复杂海域高精度海底地形测量关键问题研究
2022-04-25王双喜孙雪洁
王双喜,肖 强,孙雪洁
(92899 部队,浙江 宁波 315200)
苏北浅滩海域辐射状沙洲群,滩阔槽深、地形独特,属于强潮区。影响此区域的潮流系统有东海的前进波、黄海的旋转波和苏北的沿岸潮流,这些不同流系在前进的过程中达到某一谐振状态,刚好与浅滩沙脊地形配合,在潮流水道里迅速形成海水堆积,堆积速度过快,超出某一限度时,极易引起局部流速骤增、水位急涨的现象,简称“怪潮”[1]。“怪潮”极易引发严重的海难伤亡事故,对苏北沿海地区的生产安全构成了非常严重的威胁[2]。“怪潮”海域的预警和研究离不开高精度海底地形数据,但在苏北浅滩这种潮汐性质比较复杂的区域,应用常规水深测量方法无法进行有效的潮位改正,主检比对、相邻图幅拼接误差会非常明显。进行常规水深测量时,潮位处理的精度取决于验潮站的布设密度和分布情况。为了应对“怪潮”,原国家海洋局建立了多个海洋观测平台和桩基潮位站[3]。而在这种潮汐性质非常复杂的区域,这些验潮站很难满足高精度水深测量的要求。
在远距离进行高精度海底地形测量研究方面,国内外相关研究主要集中在基于全球导航卫星系统(Global Navigation Satellite System,GNSS) 动态后处理技术(Post Processed Kinematic,PPK)进行潮位观测和无验潮水深测量上。赵建虎等[4]基于PPK技术对潮位观测和垂直基准面转换方法进行了研究,在基线距离100 km 范围内,基于深度基准的全球定位系统(Global Positioning System,GPS)潮位精度优于10 cm。魏荣灏等[5]基于PPK 定位技术对杭州湾河口水下地形测量进行了实际应用,定位精度满足实际工作需要。汪连贺[6]联合GPS 和惯性测量单元(Inertial Measurement Unit,IMU) 姿态,得到瞬时水位的精确高程,验潮距离100 km 内,精度优于10 cm。但在苏北浅滩这些远离海岸区域实施测量,面临更多的挑战。短时间GNSS PPK 潮位无法实现当地多年平均海面的精确传递,故不能直接使用GNSS 验潮,需要在苏北浅滩这种无依托的软质海底设立验潮站,采用自动验潮仪和GNSSPPK 同步的方法进行深度基准面大地高的测量。此外,各种测量手段和方法获取的海底地形大地高需要转换到深度基准面上,因此还需要在苏北浅滩“怪潮”海域建立一个无缝的垂直基准转换模型,通过海洋垂直基准转换获得高精度的海底地形。
1 关键问题研究
1.1 软质海底无依托验潮站的布设
自容式压力式验潮仪以其轻便灵活、无须设置验潮井等优势在海洋测绘中得到了广泛应用。以TGR-2050 验潮仪为例,其观测精度可达1 cm 以内。自动验潮仪通过检测海水的压力变化来计算海面的波动。实测水下固定位置的压力,将绝对压力值再减去同一时刻的大气压值就可以得到该验潮点的水压值[7]。
苏北浅滩底质大部分是属于沙泥性质,相对比较松软,而且远离海岸无依托。在无依托海域设置验潮站,针对不同的海底底质和水深情况往往有着不同的验潮站布设方法。但需要慎重选择抛投地点,并采取必要的保护措施,保证验潮站的自身安全稳定和潮位数据的准确获取。
在较浅(低潮水深在3 m 以内)的软基海域一般布设桩基式验潮站。长桩杆埋入海底,在桩杆底部绑定安装自容式验潮仪。其他海域可以用抛投式方法布设海上定点验潮站。抛投式潮位站一般选择在海底平坦、海流较小的海域,尽量避开航道和渔网区。抛投式验潮站一般固定安装在基座上,为了有效保护验潮站基座安全,基座通过足够长的缆绳与铁锚连接,基座沿4 个方向展开分别设置防沉板。此外,抛投式潮位站需设置警示浮筒和网位仪,采用锚拖式方法进行回收。
1.2 GNSS 同步法确定验潮站深度基准面大地高
高精度的动态大地高测量一般采用实时动态定位技术(Real-Time Kinematic,RTK)、PPK 或精密单点定位技术(Precise Point Positioning,PPP),RTK 需要通过电台实时传递差分信息,作业距离在15 km 以内[8]。远距离时可以采用PPK 或PPP,PPK测量的基本原理与RTK 相同,只是不需要实时传递差分信息,移动站只接收GNSS 信息,事后进行差分处理,作业距离可以达到100 km 甚至更远[9]。而PPP 测量模式不受作业距离限制,但动态情况下PPP 大地高测量精度低于RTK 和PPK,特别是大地高方向的精度稍差。随着北斗卫星定位技术的成熟,远距离PPK 测量时,利用GPS、GLONASS(Global Navigation Satellite System)和北斗三模GNSS接收机,再应用精密卫星轨道和钟差,就能得到更高精度的三维坐标。
实际海底地形测量应用时以参考椭球面作为测量基准获取的数据最终应转换成深度基准面下的水深,这需要构建深度基准面和参考椭球面的垂直基准转换模型[10-12]。而对于每个验潮站来说,则需要获得其深度基准面的大地高。针对苏北浅滩海域这种远离岸边的验潮站,可以通过测量船锚定方法,在验潮站附近用GNSS PPK 技术并综合自动验潮仪数据进行深度基准面大地高测量。具体过程如下。
(1)自动验潮仪与长期站同步观测,推算出当地多年平均海面MSL 和深度基准面L。
(2)锚定情况下通过远距离GNSS PPK 获取大地高h。
(3)对测船姿态进行改正,对高程信息进行滤波。
(4)GNSS PPK 测量的瞬时水位HW与自动验潮仪潮位进行比对,计算得到该验潮站的深度基准面大地高。
测量船锚定情况下通过姿态传感器和GNSS 数据进行PPK 解算,获得该验潮站的瞬时水面信息。GNSS 同步法如图1 所示,通过PPK 解算能够准确测定GNSS 天线的大地高,天线到水面的天线高可以在码头靠泊时通过全站仪测量得到。因此瞬时水面的大地高计算公式如下。
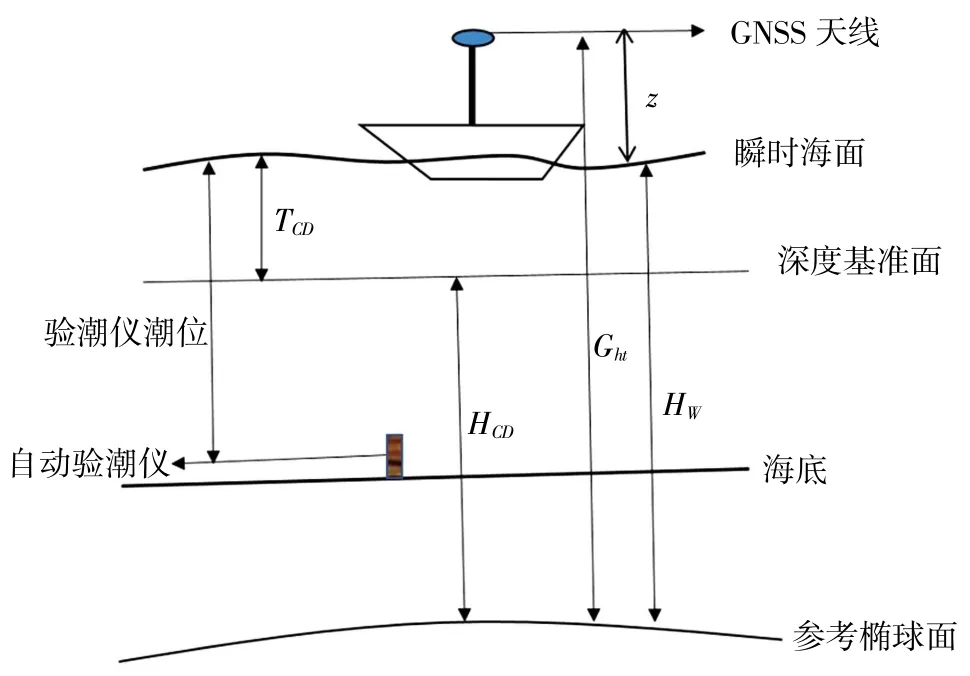
图1 GNSS 同步法确定深度基准面大地高

式中,HW为瞬时海面的大地高;Ght为GNSS 天线大地高;z 为GNSS 天线到海水面的高差。
与自动验潮仪潮位数据进行对比,可以获取深度基准面的大地高,计算公式如下。

式中,HCD为验潮站深度基准面大地高;TCD为自动验潮仪以深度基准面为基准的潮位。经滤波得到的GNSS 潮位信息能够正确反映海上定点验潮站的潮位信息,从而验潮站就能获得基于参考椭球面和深度基准面的两种基面的潮位观测值。直接比较潮位序列即可确定基面的关系,即深度基准面大地高。

式中,n 表示潮汐序列的总个数;TGNSS表示GNSS 潮位。
为了保证精度,GNSS 同步法需要连续观测4 h以上,观测时间至少要有一个低平潮或者高平潮过程,最好进行完整潮汐周期对比。自动验潮仪布设期间应该进行两次GNSS 同步观测,然后将计算得到的深度基准面大地高进行对比,消除各种系统误差影响。
1.3 复杂海域无缝垂直基准模型的构建
以苏北浅滩为例,浅滩面积大,局部地形水深相对较浅,低潮时大面积干出。如果只采用水深测量方法则效率较低,只能抢在高潮时进行测量,还容易造成船只搁浅产生事故,人员安全无法保证。在大面积干出滩进行测量时,可以采用气垫船和机载LIDAR(Light Detection And Ranging)测量手段,并辅以人工测量进行验证。在重点航道,地形复杂的深水区域可以采用多波束无验潮水深测量,其他区域可以高潮时段进行单波束无验潮水深测量。这些测量手段和方法的共同点是实际获得的测量数据为海底地形的大地高,因此需要构建连续无缝的垂直基准模型[13],以保证每个测量点的大地高能够转换到深度基准面上,而且还可以进行无缝连接。
如图2 所示,测量数据的参考基面为参考椭球面,根据平均海面与地球重力场模型EGM2008 大地水准面模型相近似的特征,可以采用移去恢复法,根据EGM2008 模型,通过验潮站深度基准面大地高构建出复杂海域无缝垂直基准模型,具体步骤如下。
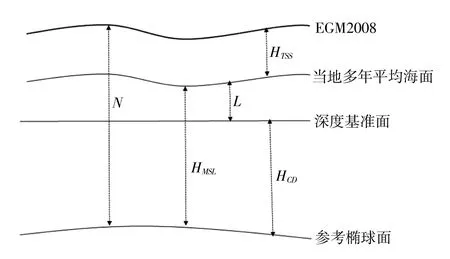
图2 垂直基准关系
(1)先确定复杂海域包括验潮站在内的所有测量范围。
(2)在测量区域建立深度基准面规则格网,格网大小根据实际的潮汐性质来确定,通过各验潮站的深度基准面L 值在网格点进行插值。
(3)测区范围内建立一个大地水准面差距N 的格网文件。
(4) 建立海面地形的插值模型,通过GNSS PPK 测量和当地多年平均海面计算,求出当地多年平均海面的大地高HMSL,并与大地水准面差距N 进行比较,得到海面地形HTSS如下。

(5)建立整个测区的深度基准面大地高模型,深度基准面大地高HCD的计算公式如下。

2 实例分析
2.1 技术方案
实验区域选择苏北浅滩海域,本区域包含各种海底地形,包括“怪潮”容易产生海域、大面积干出滩、港口和航道等。为了得到高精度的海底地形,本文通过以上关键问题技术研究,制定了一套针对“怪潮”海域的海底地形测量作业的技术方案。为了构建大范围测量海域的垂直基准转换模型,共布设6 个抛投式无依托海上验潮站,测区已有6 个长期验潮站。验潮站都采用TGR-2050 自容式验潮仪,并与长期验潮站同步观测1 个月。验潮仪布设24 h 后采用锚定法进行第一次GNSS 同步观测,验潮仪回收前再进行第二次GNSS 同步观测,观测时长4 h 以上,其中包含低平潮或高平潮,长期站也进行两次GNSS 同步观测。自动验潮仪回收后,所有数据都稳定有效,没有出现明显的沉降和位移。
2.2 精度分析
GNSS 接收机采用双频多模接收机,GNSS PPK测量采用双基站模式,最远基线长度为94 km。为了验证远距离GNSS PPK 解算的精度,设计了两种验证方案:一是用两个基准站(相距62 km)中的一台当流动站进行处理;二是利用三台接收机,流动站与基站相距92 km 左右,与另一个已知控制点相距5 km 以内。控制点的坐标先通过静态相对测量进行解算获得毫米级的三维定位精度,以此控制点作为基准站进行短距离动态解算,解算结果认为是真值,再评估远距离GNSS PPK 解算结果的精度。观测数据采用Waypoint 软件进行处理,远距离时下载IGS(International GNSS Service) 精密星历参与解算。两种方案计算出的大地高对比情况如图3 和图4 所示。
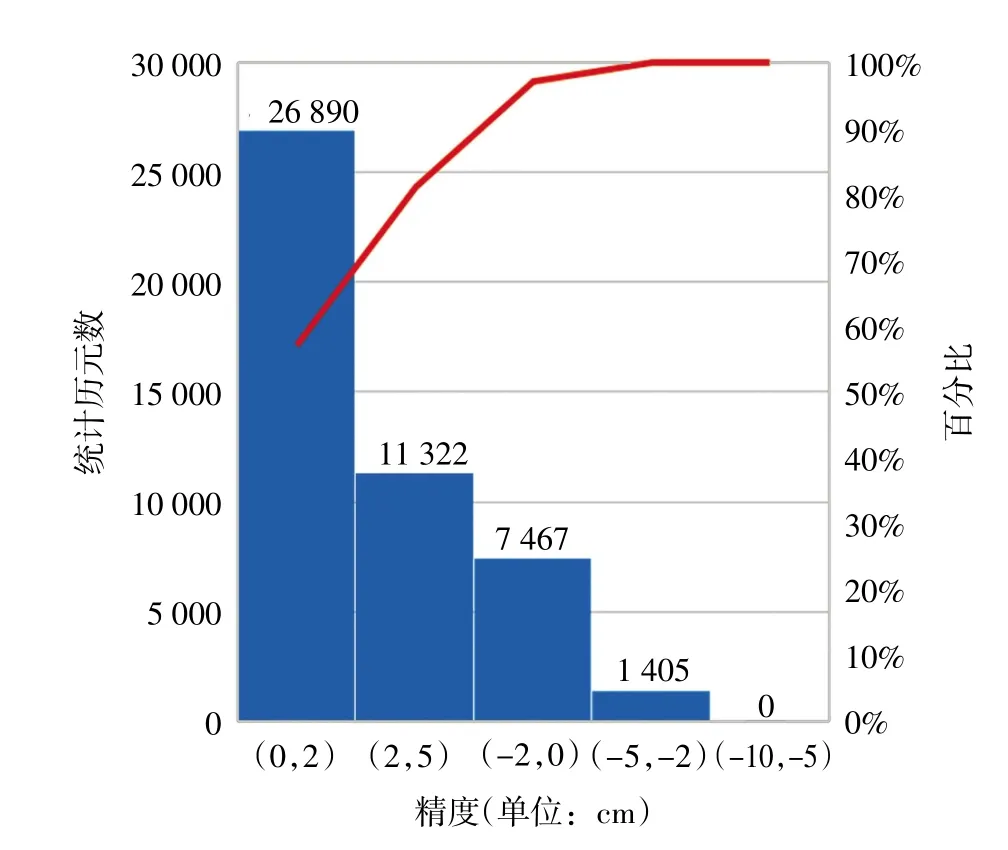
图3 远距离静态测量时动态处理结果对比
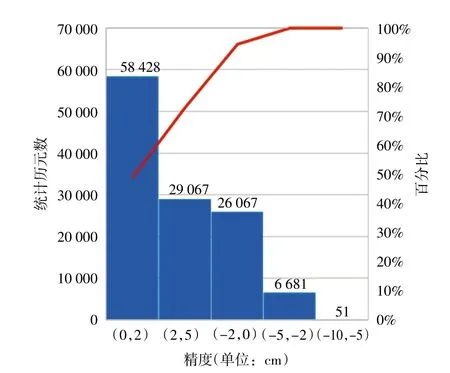
图4 远距离动态测量结果对比
以初始坐标为参考,评估静态情况下的动态处理的精度,统计结果显示大地高差值Δh 的误差区间为[-0.08 m,0.12 m],集中分布在5 cm 以内,中误差为±0.032 m;以近距离解算结果为真值,评估动态模式的精度,统计结果显示大地高差值Δh 的误差区间为[-0.13 m,0.14 m],集中分布在10 cm 以内,中误差为±0.045 m。两种情况的大地高精度都在10 cm 以内,80%以上在5 cm 以内。静态测量时精度要明显高于动态测量,这是由于静态测量时的PPK 解算中的滤波算法精度更高,此外远距离动态测量时只能与近距离测量结果进行对比,近距离PPK 测量本身也会存在一定的误差。
采用同步法进行验潮站深度基准面大地高推算时,GNSS PPK 采用的两个基准站分别位于测区南北,两站相距62 km。解算时为提高精度采用双基站模式,以其中1 个基站3 次24 h 精密单点定位解算的平均值作为初始坐标,另外一个基准站用静态相对测量进行解算。12 个验潮站分别进行了两次GNSS 同步观测,经综合计算后的GNSS PPK 潮位与基于深度基准面潮位进行对比,结果如表1 所示。
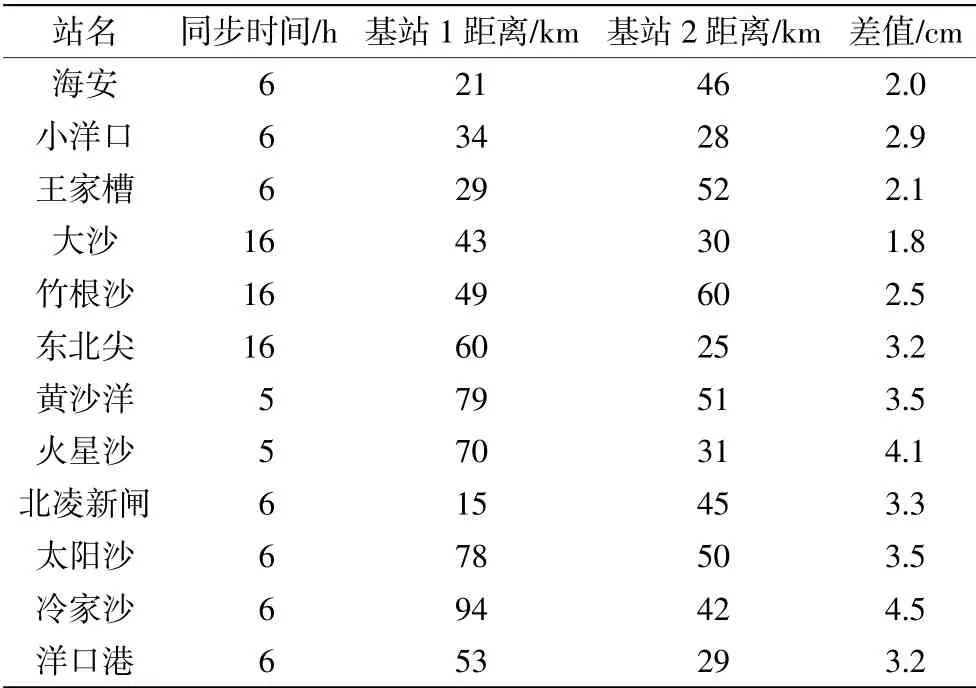
表1 GNSS 同步法两次结果对比
从表1 可以看出,两次GNSS 同步测量的结果相差在5 cm 以内,具有很好的一致性。同步时间较长的验潮站,深度基准面大地高的精度也相对较高。此外,验潮站站间距离对垂直基准关系的计算也有一定的影响,验潮站与基准站相距较远时,深度基准面大地高的精度相对较低。但站间距离在100 km 范围内,内符合精度仍优于5 cm。
为了验证外符合精度,在小洋口长期验潮站架设了GNSS 天线进行静态测量,通过长期站已知的各基面关系,直接推算出长期站的深度基准面大地高,经计算两者仅相差1.8 cm。结果表明,直接计算的精度与GNSS 同步法基本一致,满足相应规范精度要求。
为了验证构建的垂直基准模型精度,小洋口等10 个验潮站参与垂直基准模型计算,模型格网设置为2 km。利用黄沙洋和火星沙两个验潮站作为检查站。经模型插值计算得到的两个检查站的深度基准面大地高与实际测量值进行对比,两站分别相差3.9 cm 和2.1 cm。结果表明,无缝垂直基准模型的精度在5 cm 以内,考虑到远距离GNSS 的测量精度,其综合精度优于10 cm。
为了验证最终海底地形测量成果的精度,选取测区1∶25 000 的水深成果图,分别采用常规水位改正方法和本文方法进行水位改正处理,水深成果主检测线交叉点不符值共检测1 758 个点,对比如表2 所示。
从表2 可以看出,采用常规水位方法时,水深测量精度不符合规范要求,这是由于潮汐性质的差异较大,而验潮站布设密度不足所引起。而以参考椭球为测量和数据处理的基准,应用本文方法进行水深改正时得到的最终水深成果具有较高的精度,能够满足在复杂海域实施海底地形测量的精度规范要求。
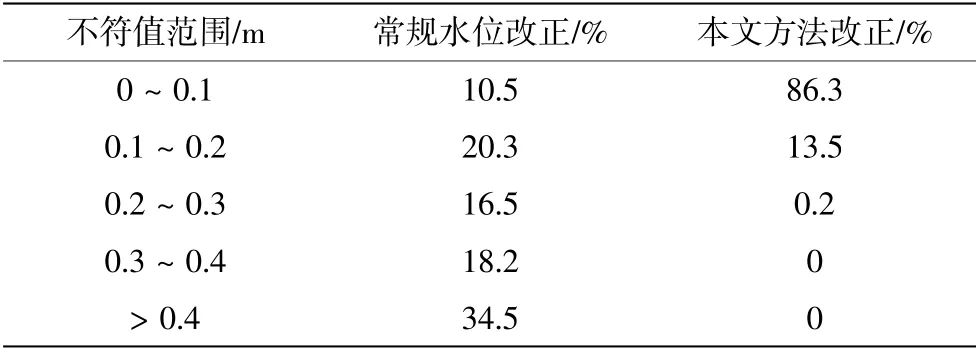
表2 水深成果主检测线交叉点不符值对比分析
3 结 论
本文通过苏北浅滩测量实践进行研究,重点解决了复杂海域潮位改正和垂直基准转换中存在的问题,结合实际应用得到的主要结论如下。
(1)在软基海底布设无依托海上验潮站时,浅水海域采用桩基式,较深海域采用抛投式能够获得较为稳定的潮位数据。
(2)GNSS PPK 基线距离在92 km 时,大地高的解算精度优于10 cm,能够满足测量规范精度要求。
(3) 通过对12 个验潮站GNSS 同步法计算出的深度基准面大地高进行对比分析,基线距离小于100 km 时,两次GNSS 同步测量的结果互差在5 cm以内,两者精度具有一致性。
(4)通过构建垂直基准模型可以对整个测区水深数据进行无缝转换,无缝垂直基准模型的精度优于5 cm,考虑到远距离的GNSS 测量精度,综合精度优于10 cm。
本文针对苏北“怪潮”海域这种特殊海底地形测量进行研究分析,技术方案与精度评估结论对其他潮汐复杂海域的海底地形测量也有一定的参考价值。
