基于惯性导航技术的露天矿爆破过程矿岩运动规律研究
2022-04-26荆洪迪于健洋柳小波孙效玉
吴 豪 荆洪迪 于健洋 柳小波 孙效玉
(1.东北大学资源与土木工程学院,辽宁 沈阳 110819;2.中国科学院沈阳自动化研究所,辽宁 沈阳 110169;3.北京科技大学土木与资源工程学院,北京 100083)
爆破是露天矿生产过程中的一个重要环节,爆破效果的好坏直接关系到矿山的经济效益[1],对爆破过程中的矿岩运动规律进行研究可以为爆破效果智能评价和矿岩分离爆破研究提供理论依据,从而指导优化爆破设计和降低爆破过程矿石的损失贫化[2],因此对爆破过程中的矿岩运动规律进行研究具有重要意义。
由于爆破会在短时间内产生巨大的能量,矿岩会剧烈运动并伴随有炮烟生成,现场环境非常恶劣[3],难以完整准确地采集到爆破过程中矿岩运动信息,因此国内外对于爆破时矿岩运动规律的相关研究相对较少,主要有3种研究方法:理论分析法、模拟试验法和图像识别方法。理论方法研究方面,Zou D[3]通过理论分析对露天采场爆破后矿岩分布进行了计算,马力等[4]从能量的角度通过理论分析和公式推导对爆破时岩石的破碎抛掷过程和受力特性进行了分析。然而理论计算方法往往会受爆破方式、装药结构和岩石强度等诸多因素影响,其结果的准确性和普适性较弱。一些学者采用数值模拟方法对飞石轨迹进行分析,Amini H等[5]利用SVM方法对露天爆破中的飞石现象进行了分析,顾红建等[6]利用FLAC3D动力分析程序建立了露天台阶爆破仿真分析模型来分析爆破飞石的形成机理。然而数值模拟方法往往会对边界条件和材料属性进行简化,因此其结果误差较大,参考价值相对较少。图像识别方法如Manoj K等[7]利用机器学习方法对露天爆破中的飞石预测进行了研究,李祥龙等[8]利用高速摄影方法对爆破过程中的矿石鼓包规律进行了研究,栾龙发等[9]通过高速摄影方法研究了深孔台阶爆破岩石移动规律。但是该方法受现场炮烟影响不能完整记录现场矿岩的运动过程。以上3种方法均不能为爆破矿岩运动规律分析提供完整准确信息,因此,有必要采取一种可以完整记录矿岩运动过程的研究方法。由于惯性传感器具备不受外界干扰独立进行工作的特点[10],在有保护装置的情况下能够在爆破现场独立工作记录数据并具有较高精度,本研究提出了利用惯性传感器获取物体运动数据,通过研究矿岩运动轨迹生成算法将传感器数据转化为空间轨迹,根据不同位置矿岩空间轨迹对比结果对爆破过程中的矿岩运动规律进行了探索。
1 惯性导航技术概述
惯性导航通常指利用惯性传感器装载到物体上测量物体的角运动信息和线运动信息[11],其中惯性传感器是一种测量和检测物体加速度、倾斜、旋转和多自由度运动的传感器[12],其主要包括加速度传感器和角速度传感器(陀螺仪),通常将它们进行单、双、三轴组合成为惯性测量单元[13],通过相关算法将惯性传感器采集到的数据转化为导航信息,形成自主导航系统,以传感器的装载方式可以将惯性导航系统分为平台式惯性导航和捷联式惯性导航[14]。其中平台式惯性导航是指直接将惯性传感器安装在惯性平台上,其优点是惯性平台能够隔离运动物体角运动对测量装置的影响、系统精度较高和计算简单,缺点是重量和尺寸较大、结构复杂并且成本较高;捷联式惯性导航是指将惯性传感器直接安装在载体上来记录载体的角运动信息和线运动信息[15],其优点是没有平台、体积较小和结构简单,缺点是对载体上的元件要求较高并且坐标变换过程计算量大。随着MEMS(微机电系统)的迅速发展,捷联式惯性导航以其成本低、体积小的特点被广泛应用于导航领域[16],本研究所采用的MEMS惯性传感器属于捷联式惯性导航。
2 矿岩运动轨迹生成算法研究
在捷联惯性导航技术的基础上对矿岩运动轨迹生成算法进行了研究,算法的主要流程如图1所示,主要步骤为:①通过矿岩初始位置信息和每一时刻的角速度数据求取每一时刻的姿态变换矩阵,本步骤涉及传感器坐标系和炮孔坐标系的转换;②根据每一时刻的姿态变换矩阵和加速度数据获取每一时刻的速度数据;③利用矿岩在每一时刻的速度信息求取其在每一时刻的位置信息;④将各个时刻的位置信息输入到三维空间坐标系生成了矿岩的三维空间运动轨迹。
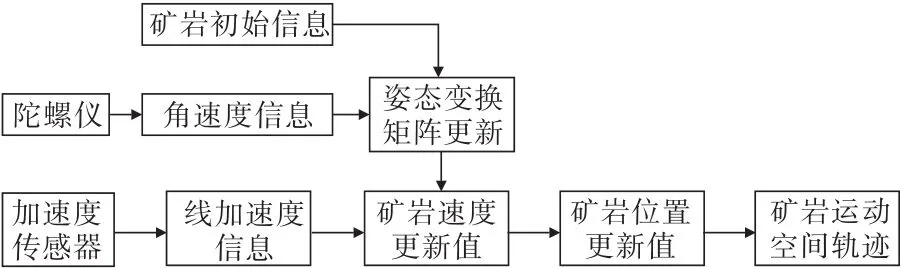
图1 矿岩运动轨迹生成算法流程Fig.1 Flow of ore and rock motion trajectory generation algorithm
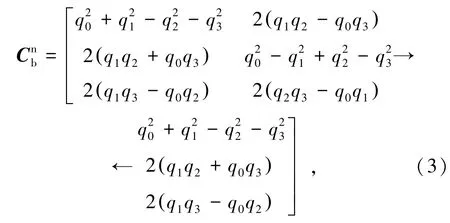
2.1 姿态变换矩阵更新值获取
首先定义2个空间坐标系,分别是传感器坐标系和炮孔坐标系,其中传感器坐标系始终与传感器自身保持一致,随着传感器的运动而运动,炮孔坐标系是以炮孔为原点固定不动的坐标系,属于固定坐标系,不随着传感器的运动而运动,传感器采集到的运动数据是基于传感器坐标系的数据,而最终求取的矿岩位置信息为矿岩在炮孔坐标系中的位置信息,因此涉及到2个坐标系的转换。
传感器直接采集到的数据是相对于传感器坐标系的数据,需要通过坐标系的变换才能转化到炮孔坐标系,其变换的本质是求取2个坐标系之间的姿态变换矩阵。通常用于描述2个坐标系之间关系的方法有欧拉角法、四元数法、方向余弦法和等效旋转矢量法4种,其中四元数法的本质是求解4个线性微分方程,计算量小、算法简单并且易于操作,故本研究采取四元数法进行姿态变换矩阵的求解。
四元数是由实数单位1和虚数单位i、j、k构成的含有4个元素的数,其具体形式如下:

式中,Q为四元数;q0,q1,q2,q3为4个实数;1是四元数实数部分的基;i、j、k为单位向量,是四元数虚数部分的基;q为四元数的虚部向量。
设传感器坐标系为b系,取右前上为正方向;炮孔坐标系为n系,由于现场方位难以准确标定,并根据试验需求,本试验采用空间直角坐标系的规定如下:垂直坡面方向外为X轴正方向,沿坡面方向左为Y轴正方向,向上为Z轴正方向。计描述惯性传感器姿态的四元数为,其满足微分方程:

2.2 炮孔坐标系中矿岩运动速度求解
求解矿岩在炮孔坐标系中的运动速度的本质是对加速度传感器测得的加速度数据进行积分,由于加速度传感器采集到的加速度数据是基于传感器坐标系的数据,因此需要通过姿态变换矩阵将每一时刻的传感器加速度值转化到炮孔坐标系中。根据加速度传感器的工作原理,其采集到的数据是传感器相对于惯性空间的绝对加速度和引力加速度的差,因此在求解时需要减去重力加速度。
在已有加速度传感器数据、姿态变换矩阵和重力计算的情况下,矿岩在炮孔坐标系中的速度满足以下微分方程:

求解微分方程可得:

式中,ΔVn为单位时间内速度变化量;Δt为相邻2个时刻间隔。
利用中值法对速度进行求解,过程如下:

2.3 炮孔坐标系中矿岩位置求解
求解矿岩在炮孔坐标系中的运动速度的位置信息的本质是对速度进行积分,因此在已知矿岩在炮孔坐标系中速度的基础上,可以对位置信息进行求解,惯性传感器在炮孔坐标系中的位置满足以下微分方程:

求解上述微分方程可得:

式中,ΔPn为单位时间内位置的变化量。
利用中值法对位置进行求解,位置的更新过程如下:

将速度通解代入可以得到基于中值法的位置更新式为
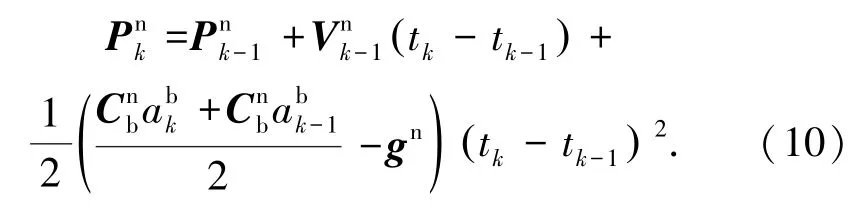
根据上述过程的推算可以获得矿岩在炮孔坐标系中每一时刻的位置更新值,由于求解过程计算较为复杂且计算量较大,需要借助计算机进行运算,因此在MATLAB数学软件中将本算法转化为计算机语言,建立包含各个求解步骤的函数库,通过读取惯性传感器采集到的数据和调用各个函数最终完成矿岩在炮孔坐标系中真实运动轨迹的图像输出。
3 现场试验和数据处理
以齐大山露天矿-105 m水平采区为例进行试验,对压渣爆破过程中的矿岩运动规律进行研究,具体试验过程和结果如下。
3.1 试验方案设计
(1)试验基础条件介绍。实验场地是鞍钢齐大山铁矿-105 m水平采区,爆破类型为压渣爆破,共计62炮孔,采用矩形布孔方式,孔距7.5 m,排距6 m,逐孔起爆,炮孔直径250 mm,炮孔深度17.5 m,超深2.5 m,阶段高度15m,炸药类型为乳化炸药和铵油炸药,单孔最大药量为650 kg,设计总药量为37 000 kg。
(2)惯性传感器和保护装置。惯性传感器体积为51.3 mm×365 mm×15 mm,内置独立电源可供电5 h,加速度量程为±16g,角速度量程为±2 000°/s,数据采集频率为200 Hz,惯性传感器的样式如图2所示。由于爆破过程中产生的巨大能量会对传感器产生强烈的冲击和挤压作用,必须要设计特殊的保护装置对传感器进行保护,因此本试验利用EVA减震海绵材料和3D打印PE塑料传感器保护装置进行了设计,该保护装置按结构分为内、中和外3层保护,其实体样式如图3所示。

图2 实验用惯性传感器Fig.2 Inertial sensor for test

图3 惯性传感器保护装置实体图Fig.3 Entity diagram of inertial sensor protection device
(3)传感器布置方式。采区爆破前和爆破后的三维模型如图4、图5所示,采区边坡外部存在上一次爆破留下的爆堆,左侧采区整体分为3排炮孔,分别是前排孔、中间孔和后排孔,其中前排孔是指靠近边坡的炮孔。本次实验一共放置3个惯性传感器,编号分别为1、2和3,传感器具体位置如图4所示,其中1号传感器位于外侧没有爆堆的边坡炮孔附近,2号传感器位于外侧有爆堆的边坡炮孔附近,3号传感器位于距离边坡较远的位置的炮孔附近,传感器水平放置,X轴正方向为垂直坡面方向。
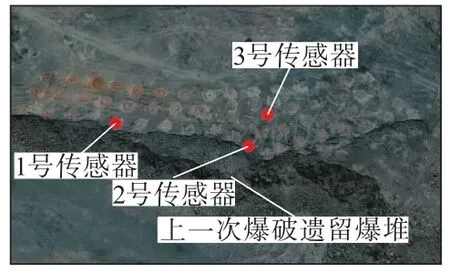
图4 爆破前采场三维模型Fig.4 Three-dimensional model of open pit before blasting

图5 爆破后采场三维模型Fig.5 Three-dimensional model of open pit after blasting
3.2 试验实施
试验过程具体一共分为五步,包括将SD卡插入惯性传感器(插入后自动开机)、将传感器放置到保护装置内、传感器校准并调整参数、埋置传感器和回收传感器。具体操作流程如下:
(1)在电脑上安装端口驱动,等待安装成功,打开上位机软件,将SD卡插入传感器,传感器自动开机并开始记录数据,将连接数据线连接到传感器。
(2)传感器按照标定方向放置到保护装置中。
(3)利用数据线连接传感器电脑,打开上位机进入配置界面,调节回传速率为200 Hz,并勾选内容栏中的“时间、加速度和陀螺仪”复选框,在配置界面,分别点击校准时间、加速度计,对时间、加速度计进行校准,校准完毕后,从电脑端拔出数据线。
(4)把装有传感器的保护装置按照标定方向埋置在炮孔表面,并在彩色保护袋中装入炮孔填塞物,保持整体水平,记录爆破开始时间和持续时间。
(5)爆破结束后,回收传感器,将传感器中的SD卡拔出,停止记录数据。
3.3 数据处理
惯性传感器直接记录的数据为txt文本数据,需要通过预处理转化为Excel格式,保留三轴加速度(ax,ay,az)和三轴角速度(ωx,ωy,ωz)作为有用数据,在MATLAB软件读取数据通过程序运算后输出坐标信息,最后利用origin绘图软件绘制惯性传感器的三维空间轨迹和在3个坐标平面上的二维轨迹,具体如图6~图8所示。

图6 1号传感器空间运动轨迹Fig.6 Spatial motion trajectory of sensor 1

图7 2号传感器空间运动轨迹Fig.7 Spatial motion trajectory of sensor 2

图8 3号传感器空间运动轨迹Fig.8 Spatial motion trajectory of sensor 3
1号传感器运动轨迹如图6所示,整体为上抛后沿X轴正方向运动,最终沿X轴正方向的位移约为17.5 m,沿Y轴正方向的最大位移约为1.6 m,沿Z轴的运动为先向上运动3 m后,再向下运动约8.3 m,最终为向下运动约5.3 m。由于1号传感器属于最外排炮孔,距离边坡自由面最近,受到炸药爆破的冲击后,沿垂直于坡面方向的位移较大,沿边坡方向的位移较小。
2号传感器运动轨迹如图7所示,整体为上抛后沿Y轴负方向(沿边坡方向)运动和X轴正方向运动,沿Y轴负方向的位移约为4 m,沿X轴正方向的位移约为1.7 m,沿Z轴的运动为先向上运动3.4 m后,再向下运动10.4 m,最终为向下运动约7 m。由于2号传感器属于最外排炮孔,但是由于其外部存在爆堆,增加了炮孔到边坡的垂直距离,限制了矿岩在水平方向上的位移,在Y轴负方向接近地表的位置爆堆较少,受到炸药爆破的冲击后,在Y轴负方向产生了较大水平位移。
3号传感器运动轨迹如图8所示,整体为上抛后沿Y轴负方向(沿坡面方向)运动,沿X轴负方向的位移约为0.6m,沿Y轴负方向的位移约为2.4m,沿Z轴的运动为先向上运动5.3 m后,再向下运动6.8 m,最终为向下运动约1.5 m。由于3号传感器属于中间排炮孔,距离边坡自由面较远,距离地表的自由面较近,因此受到炸药爆破的冲击后,水平位移较小,上向位移较大呈隆起后下降状态。
4 矿岩运动规律分析
对3个传感器在各个方向上的位移进行统计,统计结果如表1所示。

表1 惯性传感器位移统计Table 1 Displacement statistics of inertial sensor m
对比1号和2号传感器,2个传感器均放置在最外排炮孔附近,相对于3号传感器,两者形态较为相近,均为上向位移较小,下向位移和水平位移较大,两者的主要区别在于1号传感器的水平位移远大于2号传感器且方向不同,1号传感器的水平位移小于2号传感器;对比1号和3号传感器,1号传感器的水平位移远大于3号传感器且位移方向不同,1号传感器的上向位移小于3号传感器,下向位移大于3号传感器;对比2和3号传感器,2号传感器的水平位移大于3号传感器且位移方向不同,2号传感器的上向位移小于3号传感器,下向位移远大于3号传感器,结合图4中爆破前的边坡三维模型和传感器的分布位置从水平位移大小、水平位移方向、上向位移大小和下向位移大小对爆破矿岩运动规律进行具体分析。
4.1 水平位移大小分析
(1)对比1号和2号传感器。2个传感器均位于最外排炮孔表面离边坡较近,但由于2号传感器所处位置外存在遗留爆堆增加了其与自由面之间的距离,在水平位移过程中受到的阻碍更大,因此1号传感器的水平位移远大2号传感器。
(2)对比1号和3号传感器。由于在1号传感器距离边坡自由面非常近,3号传感器处于爆区中间位置距离边坡自由面较远,因此在爆破过程中3号传感器受到的阻碍更大,1号传感器水平位移远大于3号传感器。
(3)对比2号和3号传感器。由于2号传感器与边坡自由面距离小于处于爆区中间的3号传感器,因此在爆破过程中3号受到的阻碍更大,2号传感器水平位移大于3号传感器;
4.2 水平位移方向分析
(1)对比1号和2号传感器。由于1号传感器距离自由面最近的方向为垂直于坡面的方向即X轴正方向,2号传感器距离自由面最近的方向为X轴正向和Y轴负向之间,且在2号传感器的右侧有炮孔存在,因此1号传感器沿X轴正向运动,2号传感器沿X轴正方向和Y轴负方向之间的方向运动。
(2)对比1号和3号传感器。由于1号传感器距离边坡自由面最近的方向为沿X轴正方向,因此主要运动方向为垂直边坡向外。而3号传感器由于其位置在爆区中间位置距离自由面较远,受其四周炮孔的影响,在水平方向上的位移具有一定的随机性,在Y轴的负方向和X轴负方向出现了少量位移。
(3)对比2号和3号传感器。由于2号传感器距离自由面最近的方向为X轴正向和Y轴负向之间,因此沿着该方向运动。而3号传感器由于其位置在爆区中间位置距离自由面较远,受其四周炮孔的影响,在水平方向上的位移具有一定的随机性,在Y轴的负方向和X轴负方向出现了少量位移。
4.3 上向位移大小分析
(1)对比1号和2号传感器。2个传感器均位于最外排炮孔表面离边坡较近,但由于1号传感器所在炮孔相对于2号距离自由面更近,炸药能量更多地作用于水平方向上,因此1号传感器上向位移略小于2号传感器。
(2)对比1号和3号传感器。由于1号传感器所在炮孔边坡为最近自由面,地表为较远自由面,炸药能量更多地作用于水平方向上,3号传感器所在炮孔地表为最近自由面,炸药能量更多作用于竖直方向,因此1号传感器上向位移小于3号传感器的上向位移。
(3)对比2号和3号传感器。由于2号传感器所在炮孔边坡为最近自由面,炸药能量更多地作用于水平方向上,3号传感器所在炮孔地表为最近自由面,炸药能量更多作用于竖直方向,因此2号传感器上向位移小于3号传感器。
4.4 下向位移大小分析
(1)对比1号和2号传感器。由于1号传感器所处位置的边坡高度小于2号传感器所处位置的边坡高度,因此2号传感器有更大的下降空间,下向位移更大。
(2)对比1号和3号传感器。由于1号传感器所在位置距离边坡很近且边坡具有一定高度,上抛后具有较大的下降空间,3号传感器处于爆区中间位置,距离边坡较远且附近全是矿岩,上抛后没有更多的下降空间,因此1号传感器的下向位移大于3号传感器的下向位移。
(3)对比2号和3号传感器。由于2号传感器所在位置距离边坡很近且边坡高度较大,上抛后具有较大的下降空间,3号传感器处于爆破中间上抛后没有更多的下降空间,因此2号传感器的下向位移远大于3号传感器的下向位移。
4.5 小 结
在压渣爆破过程中矿岩整体会产生一个向上隆起后下落的过程,隆起高度约为3~5 m,在隆起的过程中伴随着水平位移,不同位置矿岩石水平位移大小不同,具体规律如下:
(1)越靠近边坡自由面的炮孔附近的矿岩水平位移越大,其中最外排炮孔附近的矿岩的飞行距离约17.5m,内排炮孔附近的矿岩水平位移较小且方向具有不确定性。
(2)当边坡外侧存在爆堆时,其周边炮孔附近的矿岩水平位移会受到较大限制并且位移方向会朝着最近自由面的方向,隆起高度会有所增加。
(3)采区中间炮孔附近的矿岩在爆破过程中主要产生较大的上向位移,并且由于下方空间有限和距离边坡自由面较远,下向位移和水平位移较小。
5 结 论
基于惯性导航技术突破了露天矿爆破过程中岩石运动轨迹难以精准获取的技术瓶颈,在惯性导航解算原理的基础上利用惯性传感器获取了齐大山铁矿采区在压渣爆破过程中不同位置的矿岩的空间运动轨迹,并通过对比分析各个位置的传感器运动轨迹特征得出了压渣爆破过程中的矿岩运动规律,主要结论如下:
(1)创新性地提出了采用高精度MEMS惯性导航传感器采集数据生成矿岩运动轨迹的露天矿爆破矿岩运动规律研究方法。
(2)基于惯性导航技术对爆破过程中矿岩运动轨迹的生成算法进行了研究,并将该算法在MATLAB中转化为计算机语言。
(3)通过将矿岩运动轨迹与爆破高清录像和爆破前后三维模型进行对比,得出利用高精度惯性传感器方法生成的矿岩轨迹较为准确和真实,能够很好地反映爆破过程中矿岩真实运动过程。
(4)以齐大山铁矿-105 m采区水平为例,在压渣爆破过程中矿岩整体会呈现出隆起后下落的过程,期间伴随着水平位移,水平位移方向为朝着最近自由面的方向,其中越靠近边坡位置的矿岩水平位移越大,隆起高度越低,距离边坡位置越远的矿岩水平位移越小,隆起高度越高。
(5)利用本方法获取的矿岩运动轨迹不仅适用于爆破过程中矿岩运动规律研究,也同样适用于其他有关露天矿爆破的研究领域如爆破安全飞石监测和爆破效果评价等,本方法应用前景广泛,亟待进一步深入研究。