高速无刷直流电机在实践教学中的应用*
2022-04-25陈少华马利娇贾欣雨
陈少华,马利娇,贾欣雨
(北京信息科技大学仪器科学与光电工程学院,北京 100192)
随着信息化技术的快速发展,各学校在自动化、测控技术等专业学生的培养方面做了大量的创新改革,例如增加实践课程,将实物设计纳入学生成绩等。提高学生动手能力,增强实践技术是工科类专业教学改革的一个重要目的。传统的教学实验平台已经无法很好满足学生自主创新实践的要求,因此,建设综合性创新实验平台,开设具有自主设计、高参与性、组织协助性较强的实验系统变得非常必要。
无刷直流电机作为一种体积小、密度大、转速高的电机,被广泛应用于无人机、电动汽车、家用电器等领域[1-2],是工科学生就业领域较为常见的仪器装置。相对于传统低速无刷直流电机,高速无刷直流电机具有更高的功率密度[3]。提高电机转子位置检测精度是优化电机性能的一种重要手段[4]。传统的检测转子位置的方法是安装位置传感器,例如旋转变压器、霍尔传感器等,但是安装位置传感器会增加电机成本,增大电机体积,降低系统效率。本实验平台采用无位置传感器控制算法检测电机转子位置,实验平台的软件和硬件均采用模块化设计,减少了重新设计系统的工作量。实验平台选用德州仪器公司的TMS320F28335作为控制芯片,具有精度高、功耗低、性能佳等优势,是电机控制系统常用的控制芯片。该控制芯片提高了算法设计发挥空间,完全可以满足高精度、大运算量的算法实现。利用算法检测转子位置信息,将位置信息作为反馈,控制功率开关管的开通与关断,使电机能够稳定快速启动,精准换相,并且可以减小电机体积,降低成本,应用于教学实验中激发了学生的学习热情,加深了学生对无刷直流电机控制方法的理解与应用,教学效果良好[5-6]。
1 实验平台硬件
本文所设计的实验平台主要包括高速无刷直流电机、电源电路、控制电路、功率逆变电路、无位置检测电路等部分。可实现对无刷直流电机无位置传感器的启动控制、正反转控制、换相误差补偿控制等。实验平台系统结构如图1 所示。为降低高压电路的操作风险,将直流电源电压限制在48 V,电流限制在5 A,功率驱动电路的输出信号线采用双绞屏蔽线,提高了系统的可靠性。
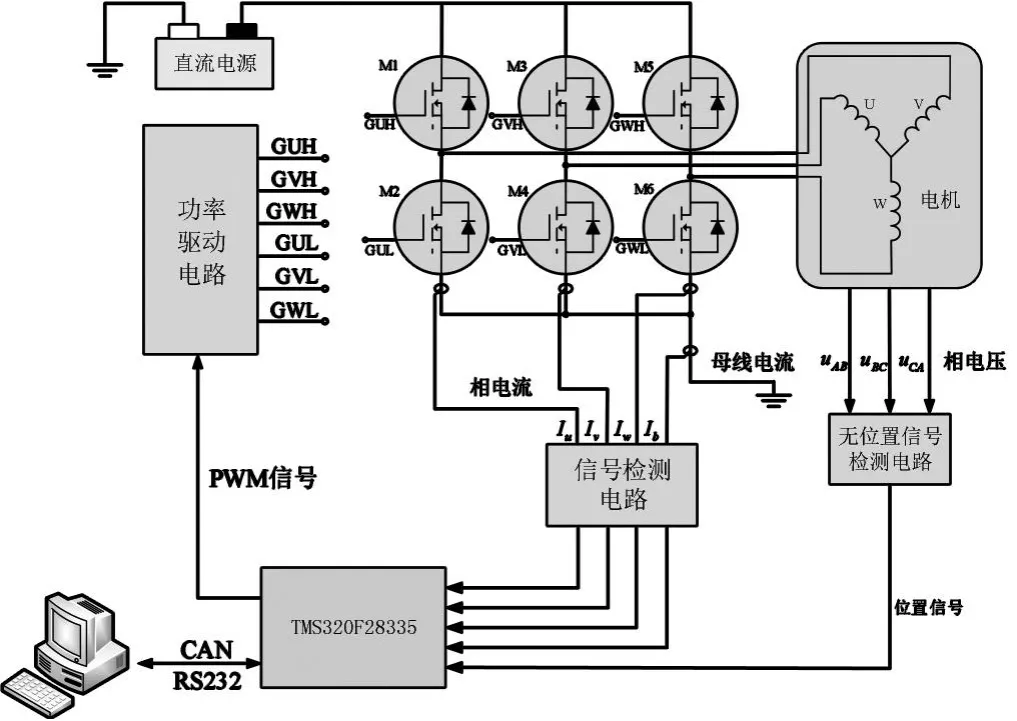
图1 实验平台系统结构图
1.1 电源电路
实验平台的供电由控制部分供电和功率部分供电组成,控制电主要为控制电路中DSP28335 芯片、数据采集芯片、各级比较放大器、速度控制等部分供电。控制板中采用TPS767D301 实现低电平转换,可实现1.5~5.5 V 的电压输出。功率电部分提供功率电路的较大电流驱动,由熔断器、电阻、电解电容、肖特基二极管、场效应管、电容、EMⅠ滤波器、电源转换模块等部分组成。总之,实验平台电压转换电路将24 V 直流电分别转化为+12 V、+15 V 和+5 V,从而分别为控制板、母板、驱动板上的芯片和器件供电。
1.2 控制电路
控制电路部分,由控制芯片DSP28335、晶振、复位电路、信号采集电路等组成。TⅠ公司生产的TMS320C28335 芯片具有150 MHz 的高速处理能力,可实现32 位浮点运算,自身带有18 路PWM 输出和12 位16 通道ADC,具有精度高、成本低、功耗小、性能高、外设集成度高、数据以及程序存储量大、A/D转换更精确快速等优点,特别适用于高速电机控制系统。
1.3 功率逆变电路
功率逆变器的主体由6 个功率开关管及其驱动电路组成,通过PWM 信号输入控制功率开关管按照一定的逻辑进行开通和关断。由控制器根据控制逻辑输出6 路PWM 高频驱动信号,经施密特触发器74HC14锐化驱动信号后,再经触发器优化调节后输出6 路信号,这6 路信号经增强驱动电路提高驱动能力后,分别进入6 个TLP250 隔离光耦器件,光耦器件可以起到光电隔离和增强电路驱动能力的作用,最后光耦输出用以驱动逆变桥功率模块的开通和关断,实现电机旋转。当电机需要反方向旋转时,可通过调用不同的换相表实现反方向旋转控制。另外,当系统出现过流、欠压等状态时,可通过刹车电阻让电机快速制动。
1.4 无位置检测电路
无位置检测电路由低通滤波电路、功率放大电路和隔离电路组成,电机反电动势信号可直接从电机三相端获得,电机输入的三相位置信号先经过一阶低通滤波电路进行滤波。一阶低通滤波电路的引入将导致位置检测信号出现延时,为了在程序中进行相位误差补充,将离线采集的位置误差与转速的关系记录在数据表格中,当采用不同的低通滤波电路时,直接调用不同的补偿角度数据表,灵活快速地换相误差补偿。采用LM393 功率放大器放大功率进入HCPL2630 隔离光耦后,输出包含电机转子位置信息的HALLA、HALLB、HALLC 信号。根据转子位置信号设置电机PWM 驱动信号。将电机转子1 个电周期分为6 个工作作态,每个工作状态为60°,当检测到换相信号上升沿时,需根据不同的低通滤波器设计值选择不同的补偿角度,实现高精度实时换相误差补偿。
2 实验流程设计
利用上述模块化电路搭建高速无刷直流电机无位置传感器控制实验平台,实验平台由一台高速200 W无刷直流电机、控制电路板、功率逆变电路板、无位置检测电路板、开关电源、仿真器、PC 机及示波器组成。该实验平台搭建完成之后,可以完成不同截止频率下的电机启动实验和不同转速下电机换相误差及补偿实验。实验流程如图2 所示。
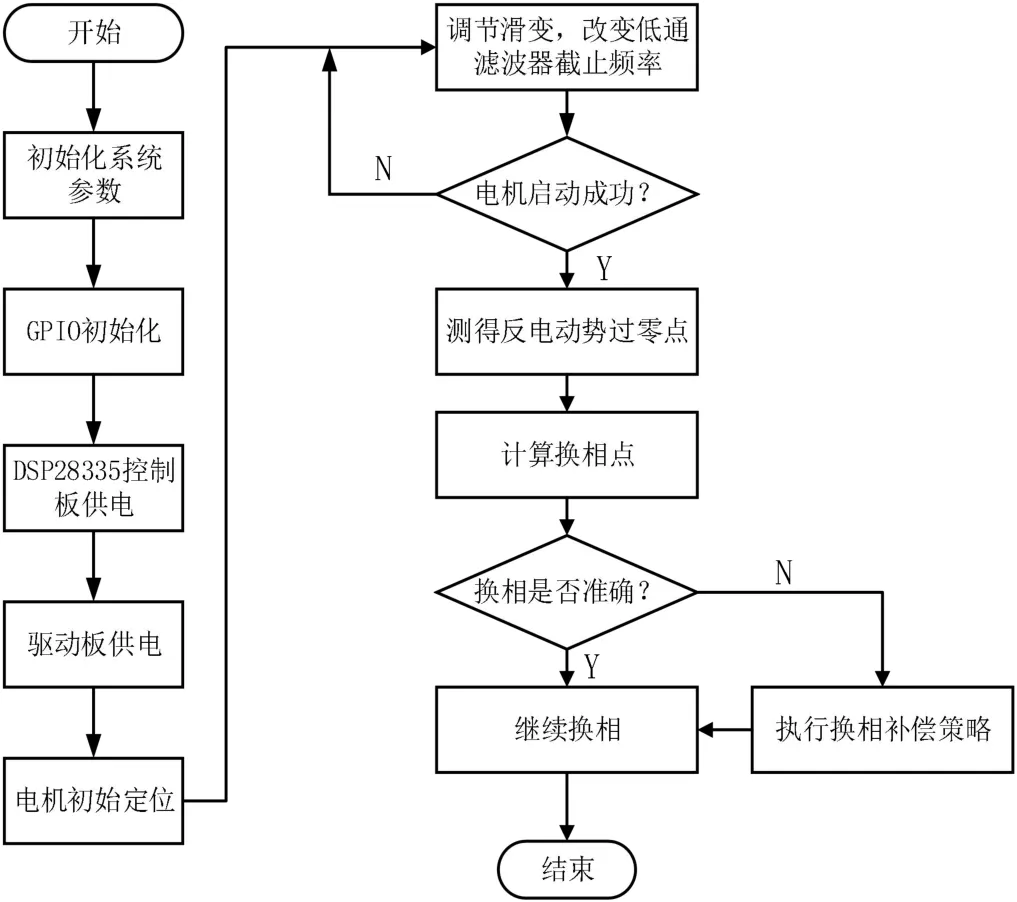
图2 实验流程图
3 实验及结果分析
无位置检测电路主要由低通滤波器、功率放大电路和隔离电路组成,低通滤波器的主要作用是通低频,阻高频,选择合适的低通滤波器既可以滤除高频干扰又可以防止相位延迟太大导致启动失败,因此低通滤波器截止频率的选取对于电机换相的准确性影响很大。本实验平台可以通过选取不同的电容电阻改变截止频率,观察不同截止频率对延迟角度的影响,从而选取合适的截止频率的低通滤波器。不同电路参数配置不同滤波器,让学生们动手选取可以加深学生们对低通滤波器对于电机启动的影响的理解。截止频率为47.74 Hz 时,电机在无位置传感器模式下的启动波形如图3 所示。由图3 可知,在无位置传感器启动阶段,由于换相误差导致启动电流较大,当启动过程结束后,电机换相准确,相电流较小。此实验环节,学生可先仿真不同截止频率下滞后角度与截止频率的关系,再进行实验验证,很好地锻炼了学生的仿真与实验能力。
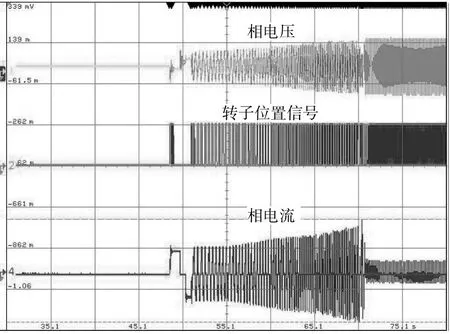
图3 无位置传感器模式下启动波形
由于无位置电路板低通滤波器的引入,将导致电机转子位置检测出现相位滞后,因此需要进行电机相位补偿。根据观察换相前后电机相电流波形的变化可以判断出电机换相超前或滞后,进行相应的补偿。实验结果如图4~图6 所示。
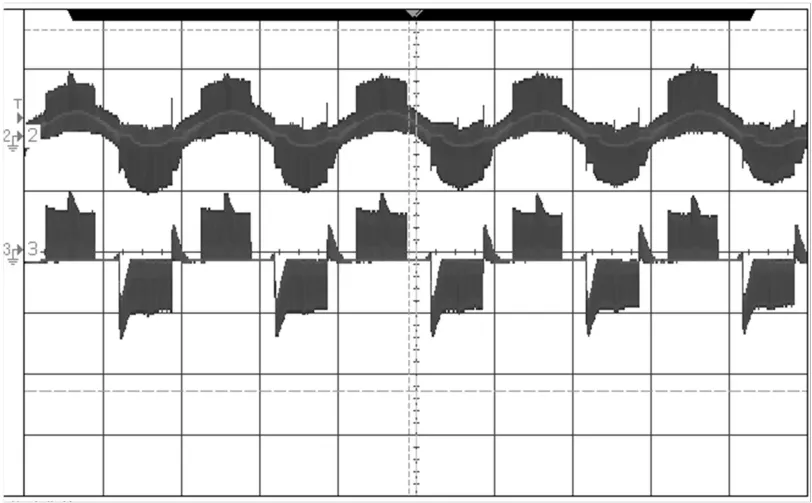
图4 换相超前时相电压与相电流波形
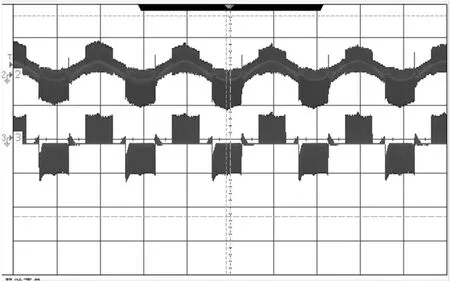
图6 换相准确时相电压与相电流波形
由图4 中的波形可以看出,当换相超前时,相电压和相电流波形出现畸变,影响电机效率。由图5 中的波形可以看出,当换相超前时,相电压和相电流波形同样会出现畸变,电流波形畸变位置与超前时相反;当换相滞后时,同样降低了电机运行效率,严重时甚至导致电机换相失步。由图6 中波形的可以看出,换相准确时,电压和电流波形在正负半轴对称,电机运行效率较高。
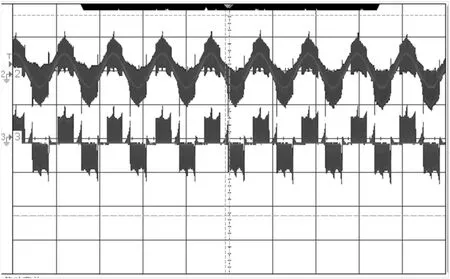
图5 换相滞后时相电压与相电流波形
4 结语
针对自动化、测控技术专业的电机控制课程,分析了高速无刷直流电机控制实验系统的结构组成和工作原理。分析了不同截止频率对转子位置检测的影响,通过实验验证了电机无位置启动时换相误差补偿控制。整套系统设计结构清晰、成本较低。在教学实验中,可利用本套实验系统开展课程实践设计、创新思维训练、创新创业项目等多层次项目,达到应用型专业教学实践目的。
