基于短基线传感器阵列的炮弹被动测向算法
2022-04-26屈秉男蒋平赵鲁阳李凤荣王营冠
屈秉男,蒋平,3,赵鲁阳,李凤荣,王营冠
1. 中国科学院 上海微系统与信息技术研究所 中国科学院无线传感网与通信重点实验室,上海 201800 2. 中国科学院大学,北京 100049 3. 上海科技大学 信息科学与技术学院,上海 201210
随着传感技术、计算机技术、通信技术的发展,无线传感网络(Wireless Sensor Networks, WSN)已广泛应用于交通、安防、智能家居、环境监测、军事等领域。在军事领域,因其监测范围广、探测精度高、成本低等优势,基于WSN的被动探测系统成为战场态势感知的重要手段。其中,炮弹的落点位置信息是评估战场毁伤效果的一项重要参数。为此,在采用加速度传感器对炮弹爆炸产生的地震动信号进行采集的基础上,对其进行有效滤波及特征分析等处理,基于地震动信号到达时间差(Time Difference of Arrival, TDOA)算法及地震动波达方向角估计(Direction of Arrival, DOA)算法构建的炮弹落点位置定位方法成为现阶段研究的热点。
文献[11]在深入剖析炮弹发射、飞行及爆炸激励而成的声震和微震信号特征基础上,提出发射和飞行过程中的噪声信号滤除算法,进而实现炮弹爆炸的声震信号和微震信号精准识别,并通过迭代方程构建定位模型实现炮弹爆炸高准度定位,该研究成果也为基于TDOA的炮弹落点位置定位方法构建提供了高精准的数据流。为了提升手机通信系统在室内定位能力,文献[12]构建基于Chan算法的TDOA及到达时间(Time of Arrival, TOA)测量的闭式定位算法,为求解信号与传感器的时延双曲线关系式提供了理论支撑。文献[13]提出一个统一定位模型,并利用高斯-牛顿迭代和半定松弛给出该模型极大似然估计,证明待测目标源范围为近场、远场或是其中对其无影响,为后续学者的深入研究奠定了深厚的理论基础。与此同时,针对TDOA模型下多解问题,文献[14]提出TDOA解的分类方法:相同原点时间的解与不同起源时间的解;并推导与分析了2种解状况下传感器排布的约束条件,包括大规模排列及线性排列等,为后续相关研究工作提供了应用实践指导。为提升定位算法模型在随机噪声影响下的稳定性,文献[15]挖掘基于TDOA模型下的约束加权最小二乘问题的非凸性,将其转化为凸优化问题,推导出一种有效求解全局解的原对偶内点算法,有效避免了在定位几何形状不理想时的病态条件问题。2019年,Zheng等针对加权最小二乘问题(Weighted Least Squares, WLS)的非凸性质,利用半定规划(Semi Definite Programming, SDP)将WLS问题转化为凸优化问题,利用SDP和重构线性化技术(Reformulation-Linearization Technique, RLT)设计新的局部化解,进而提升噪声水平较高状况下的定位性能,同时更加适用于传感器位置及速度存在误差的情况。另外,为解决基于TDOA和频差(Frequency Difference of Arriva, FDOA)测量方程的非线性问题,文献[17]采用双迭代交替计算震源位置和速度,并且证明了该方法的收敛性,通过对其效率进行理论分析及与现有方法对比仿真,验证了算法的高效性和定位精确度。文献[18]使用2个观测站的TDOA和到达角估计(Angle of Arrival, AOA)混合测量,构造混合测量值和未知源位置间的新关系,提出了一种简单的封闭解方法,该方法可以推广至2个以上观测站,且验证了其克拉美罗性能。2019年,Ho等为解决远场定位中双曲线相交出现阈值效应的问题,提出使用目标在修正极坐标表示 (Modified Polar Representation, MPR) 中的角度信息,构造一种包含点定位及DOA估计的新型测量问题表示方法,并通过非线性变换和约束提高精度,同时仿真验证该代数闭式解方法在高斯噪声下具有克拉美罗下界(CRLB)性能。此外,炮弹爆破激励而成的声震信号捕捉分析同样是实现高精度定位估计的重要内容, Li等在对地震信号历史波形的特征分析中,提出基于特征频率的光谱能量、经验模态分解(Empirical Mode Decomposition, EMD)得到的信号分量能量、短期和长期功率平均(Short-Term and Long-Term Power Averages, STA/LTA)的峰值和比值构建联合概率模型,有效实现地震信号的检测及处理,并为地震信号的相关应用研究提供了有效的信号处理方法。
然而,在基于地震动信号定位应用场景中, 基于TDOA与DOA算法构建的炮弹落点位置定位方法还有一些亟需解决的问题。野外战场广域环境下,地震动信号传播速度及成分衰减特性受到地质结构的影响,波速和时延非线性方程解很难准确估计,导致结果难以收敛。另外在大规模广域探测系统进行被动探测定位时,传感器阵列难以做到严格的时钟同步。
针对以上问题,本文提出在野外布设短基线传感器阵列,该传感器阵列采用四元十字地震动传感器排布,对角传感器间距控制为10 m,远小于远场炮弹地震动信号传播距离,有效保证信号传播介质的一致性,易于实现传感器阵列的时钟同步,同时便于现代战场探测系统的快速部署。
本文针对以上短基线传感器阵列,提出一种适用于该阵列的高精度测向方法。首先对炮弹爆破产生的地震波信号进行采集及特性分析,提出基于EMD及短时能量特性联合分析的瑞雷波提取方法,对其进行阵列间互相关得到高精度时延估计。在此基础之上,提出基于四元十字短基线传感器阵列的被动测向方法,该方法测向结果不受信号波速估计值的影响,有效避免波速估计误差对测向结果的影响。经模拟仿真及真实炮弹爆破验证本文算法模型,证实本文算法具有较低的计算复杂度,且测向角度偏差维持在1°左右。
本文的主要贡献包括:
1) 提出基于EMD及短时能量特性联合分析的瑞雷波提取方法,实现高精度到达时延获取。
2) 提出基于四元十字短基线传感器阵列的免受波速估计值影响的目标被动测向方法(Direction Finding Algorithm Without Velocity, DFA-WV),实现高精准的测向服务。
3) 模拟仿真与真实靶场实地试验相结合,迭代完善本文算法模型并验证其有效性。
本文的组织架构如下:本节介绍了炮弹目标落点的被动探测技术背景及研究现状,简要介绍本文工作;第1节简要介绍本文提出的四元十字短基线传感器阵列测向算法模型;第2节在系统分析实际战场环境下炮弹地震动信号及其特性基础上,提出基于EMD及短时能量特性联合分析的瑞雷波提取预处理方法;第3节提出基于四元十字短基线传感器阵列的DFA-WV算法;第4节通过数值仿真及实弹测向对比分析瑞雷波提取对时延精度的影响,及不同算法的测向精度及稳定性分析;第5节总结全文。
1 短基线传感器阵列测向算法模型
本文提出的基于四元十字短基线传感器阵列的炮弹目标被动测向系统主要包括地震动信号采集、信号预处理及瑞雷波提取、瑞雷波DFA-WV测向3部分,算法流程见图1。
如图1所示,本文提出的基于短基线传感器阵列的炮弹被动测向方法中,首先进行炮弹爆破激励的地震波信号的采集处理,利用在靶场中布设的四元十字短基线传感器阵列进行地震波阵列信号采集。
信号预处理及瑞雷波提取流程包括:对地震波信号进行成分分析及EMD分解去噪处理,进而通过信号的短时能量特性提取出瑞雷波信号。

图1 基于短基线传感器阵列的炮弹被动测向方法流程图Fig.1 Flow chart of passive direction finding method for shells based on short baseline sensor array
瑞雷波DFA-WV测向算法流程包括:在对瑞雷波进行精准抽取的基础上,对阵列间瑞雷波信号进行联合互相关计算得到精准的到达时延估计,阵列时延作为算法参数进行DFA-WV算法测向,得到不受波速估计值影响的炮弹目标被动测向估计。
最后本文通过数值仿真及实弹试验验证本文测向算法的有效性。此外,本文通过对比瑞雷波提取前后对时延估计精度的影响,以及对比本文DFA-WV算法与Chan算法及改进MPR算法的测向性能及算法复杂度,验证分析本文基于四元十字短基线传感器阵列的DFA-WV算法的测向精度及工程应用可行性。
2 地震动信号分析及预处理
2.1 爆破地震动信号成分分析
炮弹剧烈爆炸在地表激励而成的地震动信号与地震波信号相似,主要由体波和面波构成。体波通常由地表向地下深处传播,包括横波(S波)和纵波(P波)。S波的传播方向与介质质点振动方向垂直;P波传播方向与质点的振动方向一致,P波与S波在传播过程中相互独立,遇到界面会发生反射和折射。面波在介质分界面传播,是频率较低、能量较强的次声波,由体波之间发生相关干涉及叠加产生,主要沿地表介质传播,其能量随地面深度的增加而呈指数幂剧减,主要分为瑞雷波和勒夫波。瑞雷波频率在均匀介质中不受波速影响,不产生频散效应,且在相同介质下传播速度相同。勒夫波传播方向与质点振动方向垂直,只存在横向分量运动,在其传播过程中容易发生频散现象。根据以上分析可知,在实际战场中,地震动传感器可以准确检测到的地震动信号包含纵波、横波、瑞雷波,图2为靶场炮弹试验中传感器采集到的真实炮弹爆炸激励的地震波波形及其成分分析。
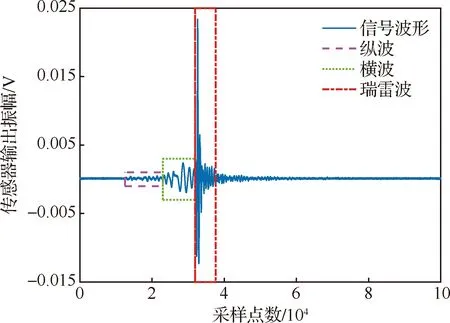
图2 炮弹爆炸激励的地震波波形及成分Fig.2 Seismic wave waveform and composition stimulated by shell explosion
参考地震波各成分波传播速度特性,可知传感器接收到的地震波成分依次为:纵波、横波及瑞雷波。对应图2波形及文献[21]可知,瑞雷波幅值特性明显,且能量占比最高可达总能量的67%左右,与此同时,本文对靶场炮弹试验引发的实际地震波信号频域特性做了进一步分析,如图3所示。
从图3可知,实际战场所采集的炮弹激励地震波频率主要分布在0~120 Hz范围内。体波主频集中在10~30 Hz,且纵波频谱存在大量低频噪声,同比可见,瑞雷波主频集中在30~50 Hz。与体波特性相比,瑞雷波具有更突出的频率分布特性,从图2与图3中可以看出瑞雷波幅值特性较体波更为明显。由此可见,瑞雷波的采集与提取将更适用于低成本的采样电路及传感设备,为本文提出的战场快速部署的高精度探测系统的应用实现奠定基础。
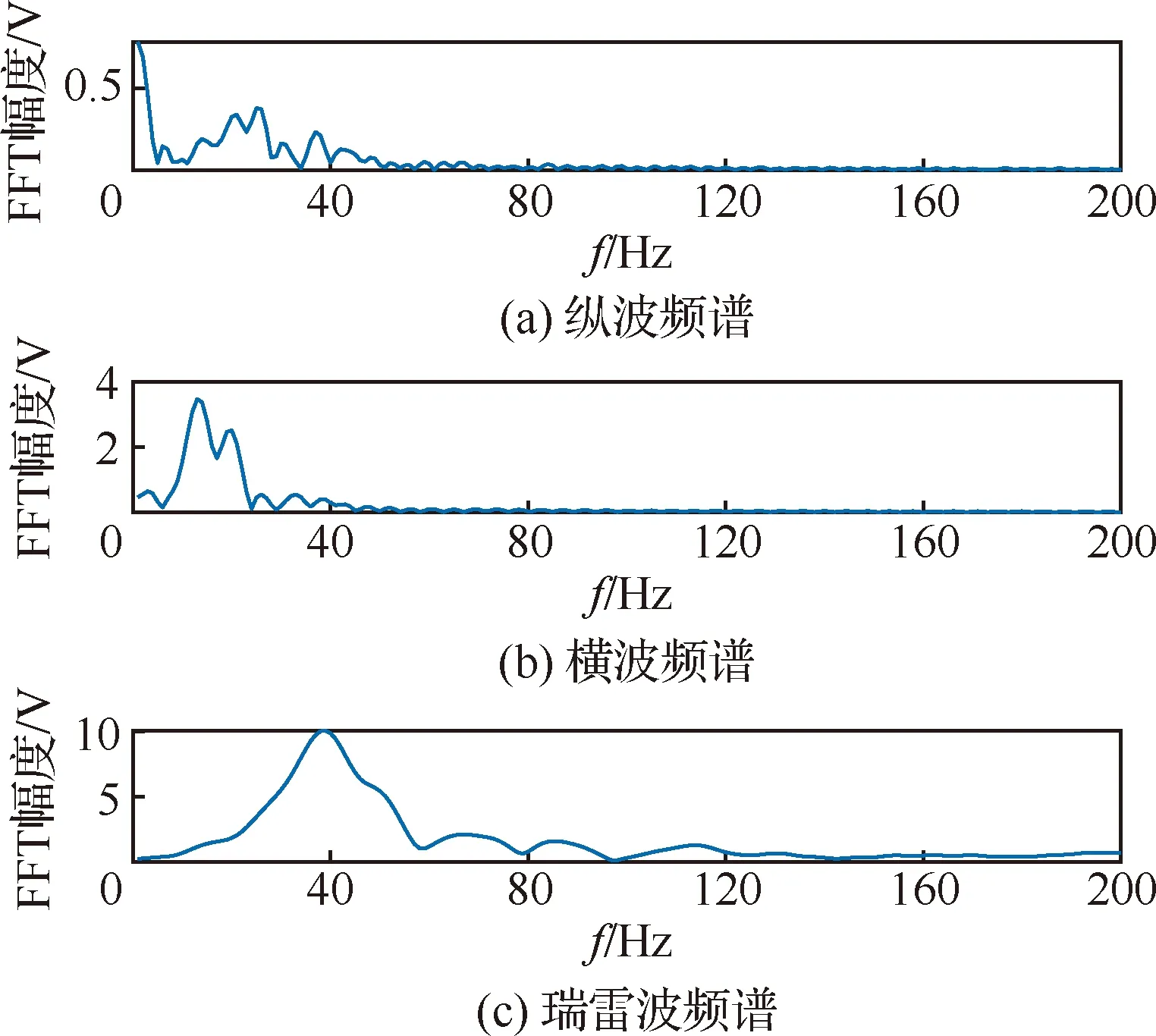
图3 实际地震波各成分波频谱图Fig.3 Frequency spectrum of each component of actual seismic wave
2.2 基于EMD的地震波信号预处理
由2.1节爆破地震波成分分析及文献[21]可知,炮弹在地面爆炸后产生的地震动信号成分复杂,呈现出非平稳、非线性、稀疏性等特点,且部分成分存在频散效应。为了提升定位算法的鲁棒性,需要对信号进行降噪处理,常用的信号降噪方法有傅里叶变换、小波分解等。傅里叶变换后会丢失时域信息,不便于提取特定成分波的到达时刻;小波变换需事先给定基函数,依赖于信号先验知识,适用于信号与噪声频带相互分离的确定性噪声的分解去噪,因此不适用于本文地震动信号的处理。
为解决上述问题,本文采用EMD对地震动信号进行预处理。EMD根据信号局部特点,将其分解为若干反映内部特征的固有模态函数(Intrinsic Mode Function, IMF),IMF包含信号不同尺度上的特征信息,依赖于信号本身而非特定基函数,与小波变换有明显的区分。
在炮弹落点测向应用场景中,设传感器节点接收到信号为(),拟合出()的极大值点包络()、极小值包络()、包络均值()表示为
()=(()+())2
(1)
之后,从原始信号中分离该包络均值,得到信号(),并对该信号进行IMF判别,为了实现信号特征的自适应分解,EMD算法通过迭代不断地消除信号包络均值,具体的算法流程如图4所示。
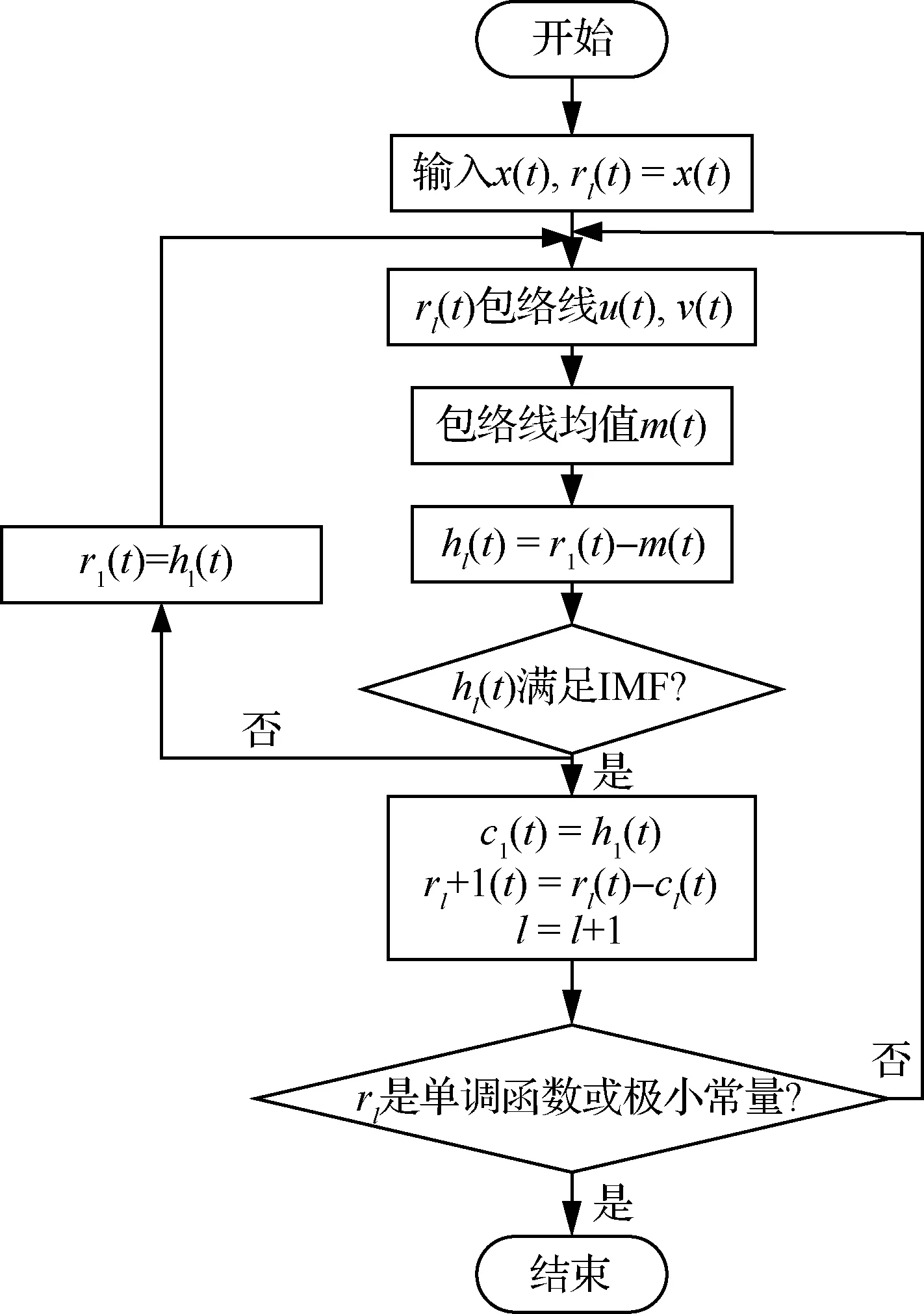
图4 EMD分解地震动信号算法框图Fig.4 Block diagram of EMD decomposition ground motion signal algorithm
如图4所示,通过不断分解信号自身包络均值,对其进行IMF判别实现自适应分解。可见EMD不需要基函数的预设,仅依靠信号时间尺度特征进行分解,分解后的函数可以重构原信号,可以表示为

(2)
式中:()为满足条件的IMF分量;()为分解后的残余分量。
2.3 基于短时能量特征提取瑞雷波
由2.1节分析可知,地震动信号包含多个不同频率和波速的成分波,同时瑞雷波在传播过程会出现频散效应,这使得各成分波程差对信号互相关时延估计产生较大误差。考虑到从属于体波范畴的瑞雷波频散效应低且不受波速影响,因此基于瑞雷波特性构建的炮弹落点位置定位方法更具高鲁棒性。为此,本文首先对瑞雷波进行有效提取。
首先对地震波信号进行加窗和分帧处理,可表示为
()=()((-1)+)
1≤≤, 1≤≤
(3)

(4)
式中:()选择汉宁窗函数;(·)为地震动时域信号;为帧移长度;为帧长;为分帧后的总帧数。第帧的短时能量()可以表示为

(5)
为了消除传感器增益和灵敏度误差,本文对各路地震动信号进行短时能量的归一化,归一化后的能量序列用()表示,进而对该能量序列进行差分计算。
()-(-1)≥1<≤
(6)
式中:为能量差分门限,即地震动信号的能量状态变化值。通过对实测外场中多发炮弹震动信号中的不同成分波进行特征学习,得到符合该外场中瑞雷波能量特征的差分门限。信号的短时能量变化达到该门限的时刻即为提取瑞雷波的起始时刻。
3 算法介绍
3.1 时延双曲线定位模型
本文将参考基于时延的双曲线定位模型,利用信号到达各传感器的时间延迟、传感器阵列坐标等关系,提出四元十字短基线测向阵的炮弹目标被动测向方法,进而得到目标的高精度方向角信息。
双曲线定位模型由信号时延及传感器位置坐标关系建立,例如给定一个三元传感器阵列,可建立方程组为
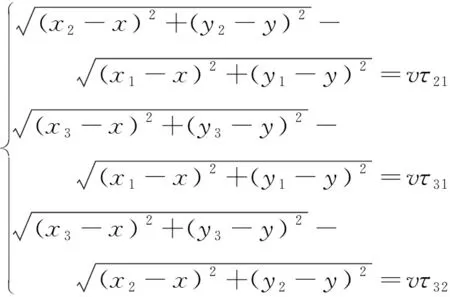
(7)
式中:(,)、(,)、(,)分别为3处传感器位置坐标;(,)为未知量,表示目标估计位置坐标;为信号传播速度;、、为信号到达各传感器间的时间延迟。具体定位模型见图5。
由图5可知,任意2个传感器间的信号到达时延可以建立一个双曲线方程,传感器阵列组成的双曲线方程的交点即为目标估计位置,由式(7)可知信号到达时延及其传播速度的估计精度对方程求解影响较大。
图5 TDOA时延双曲线定位模型Fig.5 TDOA delay hyperbola positioning model
3.2 基于瑞雷波信号的阵列互相关时延估计
时延估计精度为影响测向结果的原因之一,考虑到瑞雷波频散效应低且不受波速影响等特性,本文在有效抽取炮弹爆炸激励而成的瑞雷波特性的基础上,实现地震波波到达时延计算。
多路传感器单元接收到的瑞雷波信号可表示为
()=()+()
≤≤,1≤≤
(8)
式中:()为短基线传感器阵列中第个传感器单元截取出的含有瑞雷波的信号;()为瑞雷波信号;()为噪声信号;、为3.3节中检测到瑞雷波起始时刻;为采样率;为基站中传感器单元数。
对2个单元离散信号进行互相关计算:
1,()=[()(-)]
(9)
式中:[·]为数学期望;为信号间延迟点数,互相关函数1,()还可表示为
1,()=1()+1()+1()+1()
(10)
假设噪声是随机的,且与信号相互独立,可以忽略二者相关性,互相关函数可以写成

(11)
根据相关函数性质,可知当=时相关性最大,因此信号延迟点数为

(12)
式中:arg{·}为函数自变量,max[·]为函数最大值,转换为对应时刻即得到瑞雷波到达时延。
3.3 四元十字短基线传感器阵列DFA-WV模型
在适于战场演练炮弹投射的环境下,炮弹爆破激励的瑞雷波信号在地表传播过程中基本不出现速度衰减情况,但复杂的地质结构导致难以构造精准的瑞雷波速度模型,波速估计产生的误差会直接影响目标位置的估计精度。
在目前主流的目标定位及测向算法应用中,Chan算法及改进MPR算法等为得到目标源信号在试验场地的传播速度估计,通常使用多个目标源到达时延及实际距离差计算信号波速,波速计算公式为


(13)

为了避免信号波速及时延估计偏差对定位及测向算法的影响,本文在震动源信号特性分析基础上,以及瑞雷波到达短基线传感器阵列的时延估计参数的驱动下,构建双曲线定位方程组模型。基于此模型,提出一种短基线传感器阵列目标被动测向模型,并应用在四元十字阵列结构中,以期免除波速估计对测向结果的影响,实现高精度目标被动测向。

按照2.3节中瑞雷波到达时刻,选取最先检测到瑞雷波信号的传感器单元作为参考传感器单元,依据3.2节计算出目标瑞雷波信号到达任一传感器单元与参考传感器单元的时延记为,目标距各传感器节点的距离分别为,=1,2,3,4,时延双曲线模型表示为
图6 短基线测向阵列示意图Fig.6 Schematic diagram of short baseline direction finding array

-=
(14)
式中:(,)分别对应上述传感器坐标,这里为假设的瑞雷波波速。根据文献[20]可知,瑞雷波波速在相同介质内传播速度一定,因此这里瑞雷波波速可以用同一速度表示。
由式(14)移项后平方可得:
(15)
同样有:
(16)
用式(15)和式(16)消除,并代入坐标关系:



(17)
可以将式(17)写为矩阵形式:
+=-
(18)
式中:

(19)
(20)

(21)

式(15)、式(16)已有2个传感器数据加入消元计算,因此剩余传感器时延及坐标关系可构成矩阵方程:
(22)
将短基线测向站中的阵元位置信息代入式(19)~式(21)中求得对应参数为
(23)
(24)
通过线性变换将、、、中速度参数变换至、中且其系数相同,两式相减可以直接消除波速参数得如下形式:
(-)+(-)=0
(25)
式中:系数、分别为

(26)
可见参数、仅与时延及传感器阵列参数有关,与波速无关。目标与短基线阵列中心的入射角度结果为

(27)
式中:为目标相对短基线测向站中心的角度,显然测向结果与波速无关,即目标相对短基线测向基站中心点所成的入射角与波速无关。
根据上述理论推算可知,本文提出的DFA-WV算法,依托四元十字短基线传感器阵列,实现无需信号波速估计的目标实时探测测向系统,能有效适用于普遍未知地质结构的战场环境,同时短基线测向阵具有部署便捷的特点,易于工程应用实现。
4 仿真及实弹试验验证分析
4.1 试验靶场条件基础
为了验证本文提出的DFA-WV算法与测向系统的有效性与科学性,最后选择真实的靶场进行实弹爆炸测向精准性测试。试验中靶场环境及爆破实况如图7所示。

图7 试验靶场及爆破实况Fig.7 Test range and actual blasting
如图7所示,试验靶场为800 m×800 m的戈壁平坦空地,试验当天室外温度12~15 ℃,风速为东风2.5~4 m/s。
短基线测向探测系统包括四元十字地震动传感器阵列、采集卡、算法处理器和光纤数根,短基线测向探测系统示意图如图8所示。
如图8所示,地震动传感器阵列采用四元十字阵排布,阵列对角直径为。每个传感器单元的经纬度由载波相位差分技术(Real-Time Kinematic, RTK)定位测得,进而转换至靶场物理坐标。这里测得实际四元十字短基线传感器阵列单元坐标分别为(97.654 5,94.974 5) m、(97.654 5,102.045 5) m、(104.725 5,102.045 5) m、(104.725 5,94.974 5) m,阵列对角直径=10 m,阵列中心点坐标为(101.19,98.51) m。
本次爆破试验选取5个位置点作为炮弹爆破位置。以阵列中心点为坐标原点建立坐标系,按照地理正东方向建立轴,地理正北方向建立轴,测向角度统一按照与正北方向(轴)夹角计算,测向范围为-轴正方向。炮弹坐标及相对短基线阵元中心的角度见表1所示,靶场中炮弹落点位置示意图如图9所示。
图8 短基线测向站系统示意图Fig.8 Schematic diagram of short baseline direction finding station system

表1 爆破点坐标及相对测向站角度

图9 靶场中炮弹落点位置示意图Fig.9 Schematic diagram of drop point of shell in shooting range
参考靶场爆破任务要求,在这5个爆破点分别进行3、18、15、3、3次爆破,共计爆破炸弹42发,短基线测向阵列接收目标地震动信号进行算法分析。
4.2 提取瑞雷波对时延精度的影响
4.2.1 时延误差对测向精度的影响
考虑到时延精度是影响算法测向结果的直接要素,首先采用数值仿真分析时延误差对算法测向结果的作用曲线。模拟实验环境参照4.1节四元十字短基线传感器阵列布设,阵列对角直径设为10 m,仿真目标参照实际爆破点入射角度,对其进行不同时延误差量级下的算法测向精度仿真,时延误差对测向精度的影响如图10所示。
在该仿真环境下,四元十字短基线传感器阵列中心点坐标取[0,0],各传感器坐标分别为=[-3535 5,-3535 5]m,=[3535 5,-3535 5]m,=[3535 5,3535 5]m,=[-3535 5,3535 5]m。仿真目标相对阵列中心的角度参照表1中5号爆破点的入射角度,便于后续对比分析,每处源位置在不同时延误差量级下迭代计算1 000次。
图10 时延误差对测向精度RMSE的影响Fig.10 Influence of time delay error on RMSE of direction finding accuracy
如图10所示,在不同的目标入射角仿真实验中,算法测向精度随时延误差的增大出现明显下降。在入射角度为76.302 4°时,算法测向精度对时延误差要求最高,伴随时延误差的增加,算法测向RMSE性能出现相对明显的下降。然而,当时延误差为1 ms量级以内,算法测向误差仅控制在3°以下,若考虑实际应用场景,需将算法测向RMSE误差稳定在1°以内的情况,对应图10可知时延误差应控制在0.3 ms量级。与此同时,算法测向均方根误差由0°扩大至0.5°时,允许的时延误差变化范围约为0.1 ms,当均方根误差由0.5° 升至1°时,允许的时延误差变化范围仅约为0.02 ms,可见在均方根误差达到一定值后,微小的时延误差可对算法测向精度造成较大影响。由此可知,控制时延估计误差可有效提升算法测向精度及稳定性。
4.2.2 实弹试验中瑞雷波提取对测向精度的影响
为了验证本文提出的基于瑞雷波特征分析的提取算法,提升算法对实际目标测向的有效性,本文将比较分析瑞雷波提取前后算法测向精度。与此同时,通过对比瑞雷波提取的测向精度与不同时延误差量级的测向精度,进而探寻瑞雷波提取对时延估计精度的影响效力。
为了得到适合本试验的瑞雷波能量导数门限,文献[20]对地震波信号的分析,对试验中42组爆破信号进行归一化能量特征总结分析,得出该场地的瑞雷波短时能量导数门限=0004,设置最早通过导数门限检测到瑞雷波成分的传感器单元作为参考单元,参考单元的瑞雷波起始点作为该阵列瑞雷波截取起始点,以保证各单元时间同步。截取该基站内所有传感器单元的瑞雷波完整信号,这里指波动较明显的前3个完整波形,截取瑞雷波信号如图11所示。
图11 短基线测向阵列瑞雷波信号波形Fig.11 Rayleigh signal waveform of short baseline direction finding array
为验证瑞雷波提取对算法测向精度的影响,分别对每发实弹信号直接进行时延估计,同时提取实弹瑞雷波信号进行时延估计,之后利用2组时延参数进行DFA-WV算法测向比较,表2为实弹信号在瑞雷波提取前后算法测向性能对比。
由表2可知,除4号爆破点外的其他爆破点测向检测中,提取瑞雷波后的算法测向RMSE误差较原信号测向有明显下降,均方根误差可控制在1°左右。在具有大样本数据的2号及3号爆破点处,进行瑞雷波抽取后得到测向均方根误差分别为0.899 7°和0.955 3°,相较于对实弹地震波信号直接进行时延估计得到的测向性能有大幅提高。因此,本文提出的提取瑞雷波信号进行时延估计,进而得到目标的角度估计方法可有效提升算法测向精度。
为了探寻瑞雷波抽取对提升时延精度的作用效力,首先由式(26)和式(27)可知,本文提出的DFA-WV测向算法结果仅由时延及阵列参数决定,因此瑞雷波提取对算法测向精度的影响可归结于其对时延精度的作用效力。同时,对比图10中时延误差对测向性能RMSE的影响仿真曲线,分析具有大样本数据的2号点及3号点测向RMSE值对应的时延误差量级,可知提取瑞雷波后两点测向均方根误差对应时延误差量级仅为0.3 ms,不进行瑞雷波抽取的情况下,其均方根误差对应时延误差量级分别达1 ms及0.6 ms。由此可见,瑞雷波的抽取对时延估计精度的提高有明显作用效力。
表2 实弹瑞雷波信号提取前后算法测向性能对比
4.3 不同算法测向精度比较
4.3.1 不同算法的测向仿真分析
为了验证本文提出的DFA-WV算法的有效性,将其与文献[15]中提出的Chan算法及文献[19]中提出的改进型闭式MPR定位算法进行性能对比,以论证本文所提算法的科学性与有效性,相关实验结果在给定的相同模拟环境及条件下通过数值仿真分析的形式给出。本文将从算法测向性能随距离及角度变化的影响曲线、算法复杂度方面进行分析比较。
在本仿真实验中,为了验证目标源与传感器阵列的距离变化对各算法的测向精度的影响,模拟实验环境参照本文提出的四元十字短基线传感器阵列布局,目标入射角度为相对阵列中心45°方向,不同算法在目标距离变化情况下的测向性能对比如图12所示。
在该仿真环境下,四元十字短基线传感器阵列中心点坐标取[0,0]m,各传感器坐标分别为=[-3.535 5,-3.535 5]m,=[3.535 5,-3.535 5]m,=[3.535 5,3.535 5]m,=[-3.535 5,3.535 5]m。在相对于阵列中心点45°方向,目标源在距阵列中心50~1 000 m处变化,信号到达时延误差取0.000 1 s,每处源位置迭代计算1 000次。

图12 目标距离变化对算法的测向性能影响Fig.12 Impact of target distance change on direction finding performance of algorithm
由图12表示及文献[19]所述可知,Chan算法的阈值效应导致该类算法在距目标源50 m以外的MSE性能和Bias性能出现明显下降。相对于Chan算法,改进型MPR算法在其基础之上增加了修正极坐标,提升目标角度及距离信息量测的精准度。与此同时,从图12也可以看出,在MSE性能评估方面,本文算法与MPR算法的综合性能基本一致,都可达到CRLB,目标测向Bias性能基本一致,且均优于Chan算法Bias性能,由此可见,本文提出的DFA-WV算法具有较高的可靠性。
同时,本文通过仿真形式评估3种算法在目标源相对阵列中心成不同角度下的测向性能。在本次实验中,选取目标源距阵列中心点间距为300 m,图13为入射角度不同时3种算法的测向性能对比。
在图13仿真模拟中,四元十字短基线传感器阵列参照图12仿真实验环境,目标入射角度范围为0°~180°,时延误差取0.000 1 s,每处目标源迭代1 000次。
图13 入射角度对各算法测向性能的影响Fig.13 Impact of incident angle on performance of each algorithm
由图13(a)可见,在目标源成不同入射角度对各算法MSE性能比较中,本文算法综合性能评估优于改进型MPR算法,且2种算法较Chan算法测向MSE性能有明显的改良。与此同时,在图13(b)中,对3种算法测向Bias性能对比分析,本文DFA-WV算法具有较稳定的Bias性能, 与改进型MPR算法综合性能基本一致,同样较Chan算法Bias性能有较大提高。值得注意的是,为避免目标源入射角度为90°时,本文DFA-WV算法与改进型MPR算法出现的性能下降的问题,可以利用如图8所示的短基线测向站系统示意图,通过灵活构建短基线传感器阵列与测向范围的位置关系,调整为适合实地战场的工程应用场景。
考虑到本文所提DFA-WV算法与改进型MPR算法的综合测向性能基本一致,本文也对上述3种算法的复杂度进行对比,表3为各算法计算复杂度及算法运行时间对比。
如表3可知,本文DFA-WV算法计算复杂度为(),为传感器阵列的个数。随机选取10 000个目标点进行仿真计算,本文算法所用时间仅为0.098 s,由此可知,本文提出的DFA-WV算法在测向性能评估与改进MPR算法基本一致的情况下,计算复杂度与计算时间均远低于改进MPR算法及Chan算法,故本文DFA-WV算法具有更实时及更高准确率的综合测向效能潜力。

表3 各算法计算复杂度及计算时间对比
4.3.2 不同算法在实弹试验中的测向精度分析
为了对比不同算法在实际靶场中的炮弹测向性能,对4.1节中的42发炮弹爆破激励的地震动信号进行不同算法测向分析验证。
Chan算法与改进MPR算法需预先估计信号波速值,参照式(13)通过实际数据估算出现场瑞雷波波速约327.84 m/s,通过Chan算法模型对本次42发炮弹进行定位及角度计算,得到在5个爆破点的测向偏差及均方根误差如表4所示。
表4 Chan算法测向偏差及均方根误差
表4中,测向偏差指数表示在多次爆破试验中算法测向结果与真实角度的浮动程度,均方根误差表示多次爆破试验中测向角度与真实角度的拟合程度。同样使用改进MPR算法验证在实际靶场环境下的炮弹目标被动测向精度,5处爆破点的测向偏差及均方根误差如表5所示。
本文提出的基于四元十字短基线传感器阵列的DFA-WV算法对42发炮弹进行测向结果统计,每处爆破点的测向偏差及均方根误差见表6。
对比表4~表6的数据可以看出,除4号爆破点外的其他爆破点处,基于本文提出的短基线传感器阵列DFA-WV算法测向偏差及均方根误差均明显低于Chan算法及改进的MPR算法的测向结果。

表5 改进MPR算法测向偏差及均方根误差
表6 DFA-WV算法测向偏差及均方根误差
各算法在4号点所处方向角的性能分析中,实弹试验与仿真模拟性能相符合,本文所提算法在4号点对应入射角度53.611 4°处测向性能确有所下降。对比图13(a)所示的目标入射角度对算法测向精度MSE的影响仿真实验,可知目标入射角度为50°和55°处,本文DFA-WV算法与改进型MPR算法的测向MSE性能基本一致,并且Chan算法的MSE性能也相对较好。与此同时,对比图13(b)中各算法Bias性能,在目标入射角度为50°及55°时,改进型MPR算法性能略优于本文DFA-WV算法,同时Chan算法测向偏差优于其他多数入射角情况。除仿真结果分析外,考虑到在实弹试验中4号点位置仅实施3次爆破,样本过小或导致数据可信度较低。因此,在4号实测爆破点测向中,本文所提算法测向性能较另外两种算法略有下降。
对于具有大样本的2、3号爆破点,Chan算法及改进MPR算法的测向偏差均大于5°,均方根误差均大于2.8°,说明其测向平均偏差及与真实角度拟合性较差。对比3种算法在所有实弹测向试验中的精度如表7所示。
如表7所示,对于42发实弹数据进行的算法测向精度结果分析,本文算法的测向偏差与均方根误差均小于Chan算法及改进MPR算法的结果,且测向偏差小于1°,均方根误差仅为1.089 4°,证明本文算法在野外靶场实弹目标被动测向的有效性。
为了更直观的比较各算法在实际战场中测向应用性能,对比各算法在使用相同炮弹瑞雷波时延参量下的测向角度误差,42发实弹目标测向误差如图14所示。

表7 各算法在靶场实弹试验测向性能对比

图14 不同算法对每发炮弹测向误差对比Fig.14 Comparison of direction finding errors for each shell by different algorithms
如图14所示,Chan算法测向误差出现2次较大偏差情况,改进MPR算法同样出现偏差较大的情况,且改进MPR算法对2、3号爆破点测向时多次出现阈值效应导致无测向结果输出,分别对应图14中的第20、22~24、26~29、31、32、34~36发炮弹测向结果。本文提出的DFA-WV测向算法与Chan算法及改进MPR算法测向相比,测向精度更高且具有更强的鲁棒性。
根据外场炮弹爆破的实验数据及算法分析,验证本文提出的2个创新点具有较可靠的测向性能:
1) 在与时延相关的测向算法中,对地震动信号中的瑞雷波信号成分进行提取及时延计算,可有效提高时延估计精度,以减小其对算法测向的影响。
2) 本文提出的基于四元十字短基线传感器阵列的DFA-WV算法因波速参数不影响算法结果输出,较Chan算法及改进MPR算法测向有更高的精度及算法稳定性,测向角度偏差仅为0.984°,算法均方根误差仅为1.089 4°。
5 结 论
1) 针对地震波信号非线性、非平稳的特性,基于EMD构建地震动信号分解去噪模型,并建立短时能量特性提取瑞雷波的方法,以及提出基于四元十字短基线传感器阵列的DFA-WV测向算法。
2) 实验表明本文在瑞雷波时延估计及目标被动测向中都具有较高精度,且算法具有较低的计算复杂度。
3) 使用本文瑞雷波时延估计以及基于四元十字短基线测向阵的DFA-WV算法同样可以实现高精度测向,算法具有较强的鲁棒性,适合爆破目标源的实时测向监测。
4) 本文研究有望帮助摆脱目前战场中需使用大规模广域传感器阵列探测的约束,本文所提算法的快速高精度测向为野外作战的快速部署及高精度探测提供了有力支撑,在对未知地质结构环境下的爆破目标快速高精度探测中具有一定的工程应用价值。
