直升机变稳性能计算及变稳控制律设计
2022-04-26屈天祥傅春啸盛守照
滕 飞,屈天祥,傅春啸,雍 和,盛守照
(南京航空航天大学自动化学院,江苏 南京 211100)
0 引言
直升机变稳技术[1]又被称为空中飞行模拟,即利用控制算法使原型直升机获得与目标直升机相同的操纵稳定性,真实反应目标直升机所在的环境。这项技术主要在直升机飞行品质的研究、新型直升机的研制以及试飞员的培训中有着广泛的应用。
自从变稳概念被提出以来,各国对变稳直升机开展了大量的研制与应用工作。目前,各大飞行模拟强国均拥有自己的变稳直升机,如美国的Learjeth和CH-46C变稳直升机[2],法国的“隼”20变稳直升机,加拿大的Bell205A、Bell412变稳直升机[3]等。我国在固定翼变稳飞机方面已经实现了从单轴到三轴的突破,但针对变稳直升机的研究起步较晚,目前仍处于方法论证阶段。
本文以黑鹰直升机作为研究对象,通过定义直升机变稳性能指标来确定变稳过程中的非失真许可范围,衡量直升机的变稳能力。针对在使用经典控制设计过程中,需要实时根据直升机飞行状态进行变稳控制参数调整的问题,综合响应反馈[4]和模型跟随[5]的优点设计了变稳控制律,并对该变稳控制律的可行性和有效性进行仿真验证。
1 直升机变稳能力分析
变稳直升机通常是在已经成熟稳定的直升机平台上,进行一定改装以实现对被模拟直升机各通道的全面匹配,因此,原型直升机平台各通道能够模拟的非失真许可范围是需要重点考虑的对象。
1.1 相对变稳能力
本文通过定义直升机变稳性能指标来确定变稳直升机的非失真许可范围,变稳性能指标Pϑ为
(1)
以样例直升机的俯仰通道为例,在相同的操纵杆位移输入δ=30 mm下,采用极点配置法[6]对直升机在不同阻尼和自然频率下的变稳性能指标进行仿真,比较不同前飞速度时样例直升机的变稳能力,如图1~图3所示。

图1 悬停状态下俯仰通道变稳性能指标

图2 30 km/h前飞状态下俯仰通道变稳性能指标

图3 120 km/h前飞状态下俯仰通道变稳性能指标
对图1~图3进行横向对比可知,样例直升机处于悬停、低速前飞和高速前飞状态下俯仰通道的变稳能力均随阻尼的增大和自然频率的降低而增大,当自然频率取值较大时,无论阻尼取何值,直升机的变稳性能指标均接近于0。 而当阻尼取值较小而自然频率较大时,变稳性能指标变得不稳定。通过纵向对比可知,对于同等大小的阻尼和自然频率,低速前飞和悬停状态下的变稳能力相差不大,但是在高速前飞时样例直升机的变稳能力有所下降。
1.2 绝对变稳能力
直升机的变稳能力受直升机操纵输入权限以及实际姿态角调节范围的影响,以样例直升机为例,通过数字仿真实验得到,其在不同阻尼比(0.25,0.95)和自然振荡频率(0.4,4.8)下可施加的最大杆量及各杆量下的最大姿态角,具体如表1所示。
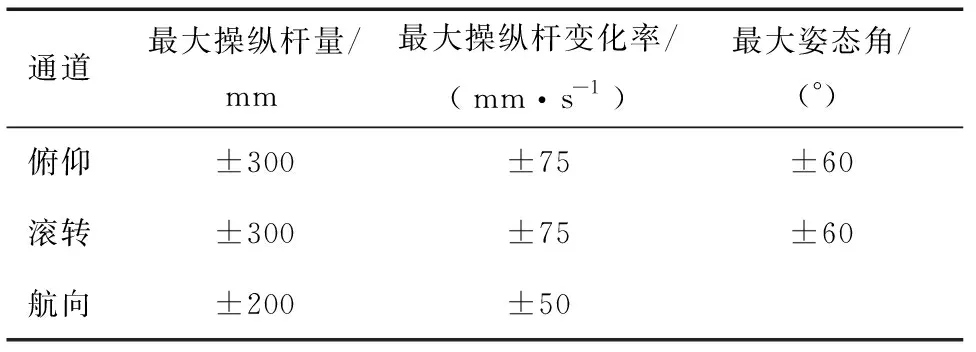
表1 限制条件
以样例直升机俯仰通道为例,针对不同阻尼和自然频率下的最大杆量及最大姿态角的算法策略如下:
a.对样例直升机状态量进行初始化,将俯仰通道杆量Le、滚转通道杆量La以及航向通道杆量LT置为0。设定俯仰通道阻尼ζ为0.25,自然频率ωn为0.4。


图4 直升机俯仰通道变稳能力计算流程
样例直升机俯仰通道杆量行程随着自然频率的增加而增加,如图5所示;样例直升机姿态角变化范围随着自然频率的增大而减小,如图6所示。因此,直升机的操纵效率在自然频率增加到一定范围时会有所下降,故当自然频率在0.4~3范围内、阻尼比在0.25~1之间变化时,直升机具有较好的变稳性能。
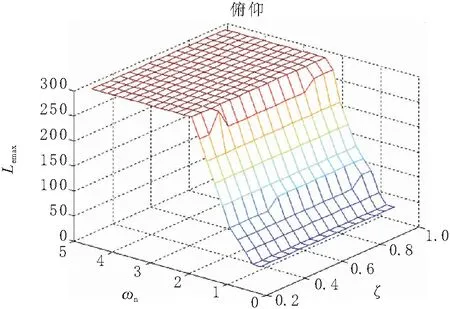
图5 样例直升机俯仰通道各阻尼和自然频率下俯仰操纵杆最大许可行程

图6 样例直升机俯仰通道各阻尼和自然频率下最大峰值俯仰角
2 直升机变稳控制律设计
直升机变稳实质上是使用相应的变稳控制算法,使原型直升机具有目标直升机的操稳特性。为满足变稳控制中跟踪精度和系统稳定裕度等要求,针对直升机悬停状态,本文综合考虑响应反馈原理以及模型跟随原理设计如图7所示的变稳控制律,可分为内外2个回路。
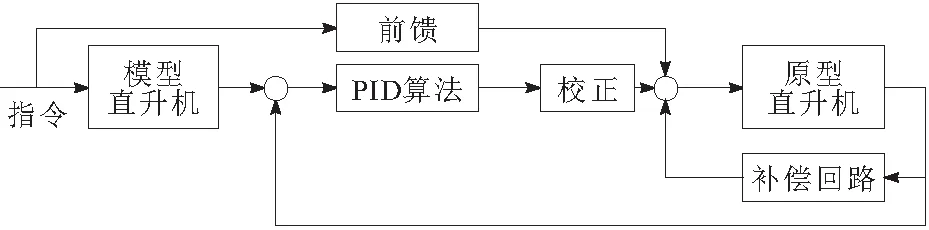
图7 综合模型跟随原理
内回路用于匹配直升机模型短周期特性,对于变稳直升机,其中补偿回路相当于阻尼器调节其阻尼特性,可以改善变稳直升机飞行品质,主要通过反馈角速率信号使系统形成闭环回路,原型直升机与目标直升机的短周期频率阻尼特性尽量相逼近。变稳直升机高度通道主要反馈垂向速度信号,横向通道主要反馈滚转角速率信号,纵向通道主要反馈俯仰角速率信号,航向通道主要反馈偏航角速率信号。
在确定补偿回路参数后,通过调节外回路参数以满足系统要求的跟踪精度。在俯仰、滚转和航向通道对角度以及角速率展开跟踪,同时在直升机高度通道展开垂向速率以及高度的跟踪,可较精准跟随模型直升机响应。对应的,滚转、俯仰和航向的跟踪环主要结合了相应角位置的PI控制、角速率的PI控制以及校正网络和主增益控制。而高度跟踪环主要结合了高度的PI控制、垂向速率的PI控制以及校正网络和主增益。对各个通道误差信号的PI控制,可以提高快捷性的同时消除系统的稳态误差,对模型直升机的跟踪性能也很大程度加强。而超前校正环节可以增加控制系统的稳定裕度和截止频率,并且系统的瞬态响应性能以及稳定性都有所改善。
变稳直升机纵向通道控制如图8所示,该通道中补偿回路由前馈信号δe以及反馈信号ωy组成。外回路采用俯仰角及俯仰角速率双闭环PI控制结构以及一阶超前校正环节组成,有效提高回路的阻尼特性和跟踪精度。横、航向以及高度通道的控制律设计与纵向类似,不再赘述。

图8 变稳直升机模型跟随纵向通道控制
3 仿真实验
ADS-33E-PRF飞行品质规范[7]对直升机各通道的响应特性和稳定性等做出了具体要求,本文根据ADS-33E-PRF飞行品质规范对前飞状态下直升机I级操纵品质的要求确定阻尼和自然频率,设计各通道目标模型,具体理想模型如表2所示。

表2 模型机各通道I级理想模型
原型机和模型机的俯仰、滚转和偏航通道的数字仿真结果如图9~图14所示,图中实线部分为原型直升机的试飞曲线,虚线部分为模型直升机的响应曲线。仿真结果表明,原型机对模型机的跟踪误差在5% 以内, 该控制律能够在各通道实现跟踪精度要求;其中角速率变化属于短周期响应,比姿态角变化要快,其跟踪精度比姿态跟踪精度要略差一些,为了获得更好的跟随性能,考虑直升机气动参数的不确定性,可以在之后的研究中加入自适应控制技术。
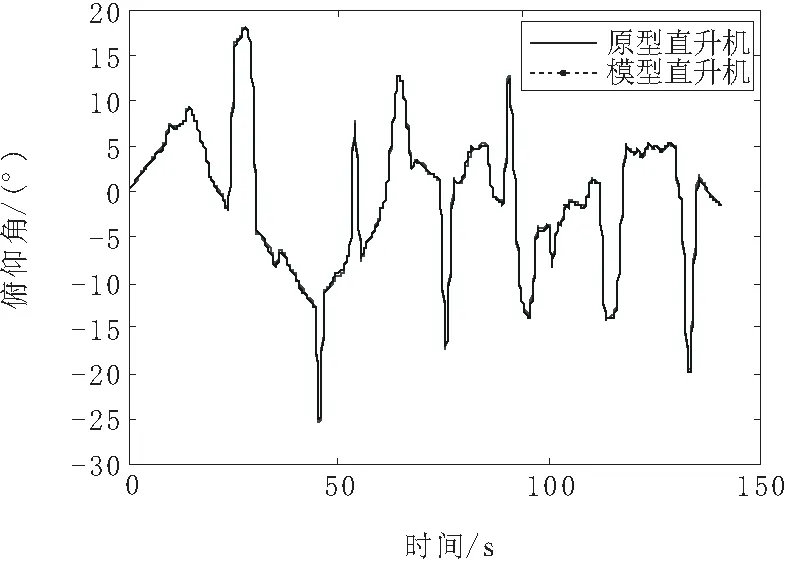
图9 变稳控制俯仰角比较曲线

图10 变稳控制俯仰角速率比较曲线

图11 变稳控制滚转角比较曲线

图12 变稳控制滚转角速率比较曲线

图13 变稳控制偏航角比较曲线

图14 变稳控制偏航角速率比较曲线
4 结束语
本文主要对直升机的变稳能力以及变稳控制策略开展研究,针对相对变稳能力,为衡量操纵使直升机产生变稳机动响应过程中的非失真许可范围,在相同操纵杆位移输入下,通过数字仿真实验计算不同阻尼和自然频率下各通道的响应;针对绝对变稳能力,在操纵位移输入下根据各通道响应情形仿真计算的变稳性能指标。针对变稳控制策略,本文基于响应反馈法和模型跟踪法进行控制律的设计,分别设计内外2个回路,内回路匹配模型短周期特性,外回路模型跟踪系统主回路,通过调整比例系数使跟踪误差满足要求。
