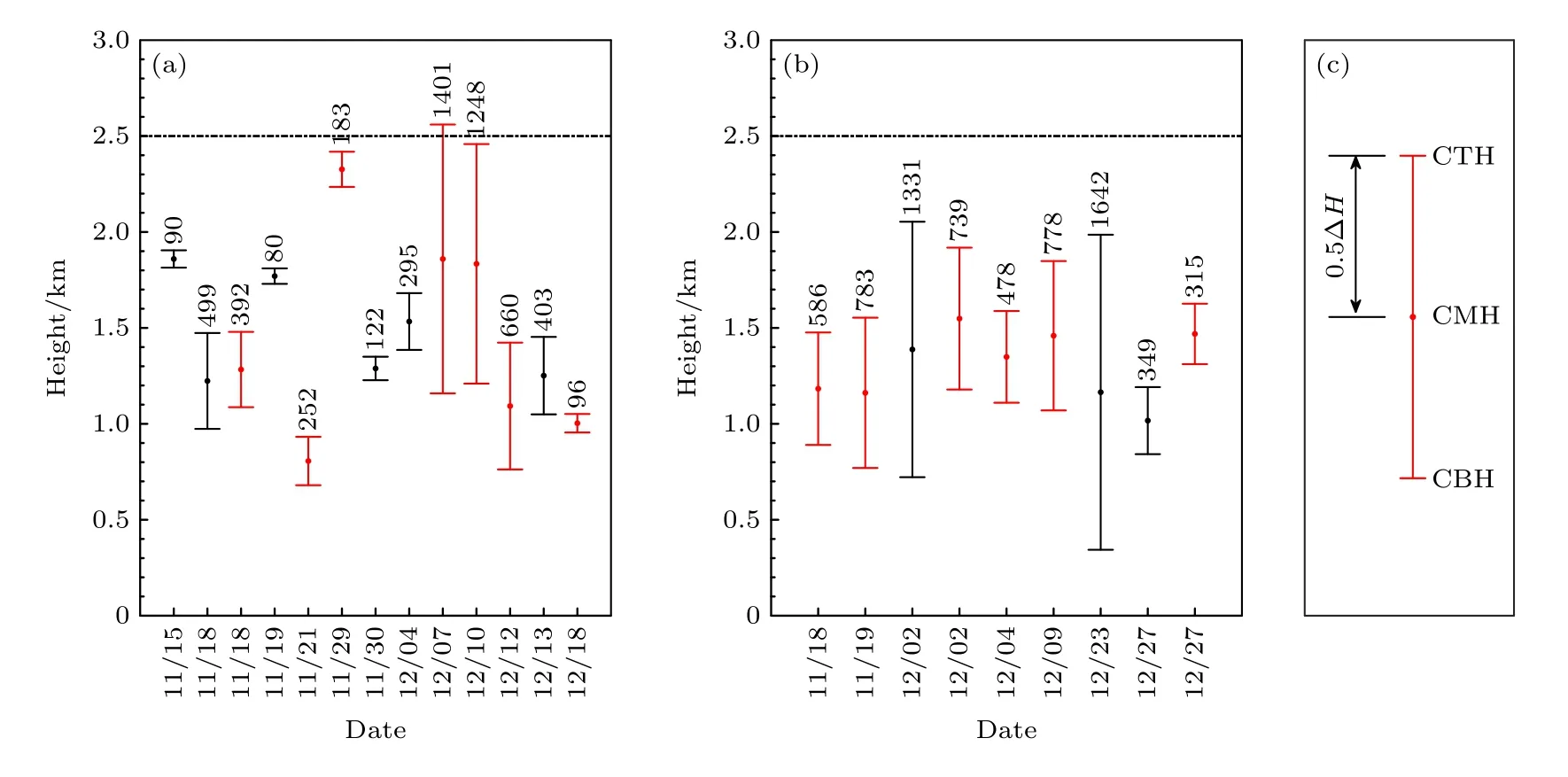
图2 WR95 法识别低云垂直结构结果,数字表示每个样本的云层厚度(单位为m) (a) A 站点;(b) B 站点,黑色和红色分别代表早晨和晚上组;(c) 云层归一化高度示意图,其中,云层厚度 ∆ H=HCT–HCB,“圆点”代表云中高度(cloud middle height,CMH(HCM)),HCM=(HCB+HCT)/2Fig.2.The WR95 method identifies the results of the vertical structure of low clouds,and the numbers indicate the thickness of the each cloud layer (unit:m):(a) Station A;(b) station B.Black and red represent the morning and evening groups,respectively;(c) schematic diagram of cloud normalized height.Where,cloud thickness ∆ H=HCT–HCB,and the dots represent the height of the cloud middle height (CMH(HCM)),HCM=(HCB+HCT)/2.
3 结果与分析
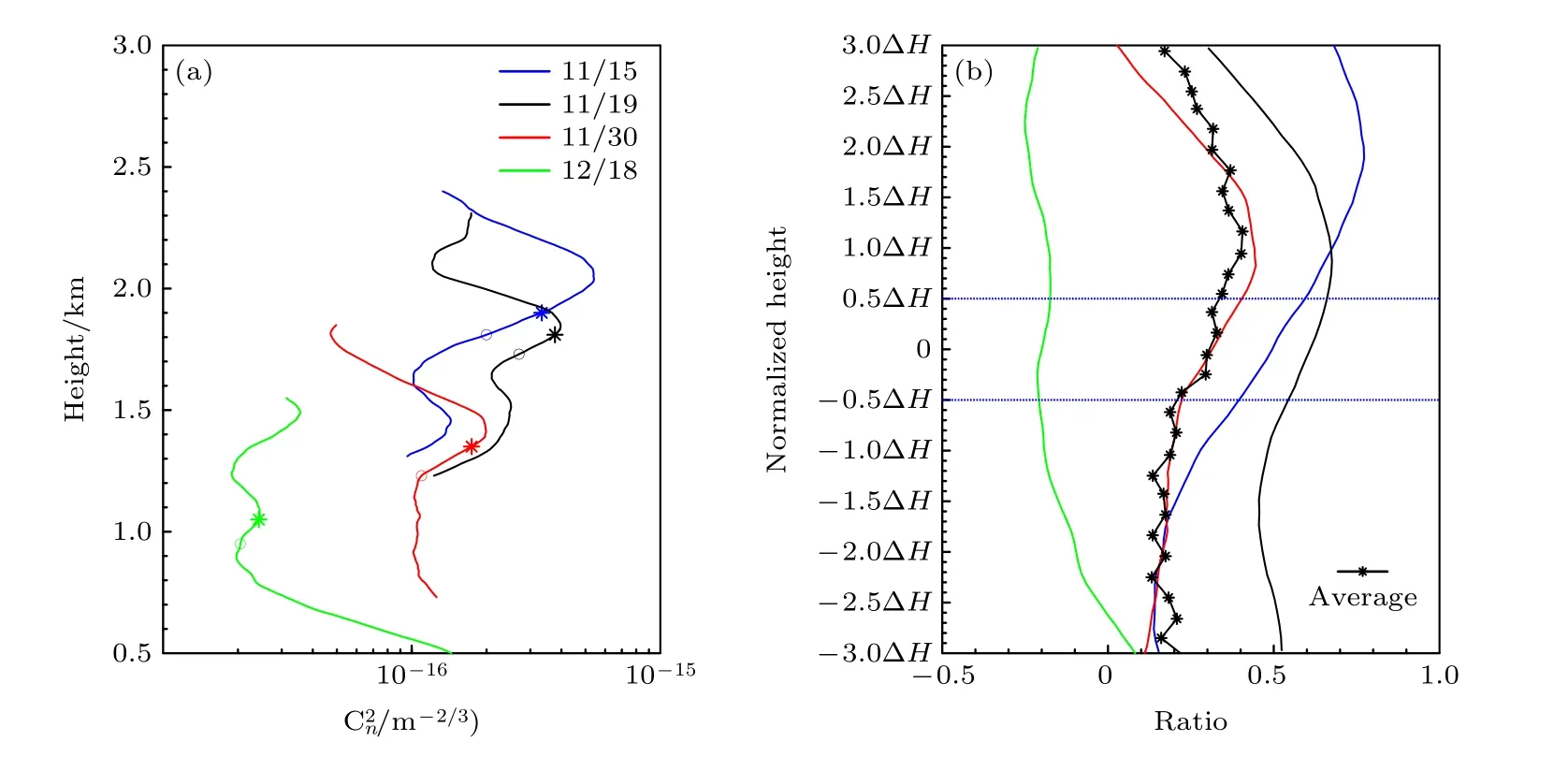
图3 A 站点薄云和晴空天气下 廓线对比 (a) 彩色实线分别表示四个薄云周围 廓线,线上的彩色圆圈和*分别表示相应云层的CBH,CTH;(b) 四个薄云样本 与同时段晴空天气平均廓线的比值Ratio.(注:Ratio=log10(),为样本(有云) ,为对照组(晴空)Fig.3.Contrast of profile under thin clouds and clear sky at Station A:(a) The colored solid lines indicate the profiles around the four thin clouds,the colored“o”and“*”on the lines indicate CBH and CTH of the corresponding clouds,respectively;(b) Ratio=log10() .is the of four thin clouds, is of the control group under clear sky.
图4 为A,B 站点有云(低层中厚云,下同)与晴空天气下的综合对比情况.图中黑/红线为所有云层高度归一化后的有云/晴空廓线的统计情况,同时段晴空廓线被称为晴空对照组(下同).因为B 站点早晨组的3 个样本分布较为离散,给定义参照高度的范围增加了难度,因此本文将不讨论B 站点早晨组的情况.当云层厚度大于1 km 时,–∆H以下会低于地面,因此图4(b)和图4(c)归一化高度的下界为–∆H.
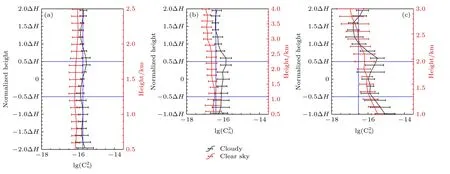
图4 有云与晴空天气下对比 (a) A 站点早晨组;(b) A 站点晚上组;(c) B 站点晚上组Fig.4. for clouds and for clear sky:(a) The morning group at Station A;(b) the evening group at Station A;(c) the evening group at Station B.
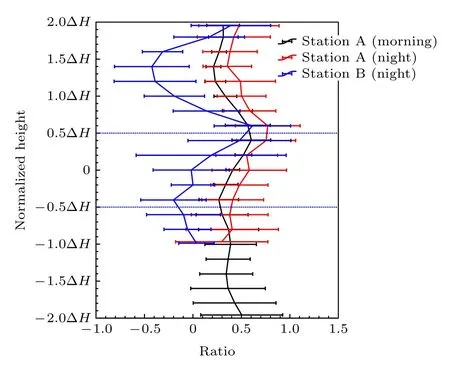
图5 A,B 站点中厚云层与晴空天气下 的比值Fig.5.The ratio of with medium-thick clouds to under clear sky.
1)气象条件对比分析
图6 展示了有云与晴空天气下气象条件对比.A 站点纬度位置相比B 站点更偏北,因此整体而言A 站点温度比B 站点低,这种热力因素的系统性差异导致A 站点的整体弱于B 站点.从11,12 月开始,随着冷空气的加强和南下,相对于B 站点,A 站点大风过程明显增多[40,41].A 站点早/晚组有云情况相比晴空情况风速增加、温度降低,云顶以下风速增加2—3 m/s、温度降低6—8 ℃.根据环流场和历史天气显示,可能为北方冷空气入侵;云顶温度处于–12 和–15 ℃之间(冰相或者混合相云).而B 站点有云和无云情况下风速和温度差异不明显,有云时温度甚至略高于晴空;云顶温度在5 ℃左右(水云).
A 站点早晨组云位置相比其他组较高(平均云底位置1.36 km)、厚度薄(平均厚度0.25 km 左右),云顶存在较强的逆温层,多对应层云情况.云基本在边界层顶以上,晴空和有云(除云影响以外)的廓线基本随高度变化不大;而A,B 站点晚上组云的宏观性质较为接近,云位置相对低(平均云底位置1.0—1.1 km)、厚度大(平均厚度0.6 km左右),多对应浅对流云情况,云顶大致在边界层顶位置,可以发现晴空和有云(除云影响以外)的廓线基本随高度递减,其中B 站点由于地表温度较高,底层湍流较强,随高度递减的趋势更为明显.
2)大气稳定度分析
图7 给出了有云和晴空情况下动力(风切变Shear)、热力(位温θ、Brunt-Vaisala 频率N2)因素对比结果.大气湍流的能量主要来源于动力和热力作用.前者是指在有风向风速切变时,湍流切应力对空气微团做功;后者是指在不稳定条大气中,浮力对垂直运动的空气微团做功,使湍流增强.
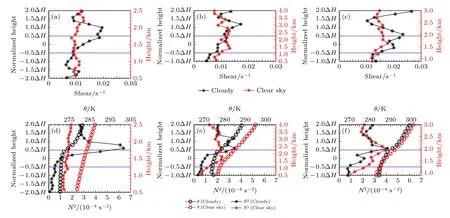
图7 A,B 站点有云与晴空天气下动力(风切变)和热力特征(Brunt-Vaisala 频率和位温)对比 (a),(d) A 站点早晨组;(b),(e) A站点晚上组;(c),(f) B 站点晚上组Fig.7.Comparison of dynamic (wind shear) and thermal characteristics (Brunt-Vaisala frequency and potential temperature) with clouds and clear sky:(a),(d) The morning group at Station A;(b),(e) the evening group at Station A;(c),(f) the evening group at Station B.
在云顶附近,A,B 站点有云时风切变相比晴空均出现了增强.其中,A 站点早、晚两组中,晴空对照组的风切变(红线)在整个对照高度上基本维持在(0.01 ± 0.003) s–1左右,尤其是早晨对照组的风切变基本上保持在定值(0.01 s–1).当存在低云时,–∆H之上风切变呈现逐渐增大的趋势,其中早晨组在+0.5 ∆H处达到极大值,增大了0.012 s–1,这种强切变保持了约0.5 ∆H,随后迅速减小;类似地,A 站点晚上组在–∆H—+1.2 ∆H区间内表现出增大的趋势,增大了0.013 s–1,随即迅速减小;B 站点在云顶(+0.5 ∆H)处同样出现了最大值.而在云中上部到1.0 ∆H—1.5 ∆H附近,A 站点早、晚均出现了远强于晴空的强逆温层,N2达到4× 10–4—6 × 10–4s–2;B 的云顶位置接近于晴空情况时的边界层盖顶逆温层的位置,因此逆温层强度相与晴空时差不多,N2达到4 × 10–4s–2左右.云顶的辐射冷却和蒸发冷却是产生逆温层的有利条件[42,43],云顶发射热红外辐射产生的湍流混合会加剧夹卷率[44],同时云顶强逆温也会抑制气流的上升,而向水平方向传输,从而增强云顶风切变.云顶或云顶之上由于天气系统或云顶形成的强风切变也会诱发强湍流和夹卷更多潮湿的空气从云顶或者边界进入到云层内部,同时也会使得云底的感热和潜热以强湍流为载体传输到云顶,以补偿云顶的辐射冷却和蒸发冷却[45,46].
在云底以下,A,B 两地有低云存在时的风速切变均小于或与晴空时的风切变相当,其中A 站早、晚组有低云存在时(黑线),云底–0.5 ∆H到–∆H附近的风切变均弱于晴空对照组,在–∆H处二者的差值最大,对照组约是有云天气下的2 倍,而B 站点云底之下有云和晴空的风切变大小相当.低云云底与地面之间的区域中,大气湍流特性受到地面热力驱动与低云冷却的联合作用,在–∆H到–1.5 ∆H附近沉降气流与地面向上气流发生了耦合,增强了风切变,在这一高度附近也出现了增强.云底区域的静力不稳定性相比晴空天气出现了大幅增强,即具有较小值的N2,最小可达6 × 10–5s–2.
4 结论
云在发展过程中,上升气流不断地在边界与周围的干空气夹卷混合.在湍流混合和动力夹卷的共同作用下,云内外进行了热量、动量等湍流交换.夹卷混合的固有属性,改变了云层周围环境的大气动力、热力特性,进而不同程度地影响云内及云层上下一段距离的.本文基于湍流探空数据,采用WR95 法识别云层的垂直结构,通过对比有云和晴空的情况,分析了低云附近大气湍流参数的变化特征.与晴空天气相比,薄云(云厚度 <150 m)由于本身夹卷程度较弱,因此对周围大气环境的影响很小.而中厚度(数百米至1 km 左右)的低云能影响和增强云顶以上0.5 ∆H范围内、云底1∆H范围内的,增强效应大致在10–16量级.云顶区域湍流强度增强是风切变和云顶夹卷过程的共同作用,云底以下则主要是热力驱动与低云冷却的联合作用.根据混合和蒸发时间尺度的大小,强湍流和弱湍流背景下分别对应着均匀夹卷和极端非均匀夹卷过程[47].云对湍流强度的增强效应多发生在非均匀夹卷混合机制中,如A 站点;而B 站点晚上组偏向于均匀混合,增强效应较弱.
诸如辐射冷却、蒸发冷却、风切变之类的云边界小尺度活动和云相态是影响夹卷混合速率的重要参数[48].小尺度活动的并发行,共同控制着云顶不稳定性.云与自由大气最大的区别就是由这些小尺度活动引起的对流不稳定,即产生大气湍流的有利条件.其中,辐射冷却是产生湍流的主要机制之一,其他现象可以与之联合作用.长波辐射冷却对夹卷率的直接影响表现在云体温度急剧下降,有利于逆温层的形成,使云层处于不稳定状态.尽管辐射和蒸发冷却是产生湍流的主导因素,但是它们容易受到云顶其他活动的影响,例如风切变.上升气流会被逆温层偏转到水平方向上,导致风切变增大.强风切变引起的湍流混合作用,一方面会从云顶或者侧边界卷入外部干空气;另一方面会从云底向上传输潜热和感热以补偿云顶辐射冷却[45],从而造成云底的静力不稳定性.另外,风切变会正反馈于夹卷混合.
双点温度脉动仪在云中测量时,可能会存在小的测量误差,因此文中着重分析了云底和云顶区域的情况.其中,温度脉动仪的铂丝在云底区域还没受到云层高湿度的影响,结果较为可靠;当温度脉动仪穿过并离开云层,进入未饱和大气中时,因为挥发性,粘附在铂丝上的水汽很快挥发.本文仅仅是从趋势变化上,提到了云中的起伏变化,但没有过多的分析与讨论.温度脉动仪旨在测量双点温差,双探头受到同样的影响时,温差的测量误差会更小.即使是铂丝探头粘附了水,降低传感器的灵敏度,这样造成的不良影响是测量不到弱湍流的情况,但是,实际情况上,云层内部及附近的湍流强度较强.图4 中有云与晴空天气下对比显示,有云情况下的标准差与晴空天气下大小相当,并没有出现云中较大起伏的现象.在文献调研中,并未发现云层对温度传感器测量误差的影响的相关研究,下一步计划开展相应的研究.另外,A,B 站点低云分别对应混合相云和低云,不同相态的云具有不同的吸收和散射特性;且两站点有云时大气折射率结构常数、气象条件以及大气稳定度表现出不同的量化特征.两站点低云的相态对这种差异性的贡献率还有待于进一步的研究.
大气湍流作为一种具有强烈涡旋性的运动,是影响激光传输效果的主要因素之一,也是诸如成像型激光探测之类的激光工程的主要限制因素.由于自然界云的多发性,激光光路上或光路周围不可避免的会存在云层的情况,如果忽略云层多尺度活动引发的湍流效应,势必会引起对激光传输大气效应评估和订正的偏差.本文的研究可以为进一步建立云层周围大气湍流的变化规律模型奠定基础.
