北斗卫星导航系统精密定位报告算法与性能评估
2022-04-25陈俊平张益泽丁君生
陈俊平,张益泽,于 超,2,丁君生,2
1.中国科学院上海天文台,上海 200030;2.中国科学院大学,北京 100049;3.中国科学院上海天文台上海市空间导航与定位技术重点实验室,上海 200030
卫星无线电测定业务(radio determination satellite service,RDSS)是北斗独特测量体制,它使得北斗系统除了提供定位、授时、导航(PNT)服务之外,还具备位置报告、短报文通信功能,通过将位置信息进行回传,为抢险救灾、海上救援等应用的态势感知和指挥调度提供基础信息数据保障[1-2]。
位置报告是北斗RDSS的一项重要服务。在北斗系统建设历程中,RDSS定位技术也在不断发展。BDS-1采用两颗地球同步轨道卫星(GEO)的RDSS测量数据,结合数字高程,实现了双星RDSS定位,其单个坐标分量的定位精度优于25 m[3]。从BDS-2开始,北斗系统将RDSS定位与基于卫星无线电导航业务(radio navigation satellite system,RNSS)的定位技术进行有机结合[1,4-11],通过北斗卫星将用户的观测数据和时空信息进行上报,实现定位计算与位置报告功能。其中,BDS-2的RDSS位置报告服务基于5颗GEO卫星,而BDS-3则设计利用3颗GEO卫星实现重点区域的位置报告,利用14颗中圆轨道卫星(MEO)进行全球位置报告服务。
北斗位置报告针对的应用场景是无本地参考站支持、无通信手段等观测条件恶劣情况下的定位和位置报告,包含快速定位报告和精密定位报告两种类型。其中,快速定位在3颗卫星RNSS观测值的基础上增加其中1颗卫星的四程RDSS观测值,从而摆脱原来RDSS定位对高程约束的依赖,实现基于少量数据的快速定位[6-7];其响应时间小于10 s,设计的平面和高程精度优于10 m[5]。精密定位采用RNSS观测数据进行定位,其响应时间小于2 min,设计的平面和高程精度优于1 m[5]。本文介绍北斗精密定位报告服务的中心站处理算法及系统设计,并采用我国中东部50个测站的数据对精密定位报告的性能进行了评估。
1 北斗精密定位位置报告系统组成
北斗系统位置报告系统(图1)的基本原理是利用北斗RDSS链路将用户的RNSS伪距、载波相位观测数据回传至地面运控系统,充分利用中心站各种观测信息和各类精密参数,在中心站采用RDSS和RNSS观测数据实现广义RDSS定位服务[1,4-5]。它的组成包括中心处理系统和RDSS/RNSS双模用户终端两个部分。用户终端是位置报告系统的应用服务单元,它对可视范围内各卫星进行实时观测,并将观测数据通过传输链路回传到中心站,同时接收传输链路发送的定位结果。中心处理系统的主要功能是接收中心站发来的各类实时数据,对所有请求精密定位的RDSS用户进行数据处理和位置报告。
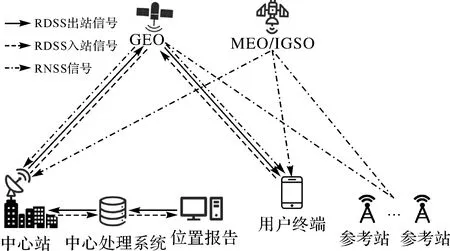
图1 北斗精密定位报告系统组成
系统工作时,北斗监测站(参考站)在本地钟控制下实时采集所有可视导航卫星的信号,从而测得各卫星的伪距、载波相位、星地时间同步、站间时间同步和气象参数等观测量,通过北斗卫通链路(或地面网链路)实时传送给中心站。中心站利用这些信息进行精密定轨、精密时间同步、电离层延迟模型、广域差分等处理,生成用户定位使用的精密轨道、钟差、电离层延迟量、广域差分改正数等信息。
用户终端在本地钟控制下实时采集所有可视北斗卫星的RNSS导航信号,测得各卫星的RNSS伪距、载波相位等观测量,同时响应来自中心站S频点RDSS询问信号,将测量得到的各卫星RNSS伪距、载波相位等信息通过RDSS入站链路传送给中心站。BDS-2的RDSS入站链路资源设计上支持单站6颗卫星3个频点,或者单站9颗卫星2个频点RNSS观测值的回传;考虑到BDS-2 5颗GEO、5颗IGSO(倾斜地球同步轨道)、4颗MEO卫星的星座设计,以上设计能力能够保证BDS-2用户回传所有可见卫星的双频RNSS观测数据。而BDS-3则扩大了入站资源,其链路资源支持单站回传所有北斗可见卫星的RNSS观测数据。
中心站RDSS业务处理系统根据RDSS入站用户类型分离出精密定位用户,将精密定位用户的RNSS观测数据和RDSS观测数据、监测站观测数据和系统精密信息实时发送给中心处理系统。中心处理系统利用用户的RDSS、RNSS观测量,结合监测站观测数据和系统精密信息完成用户的精密定位计算。在北斗系统RDSS入站用户容量范围内,对所有入站精密定位用户的数据进行并行处理。
在此基础上,中心处理系统将用户定位结果发送给中心站RDSS业务处理系统,基于RDSS出站功能将定位结果报告给用户和位置报告指挥控制部门,其出站信息格式的表达能够精确到优于1 cm的精度。在以上整个精密定位报告流程中,用户从申请定位开始至收到定位结果为止,整个过程总时延小于1 s。
2 北斗精密定位报告中心站处理算法
北斗精密定位报告的用户定位计算在中心站完成,一方面能够实现用户位置信息上报,另一方面由于中心站有各类精密产品,其定位精度也优于在用户端的处理。RDSS精密定位用户请求定位后,中心处理系统首先计算用户概略位置,并根据用户概略位置,按照一定的距离阈值(一般为500 km,可扩展至1000 km),搜索得到用户周围的监测站,综合周围监测站的数据与用户站数据进行用户定位计算。精密定位采用了3种定位方法同时处理相同的观测数据,并根据3种方法各自定位结果的精度进行择优综合,给出最终的定位结果。
2.1 区域伪距差分定位
采用区域伪距差分定位方法,中心处理系统计算离用户较近监测站的观测残差改正数,并提供给用户站定位使用,从而修正公共误差,提高定位精度。

(1)
式中,P为伪距观测值;c为光速;ρ为理论星地距,可根据已知监测站坐标和卫星精密星历计算;τi、τj、T、I分别为监测站钟差、卫星钟差、对流层延迟、电离层延迟,也都精确已知,由中心站相应信息处理系统提供。
把各选定的监测站对相同可视卫星观测残差按照一定的加权方法计算综合改正数δj,加权方法可采用加权平均、平面模型等,式(2)为加权平均模型
(2)
式中,Pi为不同监测站观测残差的权;n为监测站的个数。
在此基础上,采用精密卫星轨道、钟差及监测站计算得到的综合改正数δj,对相同时刻用户站u的伪距观测值列立观测方程,进行定位解算。其观测方程为
(3)
式中,ζ为剩余残差;其他变量含义同式(1)。卫星钟差τj由中心站提供,电离层延迟可通过无电离组合消除或者利用中心站精密电离层参数进行改正,对流层延迟通过经验模型改正或者与测站钟差参数τu及坐标参数一起解算。
2.2 基于分区综合改正数的精密单点定位
精密单点定位(PPP)是常用的一种单站定位模型,该定位模型采用非差伪距和载波相位观测值,并且输入精密的卫星轨道、卫星钟差等精密参数[12]。受监测站局域布设以及中心站数据处理实时性的影响,采用北斗中心站提供的精密轨道和钟差参数,很难满足精密定位报告2 min内优于1 m定位精度的指标要求,为此,中心站PPP定位处理还采用了北斗中心站计算的实时分区综合改正数来进一步提高定位精度[13-16]。对于双频用户终端采用无电离层组合观测模型,其观测模型为
(4)
式中,ζ、ε为伪距和载波的剩余残差;λ和N分别为载波相位的波长及其整周模糊度;IF代表无电离层组合;dPj、dLj分别为伪距和载波相位分区综合改正数;其他变量含义同式(1)。卫星钟差τj由中心站提供,对流层延迟通过经验模型改正或者与测站钟差参数τu和坐标参数一起解算。
对于单频用户终端采用半合法无电离层组合观测模型
(5)
2.3 双差相对定位
双差相对定位利用离用户距离较近的监测站测量数据与用户数据构成双差观测量,确定用户相对监测站的位置,并基于监测站的已知坐标得到用户精确坐标。测站1、2对卫星k、j的双差观测模型为

(6)
式中,∇Δ为双差符号;下标表示测站;上标代表卫星。
双差定位通过组成双差,可消除轨道、电离层及对流层等大部分误差的影响。采用双差相对定位处理时,双差组合的原始观测值可采用单频、双频无电离层组合、双频宽巷组合等[17],实现互相对比验证。如果可用的监测站超过1个,则可对不同基线的结果进行相互验证并择优。
以上3种定位模式各有特点:区域伪距差分定位只采用了伪距观测值,计算模型简单,速度快,但是其受到伪距噪声和多路径误差影响大;精密单点定位采用了非差载波相位观测值,其收敛速度受到精密参数及改正数精度的影响;而采用双差相对定位,监测站的分布及其与用户站之间距离(即误差相关性情况)将影响用户定位的收敛性和定位精度。精密定位中心处理系统针对定位速度快、定位指标高的要求,设计了完备的各类结果择优策略,最终输出综合的定位结果。
3 北斗精密定位报告精度评估
3.1 数据选择和处理策略
对北斗精密定位报告系统的定位精度进行评估,采用双频实测数据进行验证。数据观测时间为2020年12月2日—2020年12月4日,测试中选取分布于我国中东部的50个北斗连续观测站。由于北斗RDSS精密定位用户的入站资源能力能够保证其回传所有可见卫星的双频观测数据,试验中没有对这些观测站进行RDSS入站,直接通过网络实时获取这些测站的RNSS观测数据。测试测站及北斗系统监测站的分布如图2所示,在进行位置报告定位精度评估之前,其坐标均采用北斗导航接收机单天的观测数据进行后处理计算,其参考坐标精确优于2 cm。测试测站距离最近的监测站约为100 km,最远不超过500 km。在区域伪距差分定位和精密单点定位模式下,中心站会根据用户的概略位置提供相应的综合改正数;而在双差相对定位模式中,位置报告系统会根据用户概略位置选择最近的监测站的观测数据。

图2 北斗系统测站(蓝色)和测试用户站(红色)分布情况
分别采用以上区域伪距差分定位(SPP)、精密单点定位(PPP)和双差相对定位3种模式进行定位验证。考虑到普通精密定位用户RDSS入站申请频度为20 s,精密定位的数据采样率也设为20 s。按照精密定位位置报告2 min的响应需求,在数据处理中每隔2 min对定位中的所有参数进行重新初始化。将每2 min最后1个历元的定位结果作为精密定位位置报告的结果,并将其与精确已知坐标进行比较,统计其精度指标(RMS)。具体的数据处理策略见表1。数据处理中,不同卫星的随机误差定义为
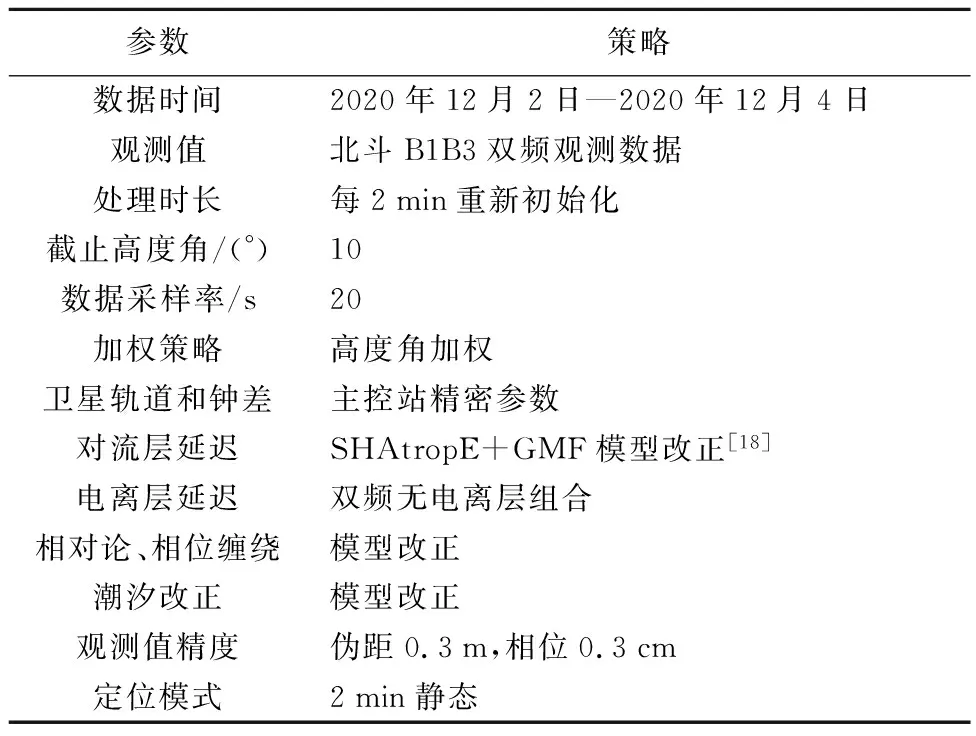
表1 数据处理策略
(7)
式中,σobs、σsisre分别为观测值的误差和空间信号的误差。北斗系统3类卫星中,GEO卫星空间信号误差较大,随机模型中对其进行了降权处理。
3.2 结果分析
3.2.1 定位误差统计分析
对每个测站3 d内每2 min的定位结果进行统计,SPP、PPP和双差3种定位模式下的平面和高程定位误差直方图如图3所示。由图3可以看出,3种模式误差分布基本相同,其中高程方向上误差差异最大,所有结果中误差小于1 m的比例分别达到了67%、67%、65%。3种模式精密定位结果的三维中误差(RMS)分别为1.29、1.07、1.14 m。
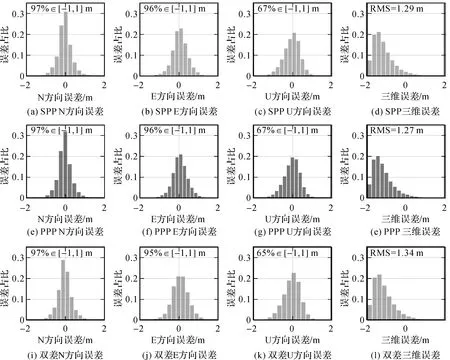
图3 3种定位模式下的用户定位误差直方图分布
3种定位模式总体定位误差统计情况见表2。3种定位模式平面坐标的RMS均优于0.6 m;在高程方向上,PPP和双差定位模式均满足1 m以内的定位精度指标,而区域伪距差分SPP在高程上则达到了1.1 m。PPP模型的定位精度最高,其平面和高程的定位精度分别为0.51 m和0.94 m,可能的原因是PPP模型中采用的分区综合改正数是由北斗系统每个分区内所有监测站综合计算得到,其误差修正总体效果较好。双差定位模型精度比PPP略差,主要原因是仅采用单基线,误差综合消除的效果可能存在不足。而区域伪距差分SPP模型由于未采用相位观测值,其定位精度较另外两种略差。此外,在采样率20 s的情况下,2 min的数据仅有6个历元的数据点,在此情况下PPP和双差定位误差还没有较好收敛,伪距观测值的噪声对定位精度仍然存在较大影响。
表2 3种模式的定位结果
3.2.2 定位误差空间分布
进一步分析各个测试站的定位精度,分析各个测站的平面和高程定位精度的空间分布情况,结果如图4所示。由图4可以看到,平面定位误差在空间上整体分布较均匀,而较多南部区域测站高程的精度则存在超过1 m的情况。平面最大误差为1.87 m,高程最大误差达到了2.12 m。
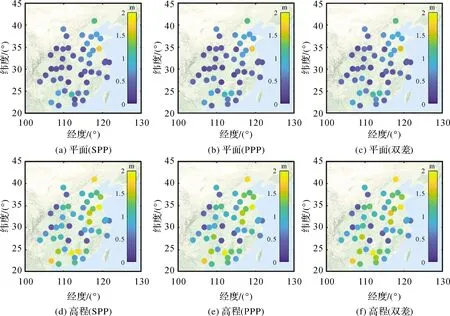
图4 3种定位模式下的用户定位误差RMS空间分布
区域差分SPP、分区综合正PPP两种定位模式都采用了多个监测站综合给出的改正数,通常距离其最近的监测站在计算综合改正数中所占的权重最大。而双差定位中选取了最近监测站,其定位精度可能与最近监测站的距离相关。图5统计了用户站定位精度与最近监测站距离的关系。由图5可知,由于数据时长短,整体定位误差噪声较大,定位精度与距离不存在明显的相关特性。

图5 3种模式下的用户定位误差与距离监测站距离关系
3.2.3 定位误差收敛情况
进一步分析精密定位误差的收敛情况,讨论观测数据时长对定位精度的影响。
对以上所有定位结果统计每个历元(每20 s)定位误差绝对值的均值,比较3种定位模式下该绝对值随观测数据累计的变化情况。同时将定位误差按照测站与最近监测站的距离分为<250、250~400 km、400~500 km 3个区间分别进行统计,如图6所示,随着数据的积累,3种模式下定位误差在平面和高程上均呈现出收敛的趋势。但受数据时长的限制,定位误差主要仍取决于伪距观测值的精度,因此3种定位模式的收敛速度均较慢。SPP定位模式中,由于估计的参数较少,各参数间相关性较PPP和双差定位模式更小一些,因此其初始定位误差更小。随着数据的累积和模糊度的逐步收敛,后两种定位模式的误差收敛更快,最终也优于SPP的结果。由图6可知,当用户站距离最近参考站越近,由于公共误差改正效果更精细,其总体收敛性能也更优。
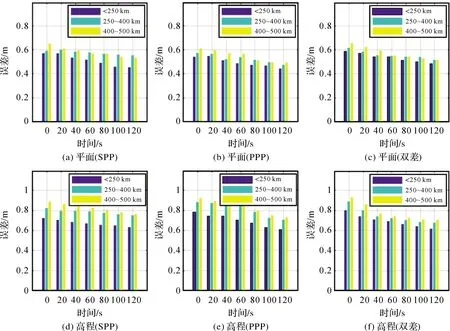
图6 不同基线长度区间的定位收敛情况
3.2.4 定位误差影响因素
3.2.4.1 BDS-2与BDS-3融合优势
BDS-3的开通增加了用户可见卫星的数量,从而有助于定位精度的改善。取其中1个测站1 d的结果进行分析,图7对比了仅BDS-2、BDS-2与BDS-3融合情况下定位情况的差异。图7中每2 min显示1个点,1 d内共720个点。图中结果显示仅采用BDS-2系统的观测数据,3种定位模式下的平面和高程精度都降低了1倍以上。由图8中该测站的可用卫星数和PDOP(position dilution of precision)的对比可以看出,BDS-3卫星的加入大大增加了用户可见卫星数,同时改善了用户定位几何构型,从而改善了用户定位精度。
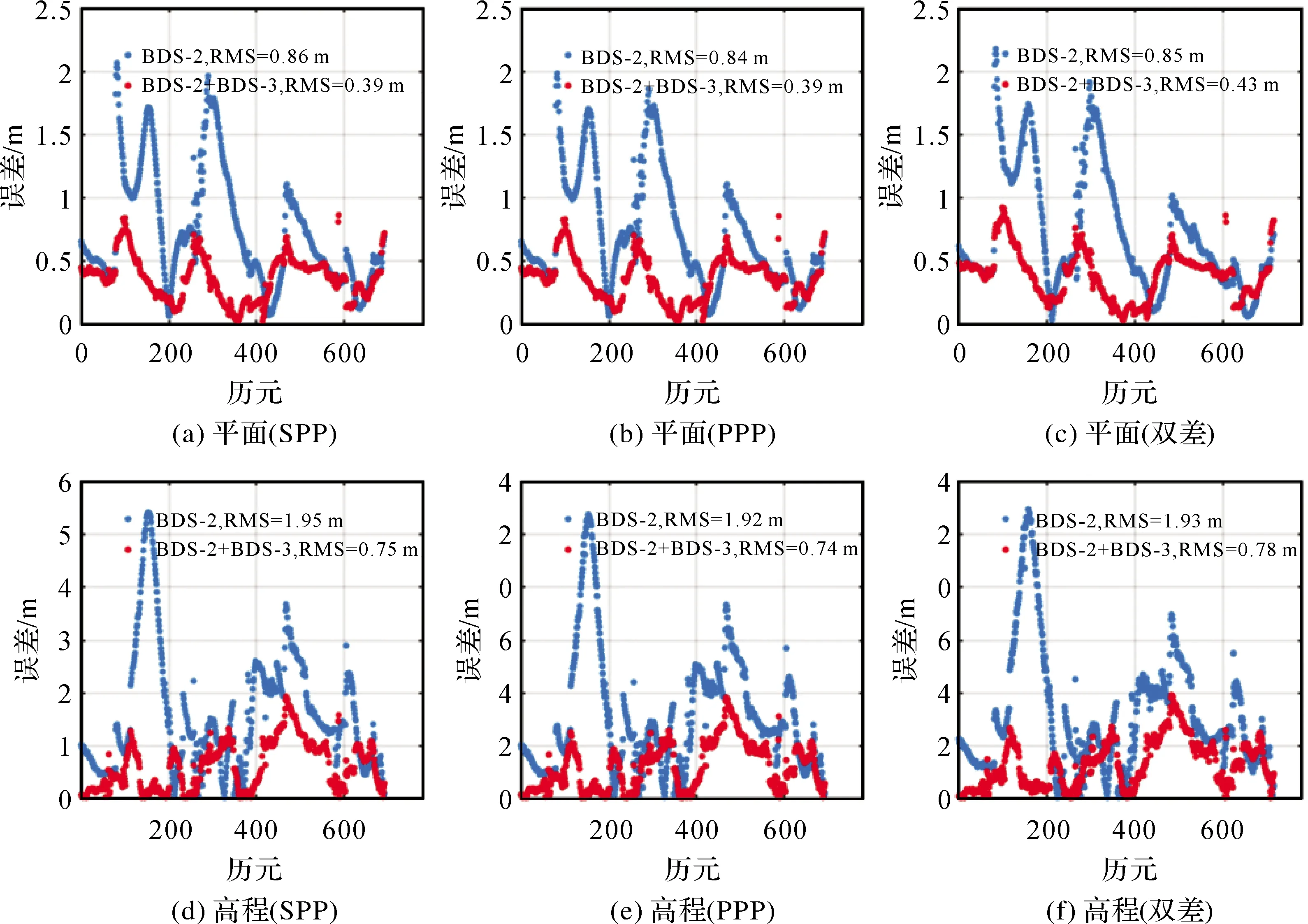
图7 仅采用BDS-2系统、BDS-2与BDS-3融合情况下精密定位比较
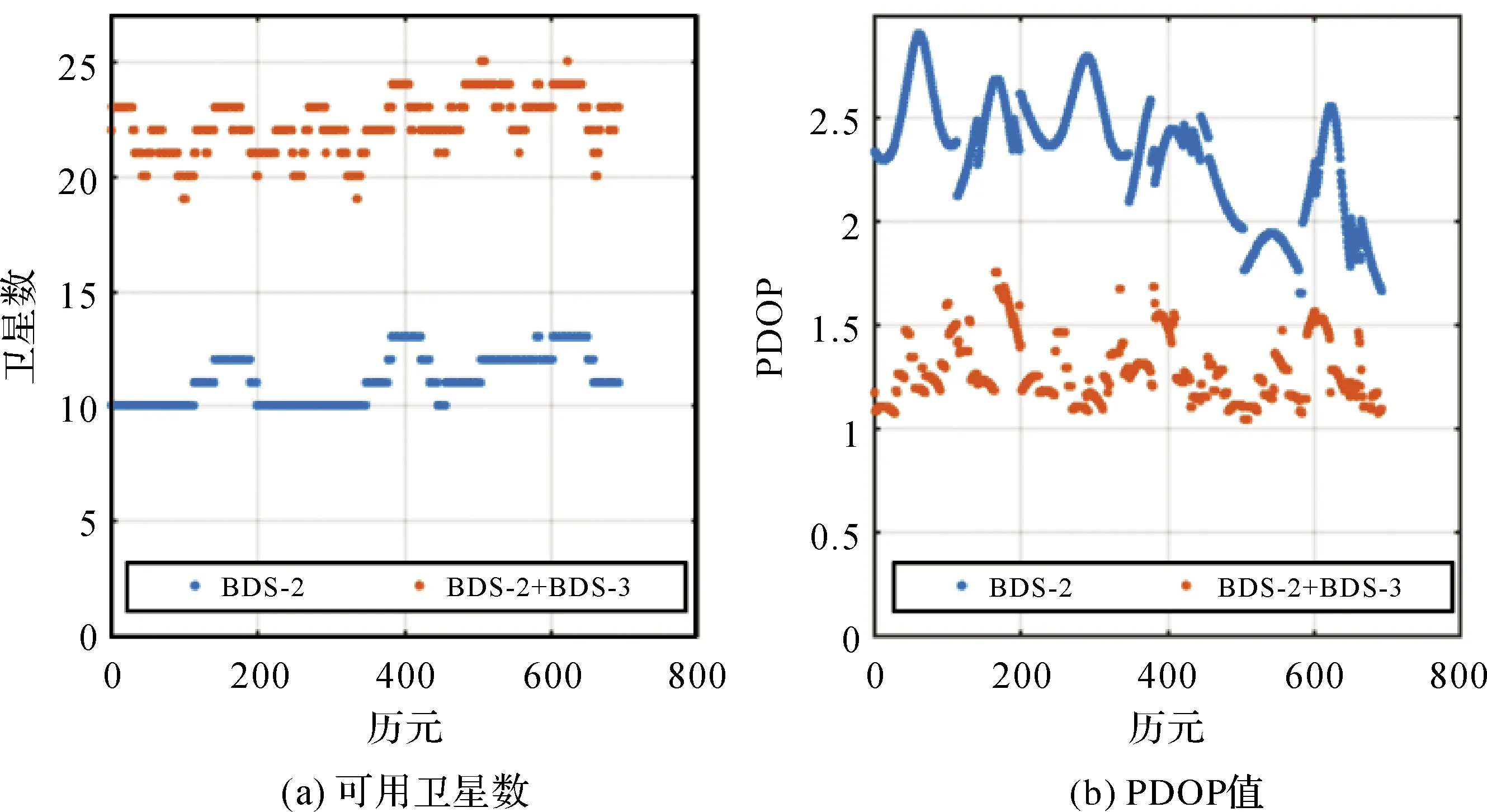
图8 BDS-2、BDS-2与BDS-3融合情况下可用卫星数及PDOP值对比
3.2.4.2 入站频度(观测数据采样率的影响)
提高RDSS用户的入站频度,能够提供更多的观测数据。如果将目前20 s的入站频度提高至5 s的频度,则可用数据量将从最多6个历元增加到24个历元。取其中1个测站1 d的结果进行分析,对比两种采样率情况下定位精度的差异。图9显示两种情况结果几乎一致,表明改变采样率对结果不产生影响。影响定位精度的在于数据的时长,在相同时长情况下,提高采样率无法提高精密定位报告的性能。

图9 不同采样率(5 s及20 s)情况下的精密定位结果比较
3.2.4.3 与采用IGS事后产品定位结果的比较
北斗精密定位报告采用的卫星轨道、钟差产品为北斗中心站计算得到,其用到的观测数据为区域监测站网+BDS-3星间链路,产品精度与IGS采用全球观测网后处理产品精度有些差距。为消除轨道、钟差误差的影响,区域差分SPP、分区综合正PPP都利用了中心站提供的实时差分改正数。为进一步验证以上误差对3种模式精密定位报告的影响,对以上数据采用IGS事后精密轨道、钟差产品按照相同的3种模型重新进行定位解算,3种模式的结果对比如图10所示。与北斗中心站处理系统的结果相比,采用IGS精密轨道和钟差产品定位的统计精度基本相同,其差异仅在毫米量级。
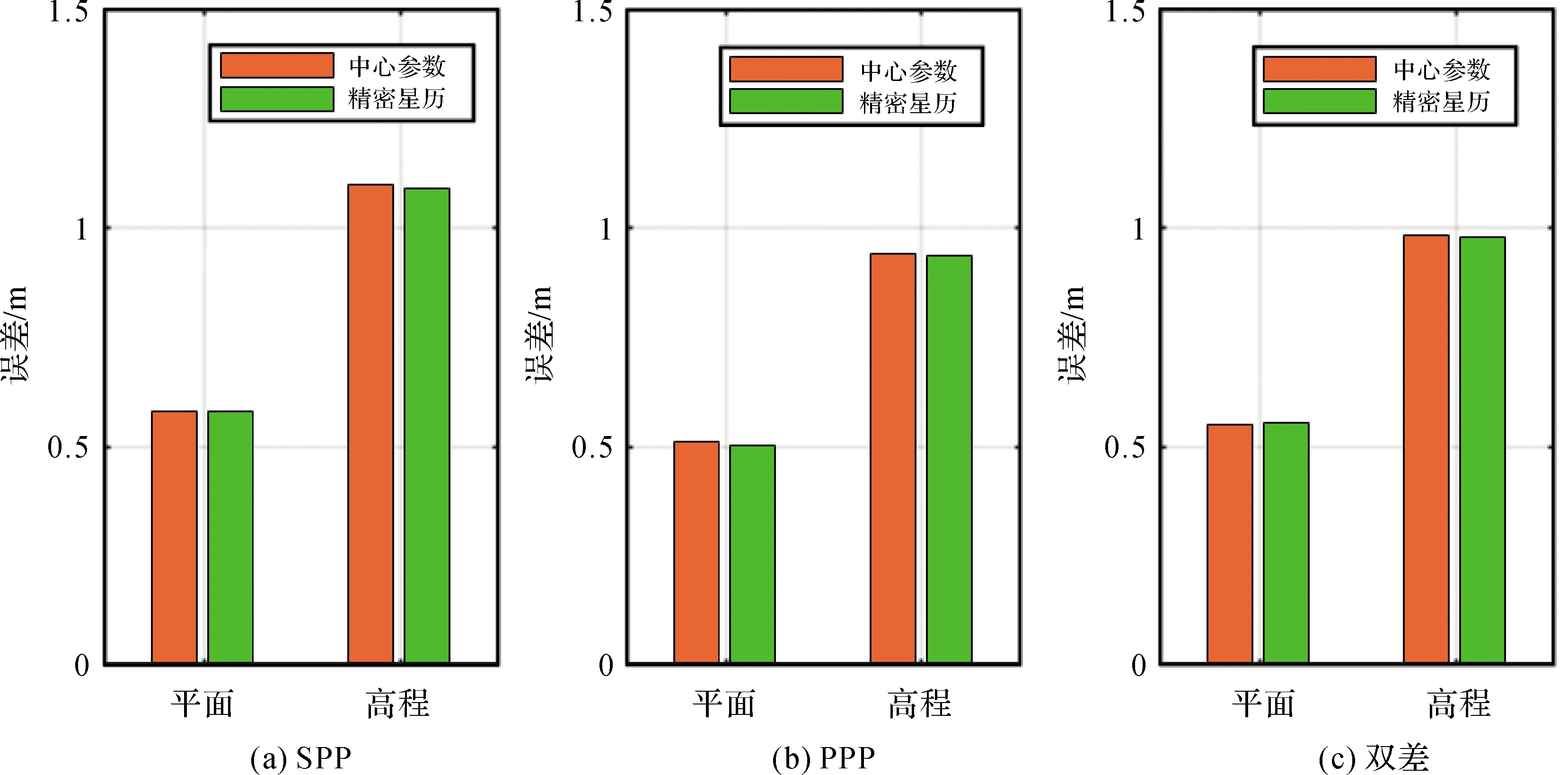
图10 采用IGS精密星历定位结果与北斗中心站精密定位报告结果的比较
4 总结及展望
精密定位报告是北斗系统的特色服务,本文介绍了系统组成、工作流程和中心站数据处理算法。基于中心站的位置报告充分利用了中心站提供的各类精密参数信息和分布于我国境内的监测站实时观测数据,能够实现对RDSS入站用户的精密定位位置报告。
利用分布于我国东部区域50个测站数据评估的结果表明:区域伪距差分定位(SPP)、精密单点定位(PPP)和双差相对定位3种模式平面精度都能满足系统优于1 m的指标要求,SPP在高程方向上达到了1.1 m,略差于指标要求。比较3种定位模型,整体定位误差分布相近,基于分区综合改正的PPP性能最优:平面和高程的定位精度(RMS)分别为0.51 m和0.94 m。在仅采用BDS-2数据的情况下,定位精度下降可达1倍以上。对入站申请频度进行分析,对比目前20 s的入站频度及提高至5 s的频度的结果,定位精度不受影响。与北斗中心站处理系统的结果相比,采用IGS精密轨道和钟差产品的定位结果仅存在毫米级的差异。
北斗精密定位报告系统除了采用回传观测数据在中心站进行处理的模式之外,还包含通过RDSS链路向用户播发改正数的方式进行用户端处理。特别是针对基于全球短报文的精密定位服务,由于单条短报文长度不得超过40个汉字(560 bit),用户很难实现观测数据的回传。因此可以将卫星轨道改正数、卫星钟差改正数、分区综合改正数、载波相位小数等实时精密修正参数通过北斗卫星进行播发,用户基于北斗通信链路接收精密修正参数,进行自主精密定位并将定位结果通过通信链路上报,从而实现全球的精密定位位置报告。
