基于鲁棒滑模策略的电机伺服系统内模控制*
2022-04-27袁绩海郭迎清厉天凯
袁绩海,郭迎清,厉天凯,陈 建
(1.河南水利与环境职业学院,郑州 450011;2.西北工业大学动力与能源学院,西安 710072;3.解放军95903 部队,武汉 432200)
0 引言
伺服电机作为一种常用的控制单元,在诸多领域均能够看到其身影。由于伺服电机所处的工作环境往往是高温高速,因此,如何实现恶劣环境下的精确控制一直是研究的热点问题。
内模控制(Internal Model Control,IMC)为分析和设计控制系统提供了一个有效、直观、简单的框架,因此,在电机控制中应用广泛。文献[6]利用自适应补偿策略实现了电机调速系统的分段控制;文献[7]考虑到系统跳变,结合最小二乘支持向量机补偿策略,提出了一种内模控制方法;文献[8]提出了一种双自由度内模控制(2 Degree of Freedom,2DOF-IMC),并且利用改进遗传算法优化其中相应参数,有效提升了控制效果。不过以上研究给出的控制器性能对参数与经验有较高依赖性,因而控制水平有限。有的参数还需在线调整,为满足收敛性要求,还需要进行复杂的处理,这对其实际应用产生很不利影响。
滑模变结构控制(Sliding Mode Control,SMC)由于其强大的非线性控制能力得到了广泛关注。在各个领域均有应用,例如航空动力、工业控制、医疗器械等。不过为提高其跟踪性能,还需要控制抖振。对具体系统而言,其一般存在未建模动态,这种情况下在处理时如果基于边界层解抑制抖振,则会导致恒扰动时的稳态误差问题,而不满足精度要求。
本文在研究时对以上控制策略的缺陷进行具体分析,然后引入滑模与内模控制模型,且结合本系统的控制要求,而建立了基于鲁棒滑模控制律的改进内模控制器,通过其对伺服电机进行控制。这种控制器在受扰与模型不确定条件下也可以满足控制精度要求。该控制器主要基于SMC 结构确定出IMC 控制器的性能,且利用SMC 技术进行控制,而满足相应的鲁棒性要求。为处理稳态误差且提高控制鲁棒性,而结合了2DOF-IMC 结构的增强型IMC策略。
1 系统建模
伺服系统的组成单元为交流伺服电机和驱动器,可通过如下表达式描述其惯性荷载方程:

其中,θ 表示角位移,J 是惯性负载、D(t)对应于未建模干扰;对式(1)进行转换处理,而确定出如下的状态空间模型:

假设1.参数不确定性的边界已知,即:

假设2.未知干扰d(t)的边界为:

2 控制器设计
2.1 基于IMC 的标准控制器设计
由式(1)可得伺服系统的传递函数G(s)为

式中,J和B分别为参数J 和B 的标称值,在研究时选择的IMC 滤波器可表示如下:
其中,R 为参考轨迹。考虑到R(s)=0,D=0 的调节器情况,假设G(s)=G(s),则输出可表示为:

分析以上公式可知,在输入扰动恒定条件下,必然导致稳态误差,因而控制精度受到影响。
2.2 基于SMC 的鲁棒SIMC-PD 控制器设计
鲁棒滑模控制结合标准内模控制(Standard Internal Model Controller,SIMC)的控制结构如图1 所示,该控制器可表示为:

图1 SMC-SIMC-PD 控制器的结构

符合以上条件的u在设计时,可参考文献[14-15]。以下进行举例说明,如令g 为平滑函数

若存在环境扰动,且模型不确定性,则根据以上方法提出的SIMC-PD-SMC 模型可满足系统跟踪精确性和稳定性要求。由于引入了不确定界限,这种情况下式(15)可等效于高增益反馈控制律,由于ε 值和控制带宽存在负相关关系,因而其过小可能导致不稳定。为此就需要适当限定ε 值,这样可确保在原点附近系统保持稳定。
2.3 2DOF-IMC 控制器设计
2DOF-IMC 滤波器为:

为确保恒扰动状态下,系统在控制时零稳态误差,就需要符合如下要求:

令基于2DOF-IMC 的控制器为:

为满足特定的跟踪性能要求,就需要引入如下表达式对应的定点滤波器F(s):

然后,设置滤波参考轨迹R为:


图2 显示出上述增强型内模控制器的结构相关情况,其控制律可描述如下:

图2 2DOF-IMC-SMC 控制器的结构
定义另一个跟踪误差函数为:

从p到z的传递函数可以表示为:

由于G(s)是渐进稳定的,所以p收敛到零意味着使z也收敛到零。
结合以上三式,而得到p的动力学模型:

考虑到假设1 和假设2,同样存在满足以下条件的u:

定理1:若目标轨迹函数二阶连续可微分,且对应的约束条件式(22)可确保系统有界。这种情况下可通过如下表达式描述出李亚普诺夫函数V:

上式满足:

证明:
联立式(6)、式(9)、式(19)、式(20)可得:

对式(32)积分,可得:

由式(29)和式(35)得到V的导数:

注意到条件(28),则有:

根据以上分析可知函数V有界,可很好地控制u 有界。
具体分析定理1 的结果可发现,p对z表现出相同的稳定性,由此可判断出在同样有限的ε 值条件下,z和p的解可能相一致。不过二者和误差z的关系存在明显差异,这可基于函数G(s)和G(s)进行解释。由于k=k,这样可确定出表达式:

3 仿真结果
3.1 阶跃扰动下的阶跃响应
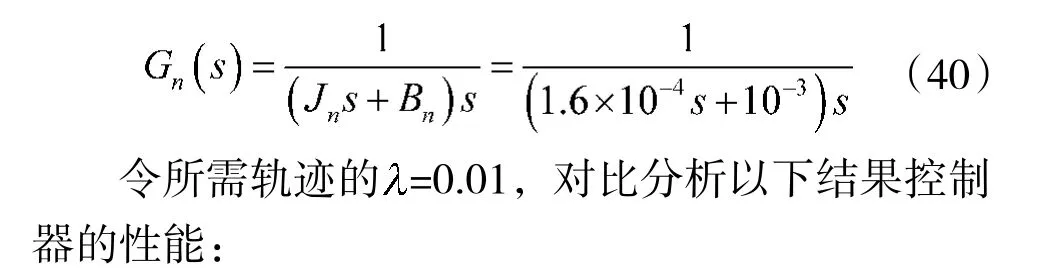
首先进行仿真验证,给定伺服系统的标称模型如下所示:
1)SIMC-PD:此种控制器单纯基于内模控制,在控制过程中可以方便地确定出其参数,即k=0.1,k=0.1。
4)2DOF-IMC-SMC:在研究过程中为了进行客观的对比分析,而控制PID 与2DOF-IMC-PID 控制器的参数相一致。
首先,输入阶跃扰动,然后进行仿真分析,确定出各控制器的阶跃响应性能,在此基础上对比确定出性能最优的控制器。设置阶跃响应R(t)=1 rad,阶跃扰动大小等于0.3 Nm。目标模型描述为G(s)=G(s)。在此条件下仿真分析确定出结果如图3 所示。根据图3 可发现各控制器的定点跟踪目标都能实现。在有阶跃扰动情况下,其中SIMC-SMC 控制器分稳态误差最低,其和SIMC-PD 控制器的稳态跟踪误差都非零。而其余两个控制器的跟踪误差收敛至零,因而可更好地满足控制精确性要求。根据图3结果还可看出,其中2DOF-IMC-PID 控制器的跟踪误差最大为0.1 rad,而2DOF-IMC-SMC 的为0.04 rad。由此可判断出在前者中引入鲁棒滑模控制律,可使得跟踪误差进一步减小。带入参数进行仿真分析还可看出,对SIMC-PD、2DOF-IMC-PID 控制器而言,引入鲁棒滑模控制进行改进后,对应的扰动都有一定幅度降低,相应的跟踪精确性提高。在最优化条件下跟踪误差可利用ε 进行任意的调节。
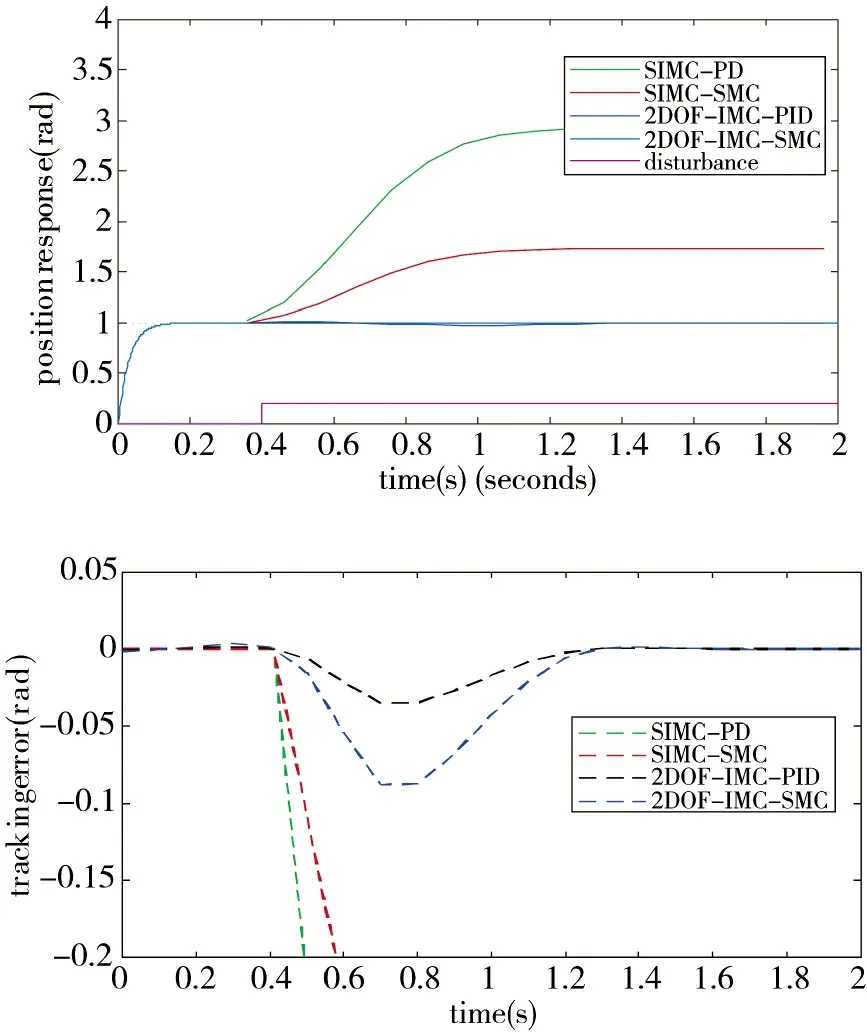
图3 在阶跃扰动下的位置阶跃响应
具体分析定理1 可发现,对有限小的ε,恒扰动情况下,z和p都会产生稳态误差。而根据图4 结果发现,在频率趋于零条件下,相应的G(s)也基本上恒定,G(s)趋于零。由此也说明在同样条件下,2DOF-IMC-SMC 控制器分稳态误差可趋于零。在各频率条件下,G(s)值都低于G(s)。这也可判断出,在其他参数同样条件下,2DOF-IMC-SMC 控制器的瞬态跟踪性能更好,且产生的跟踪误差低。在频率很大情况下,二者的跟踪精度基本相同。
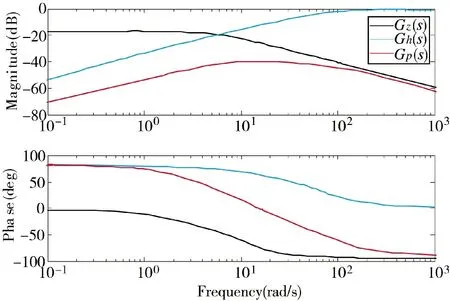
图4 波德图
3.2 参数不确定性时的阶跃响应

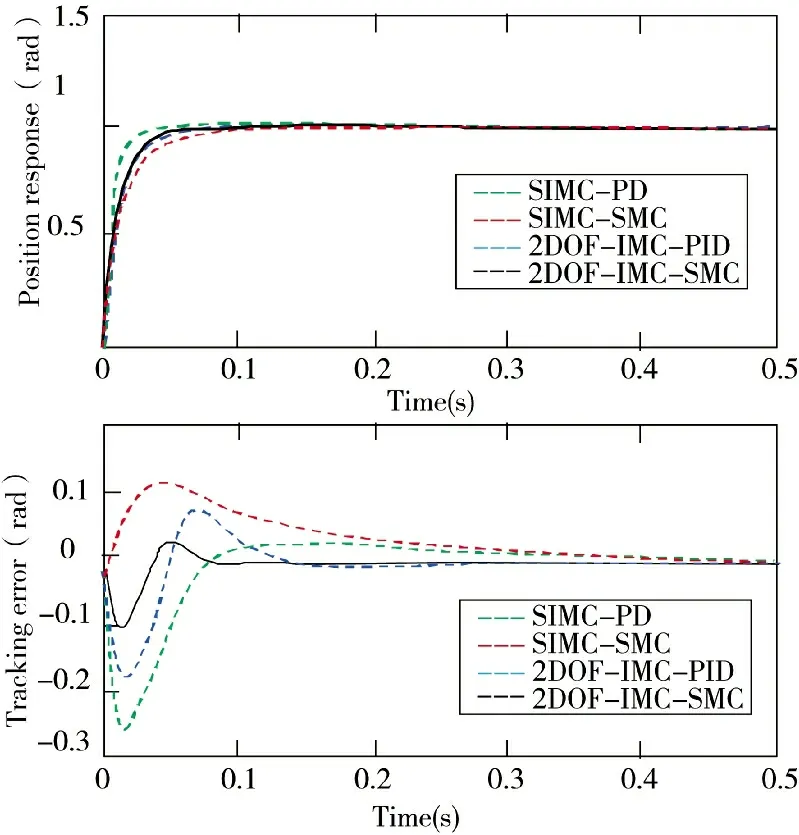
图6 J=0.5Jn,B=Bn 时的阶跃响应

图7 B=10Bn,J=Jn 时的阶跃响应


图5 J=2Jn,B=2Bn 时的阶跃响应

图8 B=0.1Bn,J=Jn 时的阶跃响应

表1 跟踪响应的Max|z1|和IAE
不确定性情形下,SIMC-SMC 控制器会产生一定跟踪误差。对比分析以上的控制结果可知,将这种控制结构引入高鲁棒性的改进IMC 控制器时,相应的跟踪性能会明显提升。
由此说明在模型不确定和外部干扰扰动条件下,本文建立的这种2DOF-IMC-SMC 控制器都表现出良好的控制性能,和其他控制器相比性能更优。
4 实验验证
4.1 实验设置
在实验时建立了如图9 所示的实验平台。对应的软件主要有监控软件(Twincat 3.0 Scope View)和实时控制软件。在进行代码编程时应用了C/C++语言,设置的步长为0.25 ms。根据系统控制要求和实验平台情况而编写对应的控制代码,通过实控软件模拟外界扰动与参数不确定性。相应的实验情况具体如下:通过工控机设置控制器,且计算确定参数,CAN 总线进行数据通信,针对伺服电机进行控制。检测伺服电机的状态变量,形成相应的偏差。然后根据控制目标而确定出控制量,据此满足控制要求。

图9 伺服系统的实验平台

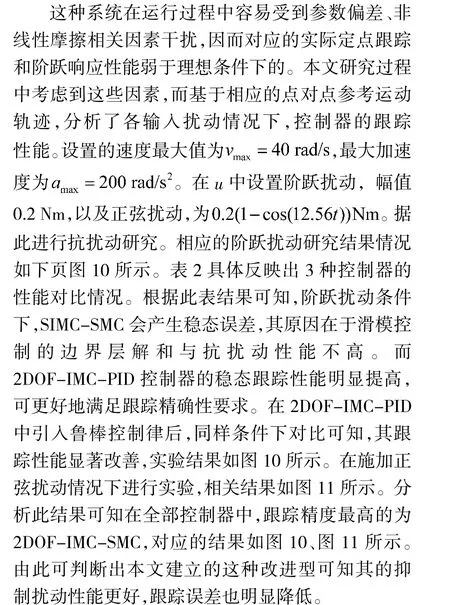
4.2 扰动条件下的位置跟踪
4.3 不确定条件下的位置跟踪


图10 阶跃扰动下的位置跟踪误差

图11 正弦扰动下的位置跟踪误差
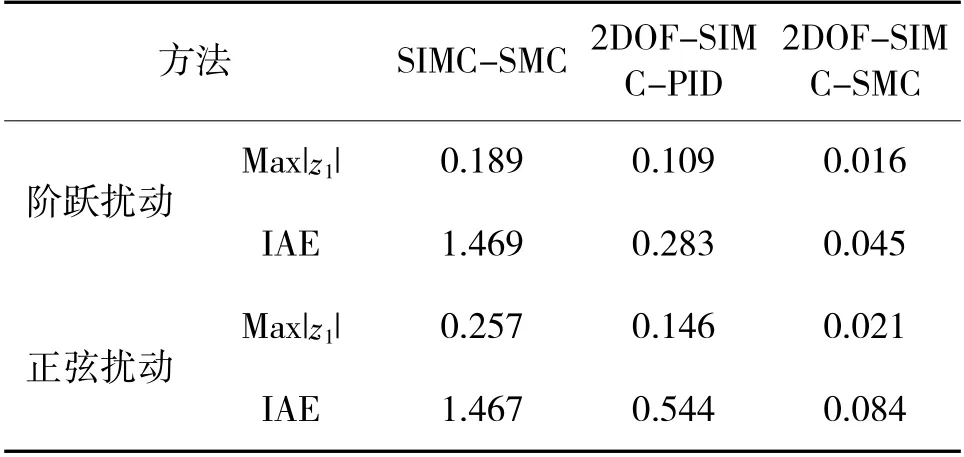
表2 阶跃扰动下跟踪Max|z1|和IAE



图12 正弦型参考轨迹


表3 正弦跟踪下的Max|z1|和IAE
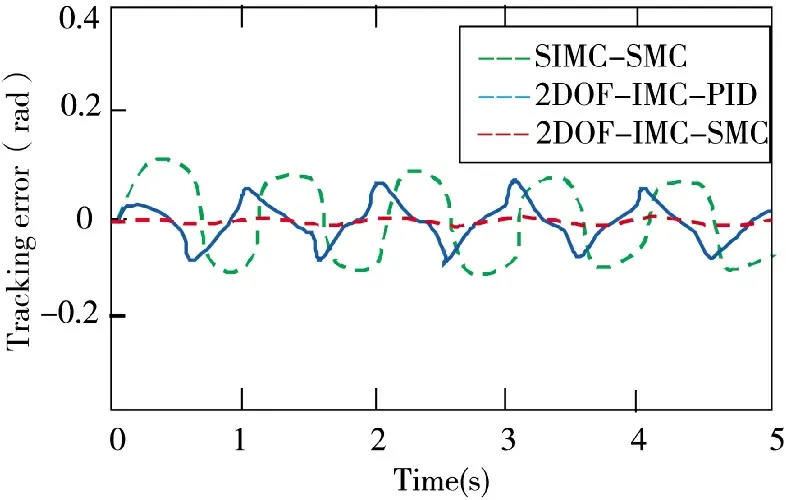
图13 情况A 下的位置跟踪误差
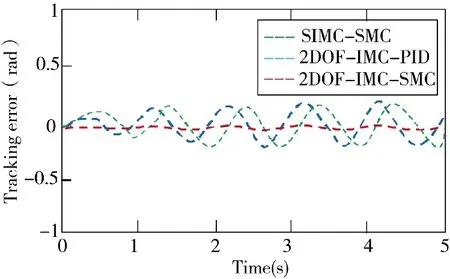
图14 情况B 下的位置跟踪误差
5 结论
本文建立了基于鲁棒滑模策略的双自由度增强型内模控制器,通过其对不确定性和扰动条件下的伺服电机进行控制,且作了仿真分析和实验对比研究,所得结果如下:
1)引入鲁棒滑模控制律可显著抑制环境扰动与参数不确定性,有利于提升系统跟踪稳定性。
2)低频条件下双自由度增强型内模控制的性能更优,可提高系统的抗扰性,瞬态跟踪性能明显改善,且跟踪精确性也提高。
3)结合以上两种策略的控制器可明显改善系统跟踪渐进稳定性,在参数不确定性和环境扰动情况下,都有较高的鲁棒性,跟踪性能大幅度提升。
