基于新型磁流变阻尼器的汽车防侧翻研究*
2022-04-27刘志恩安宏杰宋伟志李永超
刘志恩 安宏杰 宋伟志 李永超
(武汉理工大学,武汉 430070)
主题词:磁流变阻尼器 防侧翻 CarSim/Simulink联合仿真 PID
1 前言
磁流变液(Magneto Rheological Fluid,MRF)作为一种智能材料,可以通过控制磁场强度改变屈服剪切应力,从而改变流变特性,因其稳定性高、响应速度快而得到了广泛研究及应用。MRF力学模型主要有非线性滞回双黏性模型、Bouc-Wen模型、Sigmoid模型以及Bingham粘塑性模型等。Carson 等人提出了一种磁流变(Magneto Rheological,MR)阻尼器,用于车辆悬架系统的振动控制,并应用了天棚控制,验证了阻尼器及控制器的有效性。Choi 等人提出了一种新的控制器,通过MR 阻尼器改善了车辆的行驶振动控制性能。Choi 和Sung 等人及其他学者对MR阻尼器进行了大量研究,但该阻尼器中的MRF 仅通过有磁场作用的主孔,这使得阻尼器在活塞速度较低的范围内阻尼力随速度变化的斜率较大,降低了车身在低速条件下的运动平稳性。Sohn等人提出了一种带有旁通孔的MR 阻尼器,并研究了活塞旁通孔数量、孔径、线圈高度等几何参数对MR 阻尼特性的影响。Park 等人提出了一种带有小孔的MR阻尼器,并通过1/4 车辆模型评价其舒适性。Oh Jong Seok 等人根据车辆质量分布,将带旁通孔和不带旁通孔的阻尼器分别用作前、后阻尼器,并验证了搭载2种不同的MR 阻尼器的乘用车及客车的振动控制性能。上述研究中的MR 阻尼器只有开孔和不开孔2 种,且只通过电流对阻尼力进行控制,未涉及对阻尼器小孔控制策略的研究,且对车辆防侧翻的研究极少。
本文针对这些问题提出一种新型MR阻尼器,基于水头损失理论及Bingham模型研究其阻尼力特性,并将其应用于车辆模型进行仿真分析。为验证装备新型MR阻尼器的半主动悬架对于车辆防侧翻的有效性,设计PID 控制器,并通过CarSim 建立B 级Hatchback 模型与Simulink 进行联合仿真,根据不同工况控制内、外侧新型MR 阻尼器,产生防侧翻力矩以减小侧倾角,提高车辆的操纵稳定性。
2 新型MR阻尼器结构及阻尼力计算
2.1 新型MR阻尼器结构
本文提出的MR阻尼器结构如图1所示。其中活塞主体中有主流道和4 个两两相隔90°的旁通孔,挡流板结构如图2 所示,挡流板等分为4 个瓣,每瓣有不同孔数。工作中根据具体路面情况及车辆行驶情况,打开或关闭不同数量的阻尼孔,以实现阻尼控制,提高车辆行驶的舒适性及操纵稳定性。
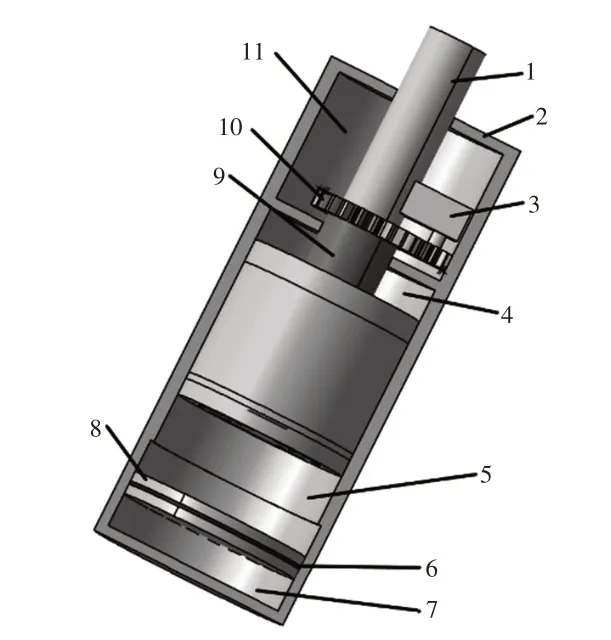
图1 新型磁流变阻尼器

图2 挡流板结构
2.2 新型MR阻尼器阻尼力分析
Bingham 模型精度较高,形式简单,因而本文采用该模型。Bingham模型假定磁流变液只有在剪切应力达到屈服应力后才开始流动,从而有效地模拟MRF 的性质。MR阻尼器中有上、下2个腔室,磁流变液通过主流道和旁通孔在2个腔室中流动,假设磁流变液不可压缩,且压力分布均匀,则MR阻尼器的阻尼力可以表示为:


式(1)的第1项为蓄能器的弹性恢复力,可以表示为:

式中,为活塞杆部的截面积;、分别为蓄能器中的初始压力和体积;为气体的顺应性参数;为比热比。
式(1)中的第2 项为MRF 的粘性阻尼力,其计算分为2 种情况,一种是无旁通孔打开时的情况,另一种是有旁通孔打开时的情况。当无旁通孔打开时,MRF 粘性阻尼力表示为:

式中,为活塞体的截面积;Δ=为活塞上、下腔的压力差;为磁流变液密度;为MRF粘性阻尼力引起的水头损失。
当MRF 在主流道和间隙内流动时,由于主流道的半径大于间隙的半径,所以可将磁流变液的环形管道流动假定为磁流变液在2个平行板之间的管道流动,因此管道流动水头损失可以表示为:

式中,、、分别为主流道的摩擦因数、直径和长度;为MRF在主流道中的流速;为MRF的粘度常数。
主流道直径可以表示为:

式中,为主流道间隙;为等效平行板宽度。
根据穿过主流道的MRF流量和活塞运动的关系可得:

式中,为主流道的流通面积。
将式(4)~式(6)代入式(3)可得MRF主流道的粘性阻尼力为:

当有旁通孔打开时,活塞的上下运动使磁流变液通过主流道和旁通孔从一个腔室进入另一个腔室,相比于励磁线圈,旁通孔更靠近非磁性圆柱体的中心,故励磁线圈产生的磁场对旁通孔的影响非常小,因此磁场主要作用于主流道,所以有旁通孔打开时,磁流变液粘性阻尼力的表达式与无旁通孔打开时的表达式不同。当有旁通孔打开时,MRF流过旁通孔的水头损失表示为:

式中,、、分别为旁通孔的摩擦因数、长度和直径;为MRF流过旁通孔的速度。
旁通孔与主流道的入口和出口相同,故可得旁通孔的流动水头损失=。根据通过主流道和旁通孔的磁流变液流量与活塞运动的关系可得:
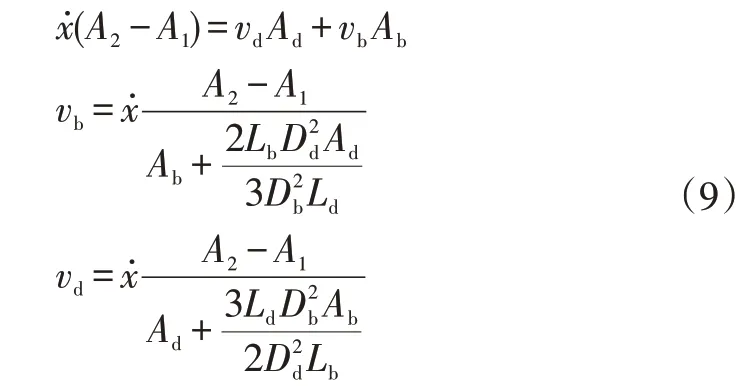
根据式(3)、式(8)、式(9)可得主流道的MRF 粘性阻尼力为:

从式(7)和式(10)可以发现,有旁通孔打开时的主流道磁流变液粘性阻尼力较没有旁通孔打开时小。当向励磁线圈通电且活塞运动速度较低时,MRF 很难从主流道流过,所以此时旁通孔的MRF 粘性阻尼力可以表示为:

式(1)的第3项为MRF的磁性力。由于在磁场的作用下,MRF中磁性颗粒因磁感应使磁性增强,磁性颗粒之间相互作用,从而由液体变为粘塑体,表现出类似固体的力学性质。本文采用Bingham模型,屈服剪切应力()和磁通密度的表达式分别为:

式中,~为屈服剪切应力拟合系数;~为磁通密度拟合系数;为电流。
基于Bingham模型可以得到MRF的磁性力:

因此,当无旁通孔打开时,MR 阻尼器的总阻尼力为:

打开旁通孔,并向励磁线圈通电,当阻尼器的活塞速度较低时,磁流变液从旁通孔通过,当活塞运动速度较高时,旁通孔的粘性阻尼力大于主流道的粘性阻尼力与磁性力之和,则磁流变液从主流道通过。因此,有旁通孔打开时,阻尼器的总阻尼力为:

本文新型MR阻尼器参数如表1所示。
在此过程中,技术要点如下:(1)对电力系统的调峰能力进行科学合理的分析;(2)对系统的调频能力进行科学合理的分析;(3)对电力系统传输能力进行分析;(4)将消纳能力作为目标,对电力系统进行科学合理的规划。

表1 MR阻尼器参数
根据表1 中的参数可得无旁通孔打开时的阻尼力如图3所示。

图3 无旁通孔打开时阻尼力
1 个、2 个、4 个旁通孔打开时的阻尼力如图4~图6所示。
由图4~图6 可得,在相同电流下打开旁通孔可以使阻尼器的阻尼力减小,打开0 个、1 个、2 个、4 个旁通孔时其最大阻尼力分别为5 010 N、4 951 N、4 894 N、4 791 N。当电流为0 A 时阻尼器的阻尼力斜率分别为2181.8N∙s/m、2142.3N∙s/m、2103.8N∙s/m、2034.8N∙s/m,这是由于旁通孔打开使阻尼器内磁流变液流速增加,减小了阻尼力斜率,从而限制了其最大阻尼力的变化。当活塞低速运动时,打开旁通孔对阻尼力的影响尤为明显,当电流为3 A、活塞速度为0.06 m/s(低速运动)时,打开0个、1个、2个、4个旁通孔其阻尼力分别为1 869 N、1 867 N、1 422 N、735.1 N,阻尼力最大差值为1 133.9 N,可以产生较大的防侧翻力矩,防止车辆在过弯时发生侧翻。

图4 旁通孔打开1个时的阻尼力

图5 旁通孔打开2个时的阻尼力

图6 旁通孔打开4个时的阻尼力
3 CarSim/Simulink联合仿真模型
3.1 CarSim整车模型搭建
本次仿真选择CarSim中的B级掀背式汽车(Hatch⁃back)模型,其参数如表2所示。

表2 车辆模型部分参数
动力系统选择最大功率为125 kW的内燃机,6挡自动变速器,悬架系统选择B级车弹簧、阻尼器及悬架。
3.2 CarSim 转弯及鱼钩仿真工况设置
转弯工况中设置车辆分别以70 km/h、80 km/h、90 km/h 匀速行驶,经过50 m 直行车道后,通过半径为80 m的70°弯道,再直行50 m。
鱼钩试验的要求为:汽车初速度为56~80 km/h,转向盘以720°/s 的角速度进行左转(转向角为-270°),然后再以原角速度进行右转(转向角为540°),初速度从56 km/h 开始,每次增加8 km/h,直到内侧轮胎离地2 英寸(50.8 mm),或车速达到80 km/h则试验结束。
3.3 CarSim/Simulink联合仿真模型
本文的研究对象是整车的侧倾角,所以设计PID控制器,以减小车辆在转弯和鱼钩工况的侧倾角。PID控制的控制规律为:

式中,K、K、K分别为比例系数、积分系数、微分系数;()为输入;()为控制输出。
在Simulink 中建立PID 控制器,与CarSim 进行联合仿真,验证新型磁流变阻尼器在车辆转弯工况及鱼钩工况中防侧翻的有效性,其联合仿真模型如图7所示。

图7 CarSim与Simulink联合仿真模型
4 结果分析
转弯工况仿真结果如图8 所示。由图8 可知:车速为70 km/h 时,装备新型MR 阻尼器的B 级车最大侧倾角从2.29°减小至1.85°,减小19.21%;车速为80 km/h时,最大侧倾角从3.05°减小至2.46°,减小19.34%;车速为90 km/h 时,最大侧倾角从3.53°减小至2.72°,减小22.95%。可见,该阻尼器取得了非常好的防侧翻效果。

图8 不同车速下侧倾角随时间的变化结果
鱼钩试验侧倾角曲线如图9 所示。由图9 可得:车速为56 km/h时,左转过程中最大侧倾角从3.54°减小至2.34°,右转过程中最大侧倾角从3.68°减小至2.6°;车速为80 km/h 时,左转过程中最大侧倾角从3.56°减小至2.43°,右转过程中最大侧倾角从3.69°减小至2.65°。


图9 不同车速下侧倾角随时间变化曲线
轮胎垂直位移如图10、图11 所示:车速为56 km/h时,轮胎最大垂直位移从42.84 mm减小至21.83 mm,减小49.04%;车速为80 km/h 时,轮胎最大垂直位移从42.94 mm减小至20.89 mm,减小51.35%。可见,该阻尼器取得了非常好的防侧翻效果。

图10 56 km/h车速下不同车辆的轮胎垂直位移


图11 80 km/h车速下不同车辆的轮胎垂直位移
5 结束语
本文提出了一种新型MR阻尼器,并在其基础上增加了旁通孔控制结构,在假设其磁流变液不可压缩,且在同一腔室内压力均匀分布的基础上,采用Bingham模型对其蓄能器弹性力、磁流变液粘性力以及磁流变液受磁场强度控制的阻尼力进行了分析及仿真计算。为验证新型MR阻尼器对于防侧翻的有效性,在CarSim中建立了车辆模型,并在Simulink 中设计了一种PID 控制器,与其进行联合仿真。仿真结果表明,装备新型MR阻尼器的半主动悬架在急转工况中可以使车辆侧倾角减小接近20%,在鱼钩试验工况中也可以降低车辆侧倾角,使轮胎最大垂直位移减小50%左右,取得了非常好的防侧翻效果。