基于逾渗理论的无人机网络覆盖性能的研究*
2022-04-27丁海霞曾振东邓嘉明
丁海霞,曾振东,邓嘉明
(1.江苏食品药品职业技术学院,江苏 淮安 223003;2.广东青年职业学院,广州 510507;3.嘉应学院信息网络中心,广东 梅州 514015)
0 引言
无人机网络具有易部署、配置灵活、视距通信概率高等优点,能够为现有的通信网络提供补充覆盖。此外,无人机网络也能在极端通信环境下扮演临时基站或者空中中继的作用。通常,无人机网络由多个无人机(Unmanned Aerial Vehicular,UAV)构成。大型的无人机网络可能由上千个UAVs 组成。
由于UAV 是移动的,无人机网络具有移动自组织网络(Mobile Ad hoc Network,MANET)特性。与MANET 不同,无人机是在空中移动,而MANET中的节点是在陆地上移动。无人机在空中移动速度最高可达100 miles/h。此外,与传统的MANET 不同,由于无人机是在三维空间中移动,无人机网络的网络结构更为复杂。
部署无人机网络的目的在于特定区域提供通信服务。为此,需要保证在这些特定区域内实现不间断的连续网络覆盖。因此,估计实现网络覆盖的临界节点密度(critical node density,CND)是一项有意义的工作。如果节点密度大于CND,则可以保证网络覆盖。此外,最小化CND 进而减少成本也是一项有意义的工作。
因此,实现无人机网络的覆盖是一项优化工作。由于无人机是三维的随机网络,构建此网络优化问题闭合形式的解是非常困难的。对于不同无人机所形成的不同覆盖区域的异构网络,它的优化问题变得更为复杂。此外,不同的无人机海拔高度也不尽相同。这就使得无人机网络呈现同构网络的异构特性。对于如此复杂的网络,寻找优化问题的解是一项挑战工作。
为此,提出基于逾渗理论无人机网络的覆盖性能分析策略,进而估计实现区域覆盖的CND。主要工作如下:1)对逾渗理论的吉尔伯特磁盘模式(gilbert disk model,GDM)进行修改,并利用修改后的GDM 模型,推导CND。2)通过仿真分析本文工作的准确性。由于无人机是移动的,引用综合移动模型(Comprehensive Mobility Model,CMM)建立节点的三维移动模型。
1 系统模型
1.1 无人机模型
假定系统内有m 个无人机,令υ表示第i 个无人机,i=1,2,…,m。每个无人机具有相应的通信半径和在地面上的覆盖范围,如图1 所示。令r表示υ的通信半径;令R表示υ在地面的覆盖半径。将覆盖区域中心(简称覆心)表示为O。(x,y,z)表示υ的位置坐标。覆心c是在二维平面,它的位置坐标可表示为(x,y,0)。
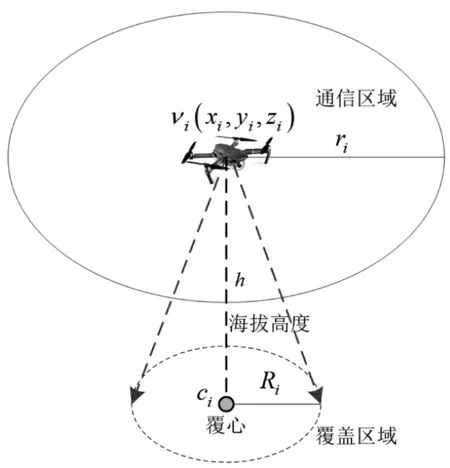
图1 无人机通信及覆盖模型
在理想环境,m 个无人机的覆盖半径相同,即R=R,其中,i=1,2,…,m。此外,实现监测区域的不间断的连续覆盖是部署无人机网络的基本要求。这就要求所有无人机(节点)的覆盖区域重叠,不能有任何空隙。在这种情况下,就需要针对特定的区域,估计实现覆盖的节点密度,即CND。为此,本文利用逾渗理论估计覆盖网络的CND。
1.2 基于正六边形和正方形的覆盖区域
图1 是将节点的覆盖区域看成圆形处理。但是在实际环境中,节点的覆盖区域并非呈现圆形。为此,本文将覆盖区域进行正六边形和正方形进行处理,并研究在这两种覆盖区域条件下的两个无人机覆盖区域产生临界重叠的条件。
图2 给出了正六边形的覆盖区域下的临界重叠图。图中两个无人机υ,υ的覆心分别为c,c。六边形的边长为σ。当边长σ 与覆盖半径R 相等,即σ=R,υ,υ可发生临界重叠(两个正六边形的一边重叠)时,则它们的覆心间距离为:

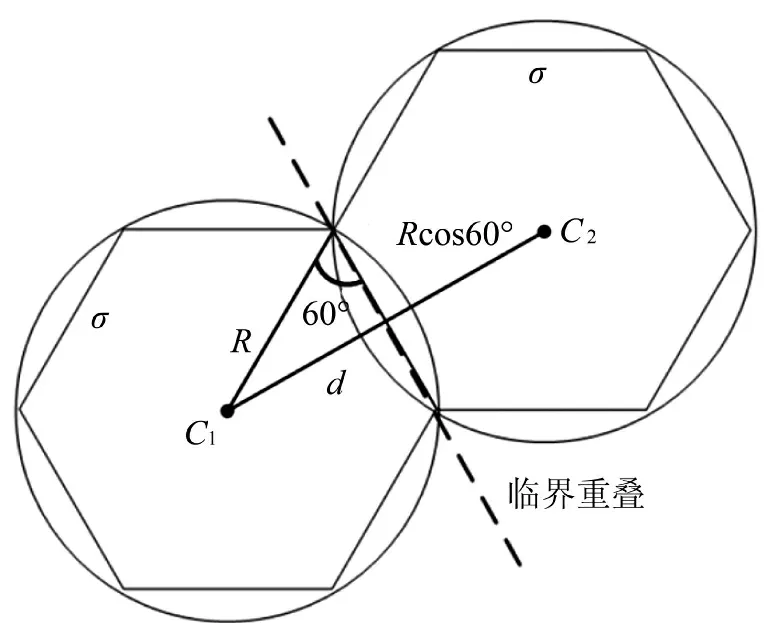
图2 基于正六边形覆盖区域的临界重叠示意图

在临界重叠时,两个覆心间距离:
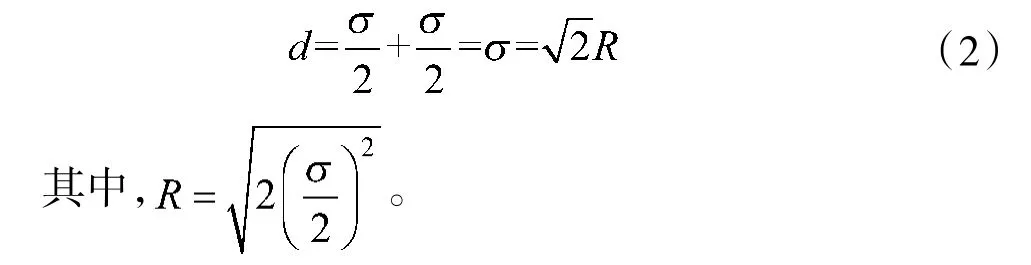
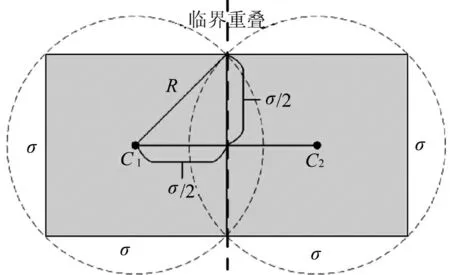
图3 基于正方形覆盖区域的临界重叠示意图

2 基于逾渗理论的临界节点密度
接下来,针对六边形棋盘(Hexagonal Tessellation,HT)和正方形棋盘(Square Tessellation,ST),并结合逾渗理论,推导CND。
2.1 基于HT 逾渗理论的CND
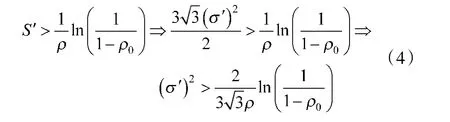
令ρ 表示泊松点过程的节点密度。在HT 模型下可以逾渗的条件为:
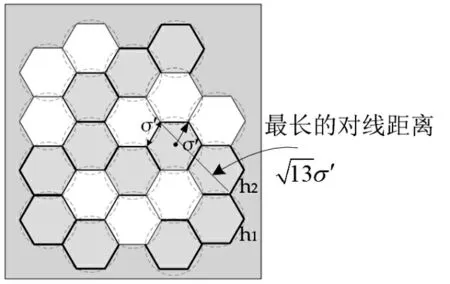
图4 基于六边形棋盘网格

对式(3)进行转换可得:
接下来,分析采用正六边形覆盖区域和正方形覆盖区域两种情况下实现连续、不间断覆盖的条件。
2.1.1 正六边形覆盖区域

将式(4)代入式(5)可得:

2.1.2 正方形覆盖区域

将式(4)代入式(7)可得:

式(6)和式(8)给出实现临界覆盖的节点密度值。依据文献[9],ρ取0.7,则在六边形棋盘模型下,节点密度值分别为:

2.2 基于ST 逾渗理论的CND
本节分析基于正方形棋盘的监测区域网格化条件下的临界节点密度值。图5 给出基于正方形棋盘的监测区域网格化的示例。图中的黑色实心圆点表示覆心。
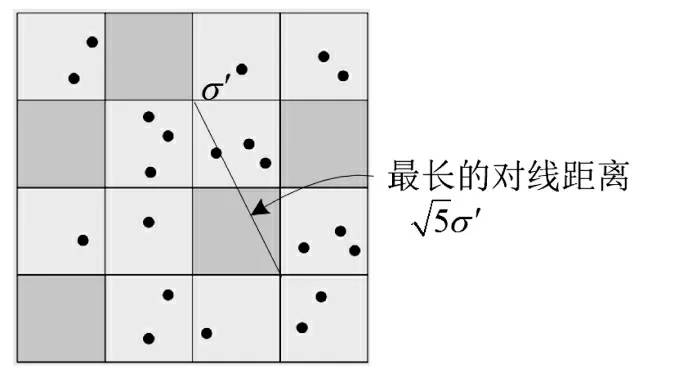
图5 基于正方形棋盘网格

接下来,分析采用正六边形覆盖区域和正方形覆盖区域两种情况下实现连续、不间断覆盖的条件。
2.2.1 正六边形覆盖区域
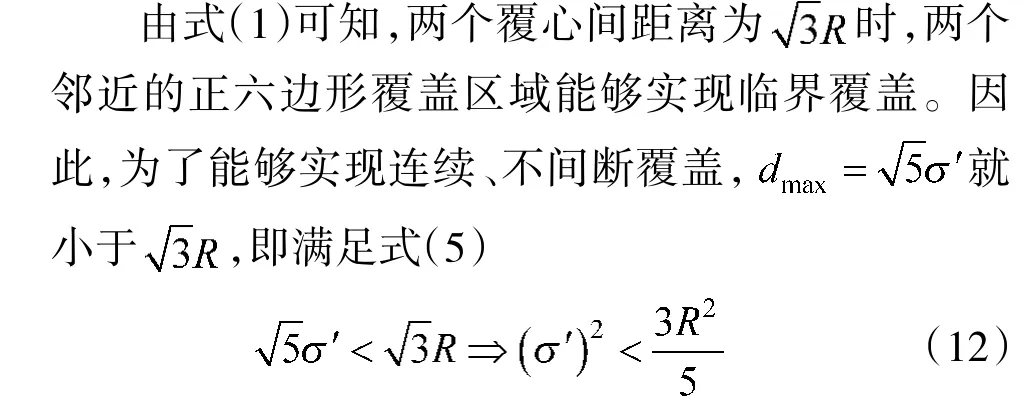
将式(12)代入式(11)可得:

2.2.2 正方形覆盖区域
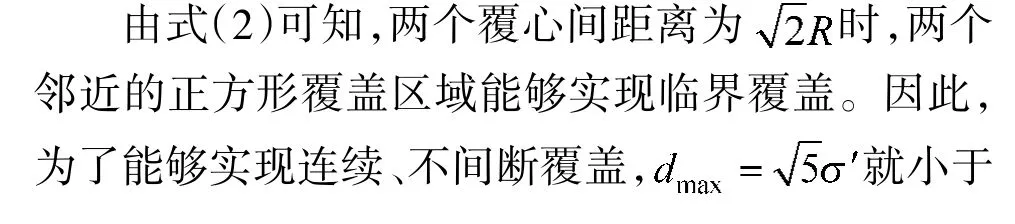

将式(13)代入式(11)可得:

式(13)和式(15)给出了在ST 逾渗理论下实现临界覆盖的节点密度值。依据文献[10-11],ρ取0.59,则在ST 模型下,节点密度值分别为:

表1 对HT 和ST 模型下的正六边形覆盖、正方形覆盖区域下4 种情况下的CND 的值。
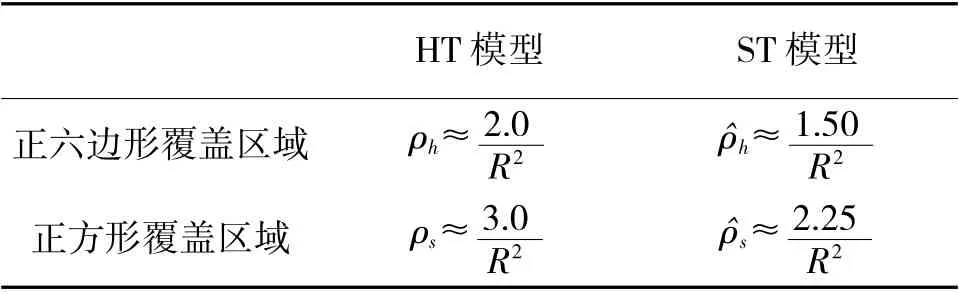
表1 不同情况下的CND
3 性能分析
3.1 仿真环境
利用MATLAB R2016a 软件建立仿真平台,并验证本文工作的准确性。在300 m×400 m 监测区域内部署m 个无人机(节点)。遵照泊松点过程(Poison Point Process,PPP)产生节点的初始位置。同时,节点依据CMM 移动模型进行移动。图6 给出了一个移动节点的抽样轨迹。每个移动节点的轨迹并不相同,但是它们的移动轨迹都是类似的多圈轨迹。
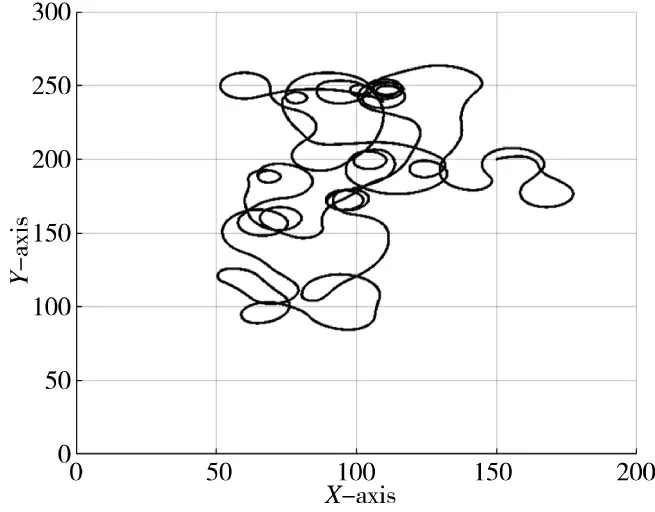
图6 一个节点的移动轨迹示例
记录20 000 s 的节点移动时间。从1 000 s 开始,每隔5 000 s 计算网络的覆盖情况。此外,节点的覆盖区域的半径与通信半径相等,且均为100 m,即R=r=100 m。
3.2 10 个节点的监测覆盖情况
图7 给出10 个移动节点覆盖,节点对监测区域300 m×400 m 的覆盖性能,其中,(a)表示仿真后1 000 s 时所记录的覆盖情况;(b)、(c)和(d)分别表示仿真后6 000 s、11 000 s 和16 000 s 所记录的覆盖情况。图中的正方形框表示覆盖的目标区域,红色区域表示已由无人机覆盖的区域;正方形框内的空白区域表示未覆盖区域。
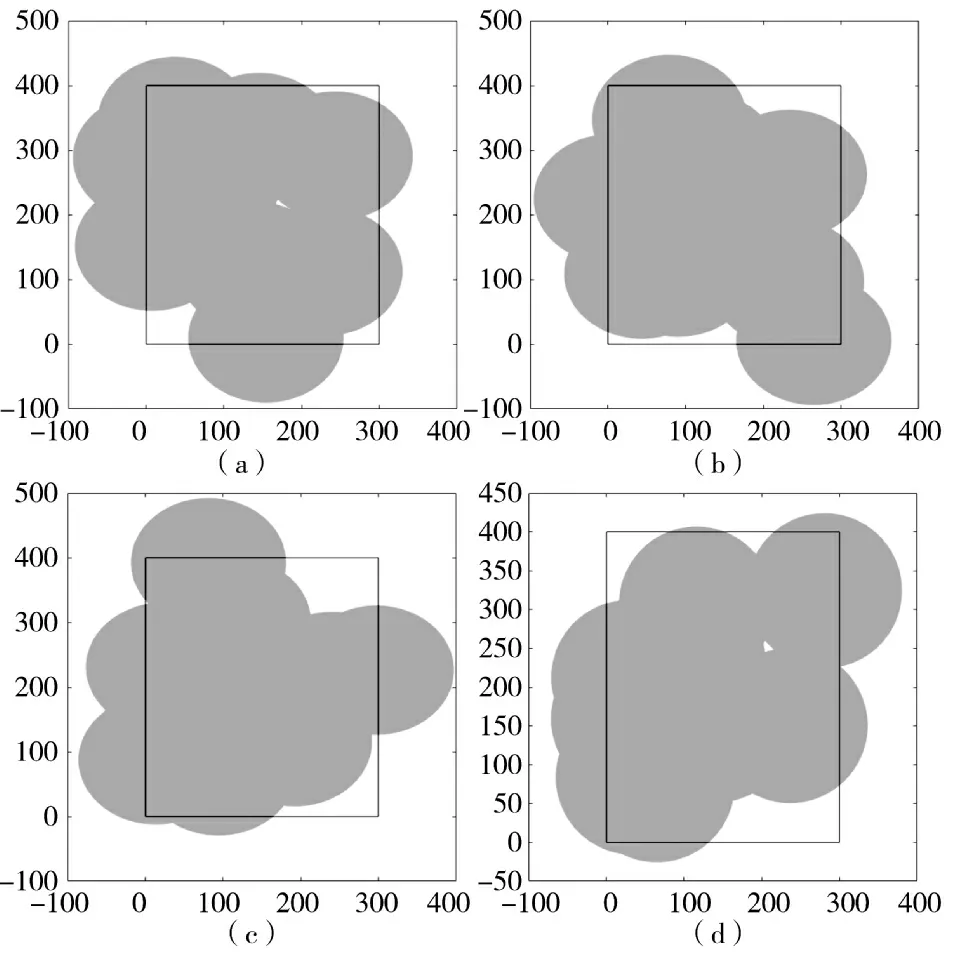
图7 10 个移动节点的覆盖情况
从图7 可知,10 个移动节点无法对300 m×400 m的监测区域进行全覆盖。依据所推导的临界节点密度值,对300 m×400 m 的监测区域进行100%的覆盖,至少需要36 个节点。
3.3 18 个节点和37 个节点的监测区域覆盖情况
图8 和图9 分别显示了18 个节点和37 个节点对监测区域的覆盖情况。
将图7 与图8 进行对比不难发现,图8 的监测区域覆盖率高于图7 的监测区域覆盖率,但是18个节点仍未能对监测区域进行100%的覆盖。
相比于图7 和图8,图9 中的矩形框内无空白区域,这表明37 个节点能够对监测区域实现100%的覆盖。这符合预期。依据所推导的临界节点密度,至少需要36 个节点才能对监测区域进行100%的覆盖。

图8 18 个移动节点的覆盖情况

图9 37 个移动节点的覆盖情况
4 结论
针对无人机网络的覆盖问题进行了研究,并利用逾渗理论推导了对覆盖区域进行全覆盖的临界节点密度值。从推导结果来看,六边形棋盘模型的覆盖性能优于正方形棋盘的覆盖性能。仿真结果表明,所推导的临界节点密度可作为判断无人机网络能否实现覆盖的重要依据。
