城轨车辆塞拉门传动机构分析
2022-04-26麻冰玲MABingling
麻冰玲 MA Bing-ling
(辽宁轨道交通职业学院,沈阳 110023)
0 引言
塞拉门是城市轨道交通车辆的重要组成部分,与运营安全有着密切的关系。塞拉门的开关动作是门页借助于车门上方安装的悬挂机构和导轨导向作用,由电动机驱动机械传动机构使门页沿着导轨滑动。机械传动机构是决定塞拉门开关平稳性的关键部件,在塞拉门机构中,有吊杆摆式机构和平动机构两种。相比之下,平动机构的结构设计简单,运动合理,因此城市轨道交通车辆基本上选用平动机构。平动机构是一种由两个独立运动叠加而形成的一种运动形式,通常这种运动需要两组独立的运动副和两个独立的驱动单元,并由此构成传动机构。
1 平动机构结构分析
平动机构是一种由两个独立运动叠加而形成的一种运动形式,通常这种运动需要两组独立的运动副和两个独立的驱动单元,并由此构成机构。在使用中,将两组运动副和驱动单元进行组合,组成多种结构形式。通常两组运动副的运动方向相互垂直,由此构成一个平面,组合运动原点,在这个平面上形成任意需要的曲线轨迹。
假设以X 代表水平运动副,以Y 代表垂直运动副,m,n 分别代表数量,那么平移机构的简单表述就是:mX+nY。在这里,m,n 是正整数。1X+1Y 结构及1X+2Y 结构如图1、图2 所示。
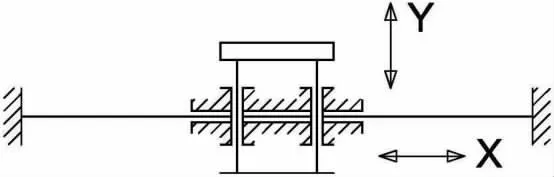
图1 1X+1Y 结构

图2 1X+2Y 结构
2 1X+2Y 结构的运动分析
1X+2Y 结构的组合如图3 所示。
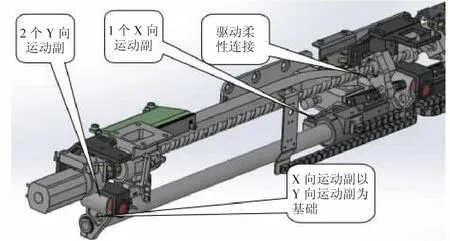
图3 1X+2Y 结构的组合
X 向运动与Y 向运动,是两个独立的运动,相互并无关联,但是在一种平动塞拉机构中,将两个运动组合在了一起,形成了一种相互制约的关系。X 向运动发生时,并不依靠或受制于Y 向运动,实际上这种机构,X 向运动的确是叠加在Y 向运动之上的,X 向运动必须跟随于Y 向运动,在机构的动作过程中,X 向运动副也要产生Y 向运动。因此在驱动装置与X 向运动副的连接时,就必须使用柔性连接机构,进而增加环节,也增加了组成部件的数量。
为了实现直线塞动机构形式,在水平方向增加了宽度,因此原来的门体水平移动行程,可能会受到限制。如果真的受到了限制,就需要加大驱动装置的行程,也就是加大丝杠的行程,或外移解锁机构,或改变解锁机构。
3 CPF 结构分析
基本运动:拉动和塞动,拉动是主运动,塞动是副运动。
运动副:直线运动副,吊杆运动副。直线运动副,可以形成大位移,运动轨迹是直线,吊杆运动副用于小位移和摆动运动,轨迹是曲线。
现有结构是两种运动副的组合。代表性的有:直线与吊杆组合,直线与直线组合。相对而言,直线与直线组合的结构简单。采用导柱导套作为主运动的直线运动副,因为这种运动副不是全约束的,主运动副也不能采用双导柱导套结构,那样就变成了全约束。
CPF 结构拉动机构直线运动副,采用圆柱套杆滑动副,包括直径、滑动轴承、配合长度等。增加塞动机构直线运动副,采用圆柱套杆滑动副,对拉动机构直线运动副中的导杆,采用三点支撑,既左右端部及中间三点。拉动机构直线运动副中的滑套,与塞动机构的运动副支架,组合成一个整体,并在塞动机构的运动副支架上,固定安装塞动机构运动副的导杆。塞动机构设置两个运动副,其中一个运动副的导杆为偏心结构,通过转动导杆,调整门体的姿态,既将原来门体与携门架偏心螺母的调整点,转移到塞动机构中。
4 三种传动机构比较分析
依据塞拉门传动机构的运动分析,将机构中的运动部件改用CPF 结构形式,并做出样机,分别做出两种形式:CPF1 型、CPF2 型;为了验证CPF 型结构的运行状态,将CPF1 型、CPF2 型以及康尼型分别在实验台上运行试验,试验过程中发现,在CPF2 型结构中,副导轨随门体晃动而晃动,这种晃动在静态和动态中都异常严重,严重影响车门的运行品质。CPF1 型、CPF2 型也采用直线复合运动的方式,在Y 向运动也采用2 个运动副,并将这两个运动副移向中心,以减小2 个Y 向运动副的跨距,2 个Y 向运动副之间的距离与运动副的导向长度之间的比值称为长径比,在小长径比情况下,运动副会有卡滞的趋势;在不改变导向长度的前提下,增大长径比有利于塞运动的顺滑。选用导柱导套的直线运动副,组件采用直线轴承。直线轴承是一种精度高、成本低、摩擦阻力小的直线运动系统,理论上直线轴承具有良好的导向品质,即使无法进行间隙调整,也不应该出现类似的现象,因此只能从轴承相关组件之间查找问题,对城轨车辆塞拉门机构组件进行相关测量分析,查找产生晃动的原因,逐项排除问题,寻求合理可行的解决方案。
CPF1 型、CPF2 型以及康尼型的结构如图4、图5、图6所示。
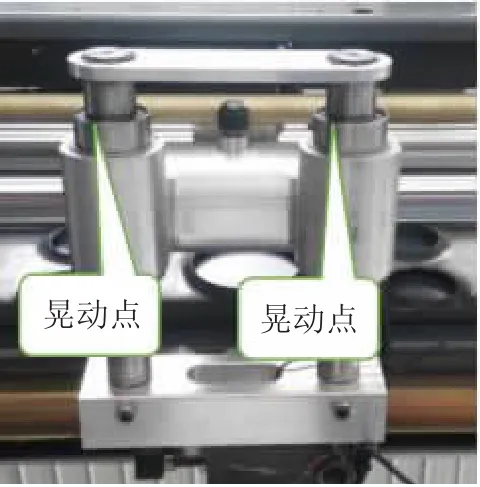
图4 CPF1 结构
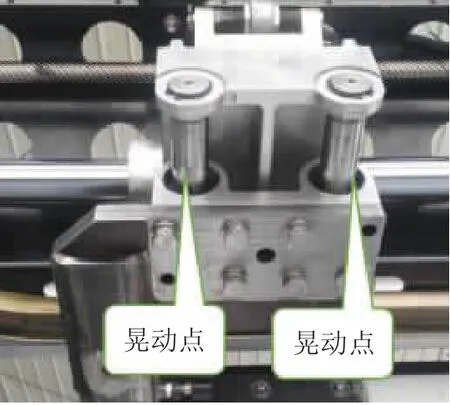
图5 CPF2 结构

图6 康尼结构
三种传动机构副传动幅略有差异。CPF1 型与康尼型的结构相同,导柱直径30mm,直线走抽的长度都是加长型的,而CPF2 型采用的直径30mm 标准型的直线轴承,其中会有些许的差异,但不至于产生如此严重的偏差。
为了验证三种传动结构的平稳性,人为使塞拉门产生晃动,产生晃动的方法是抓住门体,左右推拉,重复动作,即可见图示的晃动点的左右传动幅有明显的反向移动。晃动主要出现在副传动幅上,且晃动肉眼可见。
5 三种传动机构测量分析
为定量说明,分别对三种形式的晃动点进行测量,对门机构处于直线运动段,在静止、左推右拉、左拉右推三种形态时,分别对两个晃动点的变动数值进行进行测量。使用游标卡尺作为测量工具。
①CPF1 型测量。
对CPF1 型结构双导柱(下式)摆动量测量,副运动幅几乎没有晃动,运动平稳。
②CPF2 型测量。
对CPF2 型结构双导柱(上式)摆动量测量,通过实际观察,由于CPF2 型结构,导轮位置对于对于摆动量没有影响,或影响极小,因此,可以在任意位置上选取一点进行测量。测量结果:一个晃动点的摆动量分别为1.4mm,另外一个晃动点的摆动量分别为4.5mm,单从数据上看,这个摆动量并不算大,但是将这个摆动量通过与携门架连接的门体的放大效应,在门体上的反映就十分的显著。
③康尼型测量。
对康尼双付导柱结构摆动量测量,晃动的形式是以在滑槽内的导轮为支点,形成的滑移摆动。靠近导轮的测点,摆动量小,远离导轮的测点,摆动量大。
6 组件测量分析
CPF 型使用LMS30UU 轴承,对于直线轴承,以及直线导轨,运动副的间隙可能无法调整,就需要依据轴承的使用要求,满足相应的尺寸和性能要求。同时,对于轴承的使用,也要满足轴承自身规定的特性,比如承载能力。CPF1型与康尼型使用是相同的组件,然而在晃动表现上却有明显差异,由此判断是结构差异造成的影响。对于CPF2 型,结构不同,组件不同,可能因此产生不同影响。为此,对两种形式的副传动幅部件进行测量。使用千分表进行摆动测量;使用高度尺进行间隙测量。测量位置如图7、图8所示。

图7 轴与组件测量

图8 轴承与挂架测量
①LM30LUU 轴承组成部件的间隙测量。
间隙测量:将导杆置于两块等高的垫铁上,在两个方向上测量两个测点的高差,再与实际高差比较,所得差值即为间隙值。
测量结果:
轴承与挂架间因使用了紧配合,可以视为没有晃动或是有不可测量的晃动。轴与组件间有晃动,晃动量为0.30mm。推测此晃动量由轴与轴承之间的装配间隙造成。此间隙不可消除,只能通过提高相应的精度,适量减缓,但不能完全消除。然而提高精度会提高造成成本,需要找到成本平衡点。间隙测量可视的结果是0.02~0.04mm,属于相对合理的范围。
②LM30LUU 轴承组成部件的摆动测量。
摆动测量:将挂架固定在台钳上,将导杆插入。在导杆最大伸出状态时,测量单向径向摆动量。测量位置如图9所示。

图9 摆动测量
测量结果:
摆动量值达1.5mm,说明轴与组件之间存在间隙。轴与组件之间的可测量间隙为0.3mm,明显高于合理范围。由此可以推断出CPF2 型摆动是因间隙过大造成。
③应对措施。
在实施导轴加工过程中,轴承与挂架之间存在明显的晃动。通过塞尺检查,使用0.2mm 塞尺可以轻松通过,0.3mm 塞尺则比较困难。
采用加楔块的方法消除间隙,使用不锈钢焊丝,压扁,支撑楔铁,在同方向的双侧,按照适当的力度,加入楔铁。原则上,既要消除间隙,又不能使轴承变形而影响直线滑动。施加方法如图10、图11 所示。

图10 楔铁

图11 施加楔铁
在实施上述操作后,消除组件的间隙,附加摆动量消除。重新安装以后,晃动消过大的问题得以解决。
7 结论
通过分析和测量,以及最后的试验运行检验,得到以下的结论:
①CPF 结构采用1X+1Y 结构的平动机构,能减少1X与1Y 的关联,还能使得总体结构简单,达到结构优化的目的。
②CPF 结构塞动机构的移动范围大于门体的行程要求,因此不影响门体行程、水平净开度和垂直净开度,直线塞动运动是可行的。
③为了实现直线塞动机构形式,在水平方向增加了宽度,为了不影响原来的门体水平移动行程,可以加大丝杠的行程,或外移解锁机构,或改变解锁机构从而加大驱动装置的行程。
④轴承形式,即加长型LM30LUU 和普通型LM30UU,对于副运动幅的运动形态,短时间内的影响较小,在长时间的运行中会出现影响,诸如磨耗、寿命等,但是依据轴承的特性,合理选用相关参数,可消除这种影响,或控制影响在一个合理的预期范围内。
⑤在装配过程中,轴承与挂架间的安装、轴与轴承的装配,操作的熟练程度及操作者的经验会直接影响组件的性能。需要熟知直线轴承的特性并合理使用,参数选尽可能合理,比如:跨距受制于结构尺寸的限制,同时也受到门体尺寸重量的影响,在可能的情况下,尽可能的加大;导杆直径、导向长度,从而保证其运动性能。