基于格子玻尔兹曼方法的圆柱阵列积灰数值模拟*
2022-04-24王斌武宋小鹏
王斌武 宋小鹏
(桂林航天工业学院 能源与建筑环境学院,广西 桂林 541004)
颗粒物(如灰尘等)在固体表面上的沉积特性研究对工业生产有重要意义,大量科研工作者研究了各类工业过程颗粒沉积过程。闫顺林等[1]对烟气横掠麻面管束内的颗粒沉积特性进行了数值模拟,以减轻积灰影响;陈自勇等[2]研究了工业燃煤锅炉烟气中的飞灰颗粒在烟气侧换热表面的积灰机制及影响因素,为提高换热器抗积灰提供了思路;文夏楠等[3]采用数值分析的方法研究了含尘烟气在波纹板换热面上流动和积灰特性,为烟气余热利用提供参考。朱辉等[4-5]研究了典型捕集面,如圆、椭圆、方形等截面柱体及球体上气溶胶耦合捕集特性,为提高纤维的灰尘捕集率提供参考;汤松臻,王飞龙等[6-7]研究了一些换热器表面的积灰及抗积灰特性,部分计算结果与实验一致。
常规计算流体力学软件在处理颗粒堆积或者复杂几何计算域时存在不足,为了解决这些问题,很多科研工作者使用LBM程序计算复杂流场。GUAN Y[8]使用LBM方法计算了非球体绕流流场及其阻力系数并与实验结果吻合较好;李育昆[9]基于用Gidaspow模型,使用LBM-EDM(离散元法)耦合模型研究了喷动床内的二维气固两相流。Boccardo G等[10]给予LBM计算了多孔介质内颗粒的运动轨迹、沉积,基于颗粒的沉积对流场的影响未予考虑;宋小鹏[11]基于LBM方法模拟了圆柱表面的积灰过程,其中考虑了颗粒堆积后对流场的影响;童自翔使用LBM方法模拟了颗粒在横掠管束的顺排和叉排的沉积过程和特性[12],另外利用LBM-FVM-CA耦合方法模拟了管表面上的颗粒沉积与脱离过程[13],计算得到的积灰形态与实验结果一致。
诸如布袋除尘器或口罩等以吸附灰尘为主要功能的装置,灰尘粒子在纤维表面进行堆积,当纤维与堆积灰尘的尺度同数量级时,灰尘的堆积会影响流场,进而又影响积灰过程,此时积灰过程与流场是双向耦合的,常规计算流体力学软件难以模拟该过程。灰尘的堆积可能造成流动通道局部阻塞,局部阻力增加,一方面影响除尘效果,另一方面影响会造成与除尘工艺配套的风机功耗增加。本文尝试使用LBM程序包计算圆柱形纤维的非稳态绕流流场,基于该流场计算颗粒物在纤维表面的沉积,并探讨颗粒物灰尘在纤维表面的沉积过程和形貌。
1 数学物理模型
1.1 物理模型
为了简化计算圆柱阵列表面的积灰过程,假设灰尘颗粒为球形且直径均为10 μm,横截面为正方形的计算域如图1所示,横截面边长为100倍灰尘直径,即1 mm,左侧为流体(空气)入口,右侧为出口。通道内有圆柱形障碍物(如纤维),其半径假设为6倍灰尘直径,即60 μm,圆柱阵列中心圆柱位于距入口0.8 mm,颗粒由入口附近矩形截面(80 μm×40 μm)随机位置注入。

图1 圆柱阵列及计算域示意图
1.2 数学模型
1.2.1 LBM方法
LBM方法中,流体被抽象为大量流体粒子,粒子间动量和能量的交换是通过移动(streaming)和碰撞(collision)完成的,这个过程可以使用玻尔兹曼传输方程来描述[10]:
(1)


图2 D3Q19模型
(2)
根据粒子移动速度和分布函数,可计算得到粒子的实际运动速度:
(3)
而粒子的非平衡态分布函数可以由下式得到:
(4)
(5)
粒子在19个方向移动的概率wi(i=0~18)各不相同:
(6)
1.2.2 颗粒运动
忽略重力,仅考虑了颗粒的曳力,计算域内颗粒的运动方程为:
(7)

1.2.3 定解条件与相关设定
为了研究不同圆柱阵列布局对颗粒堆积的影响,计算了图3中所示的4种阵列。其中图3(a)中的阵列,直接相邻的圆柱,中心距离均为20 μm,称之为“顺排”阵列;图3(b)中的阵列在(a)的基础上,后排的圆柱中心距离逐渐减小10 μm,首排圆柱中心距离间距40 μm,称之为“前宽后窄”型阵列;图3(c) 中的阵列布局与(b)相反,称之为“前窄后宽”型阵列;图3(d) 中的阵列在(a)的基础上去掉了中心的圆柱体,称之为“中空”型阵列。

图3 圆柱状障碍物阵列示意图
计算域内流体为空气,入口流速为0.01 m/s,故圆柱绕流的雷诺数小于0.01,计算域内流动为层流。出口设置为自由出流,计算域其他四面设定为free-slip边界条件,圆柱表面设置为no-slip边界条件。
为了使得粒子在圆柱表面堆积后能够对流场有影响,假设灰尘粒径与格子间距完全相同,将堆积在障碍物表面上的灰尘颗粒所在相同位置的格子设定为“反弹”边界条件,该处格子速度变为0 m/s。颗粒由计算域入口处的设定面注入,颗粒在该面上根据设定概率随机生成。假设灰尘颗粒到达圆柱障碍物表面即认定被永久吸附到障碍物,另外,当灰尘颗粒被障碍物吸附后,该灰尘颗粒物也被认定具有吸附功能,将对与其碰撞的灰尘颗粒进行捕捉吸附。本文先计算流场,待流场达到稳态后,开始注入灰尘颗粒,并记录颗粒被捕捉的时间和位置以便后期统计。
2 结果与讨论
2.1 圆柱阵列表面的积灰过程
前述数理模型下,计算了入口速度为0.01 m/s
时,颗粒在图3(a)中的圆柱阵列所在计算域内不同时刻时的运动过程,如图4所示:图4(a)显示了颗粒在注入面上随机生成并开始在曳力作用下随流体运动;由于圆柱阵列的遮挡,阵列前方空气流速相对较小,图4(b)中的颗粒在阵列前方运动速度也较小,这也暗示了颗粒达到阵列两翼的时间可能会更短;图4(c)中的颗粒开始达到圆柱阵列,并呈现明显的绕流特性;图4(d)显示了颗粒不断达到圆柱体表面并堆积。
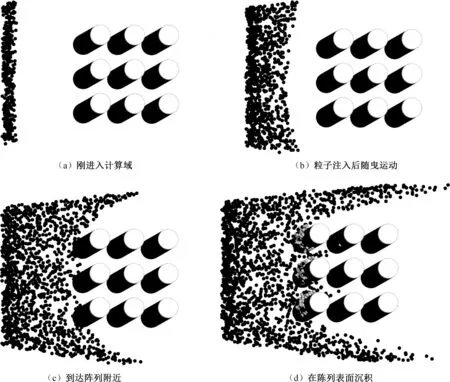
图4 颗粒在计算域内的运动
图5显示了球状颗粒在圆柱阵列表面的堆积过程:首先颗粒达到前排阵列表面并被吸附图5(a);随着颗粒物不断注入,越来越多颗粒在圆柱表面(主要是早期)和已被吸附颗粒附近(后期)堆积,颗粒被第二排和第三排圆柱捕集,如图5(b/c);最终越来越多颗粒物在圆柱表面堆积,并呈簇状生长,生长方向与来流速度呈反方向,如图5(d),整体上,大部分颗粒被捕集到第一排圆柱,最后一排捕集颗粒最少。
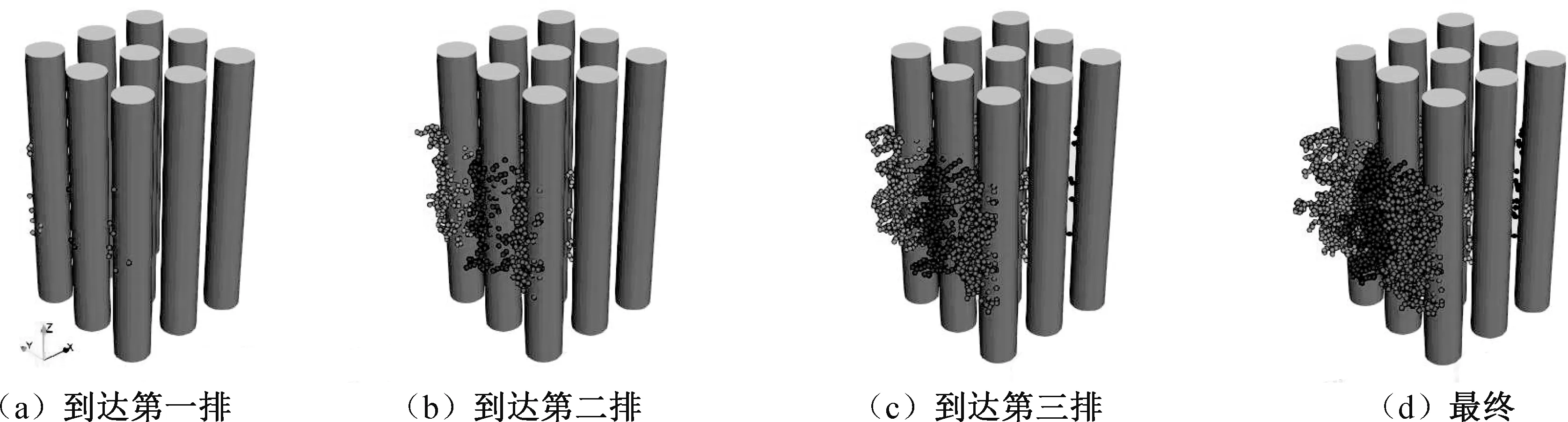
图5 颗粒物在圆柱阵列表面堆积过程
使用前述数学模型及条件,计算了图3中的a、b、c和d不同圆柱阵列下,约1 000个颗粒物堆积后的形态,如图6所示:颗粒物堆积形貌在本文条件下呈枝簇结构,且枝簇结构朝与来流相反的方向生长。与“顺排”阵列相比,“前宽后窄”型阵列的前排圆柱颗粒物堆积相对较少,后排颗粒堆积数量相对较多,这是由于该阵列流体相对易于通过;“前窄后宽”型阵列由于前排圆柱间隙较小,故颗粒物主要堆积到前排圆柱,可能造成局部堵塞,透气性变差;“中空型”阵列与“顺排”型阵列颗粒堆积形貌相近,区分度不大。
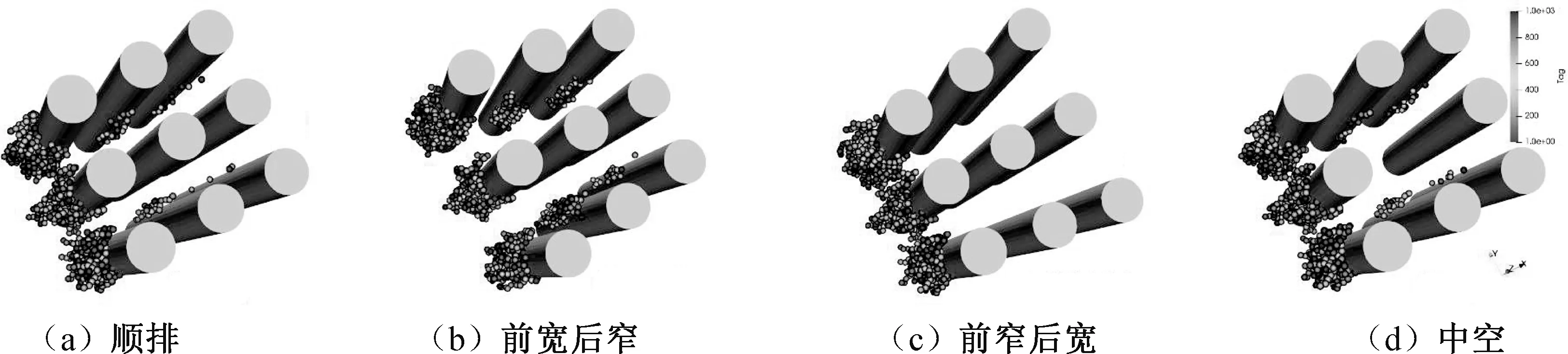
图6 颗粒物在圆柱阵列表面堆积形态
2.2 圆柱阵列表面内积灰对流场的影响
如果颗粒物粒径与圆柱直径在数值上相差不悬殊,则颗粒物被圆柱所捕集后,势必会影响气流。图7(a)和(b)分别绘制了圆柱阵列在颗粒堆积前后的空气速度幅度分布,选取法向为Z轴的计算域中心横截面。显然由于颗粒在圆柱表面上的堆积,妨碍了流体流动,阵列前方的流体速度有所减小。另外由于颗粒堆积后,圆柱之间流体有效通过的通道被颗粒所占据,导致阵列之间的流体速度整体有所减小。

图7 积灰前后计算域内的流动云图
为了定量描述颗粒堆积对流场的影响,选取计算域内法向为Z轴的中心横截面,绘制圆柱阵列在颗粒堆积前和后的空气速度矢量,如图8(a)和(b)。与图7相同,被颗粒吸附并堆积到圆柱表面处的流体速度近乎0,流体除了由绕圆柱流动,变为绕圆柱和颗粒堆积物流动。同样由于颗粒堆积物的存在,一定程度上阻碍了流体穿过阵列,阵列内的流体速度降低。
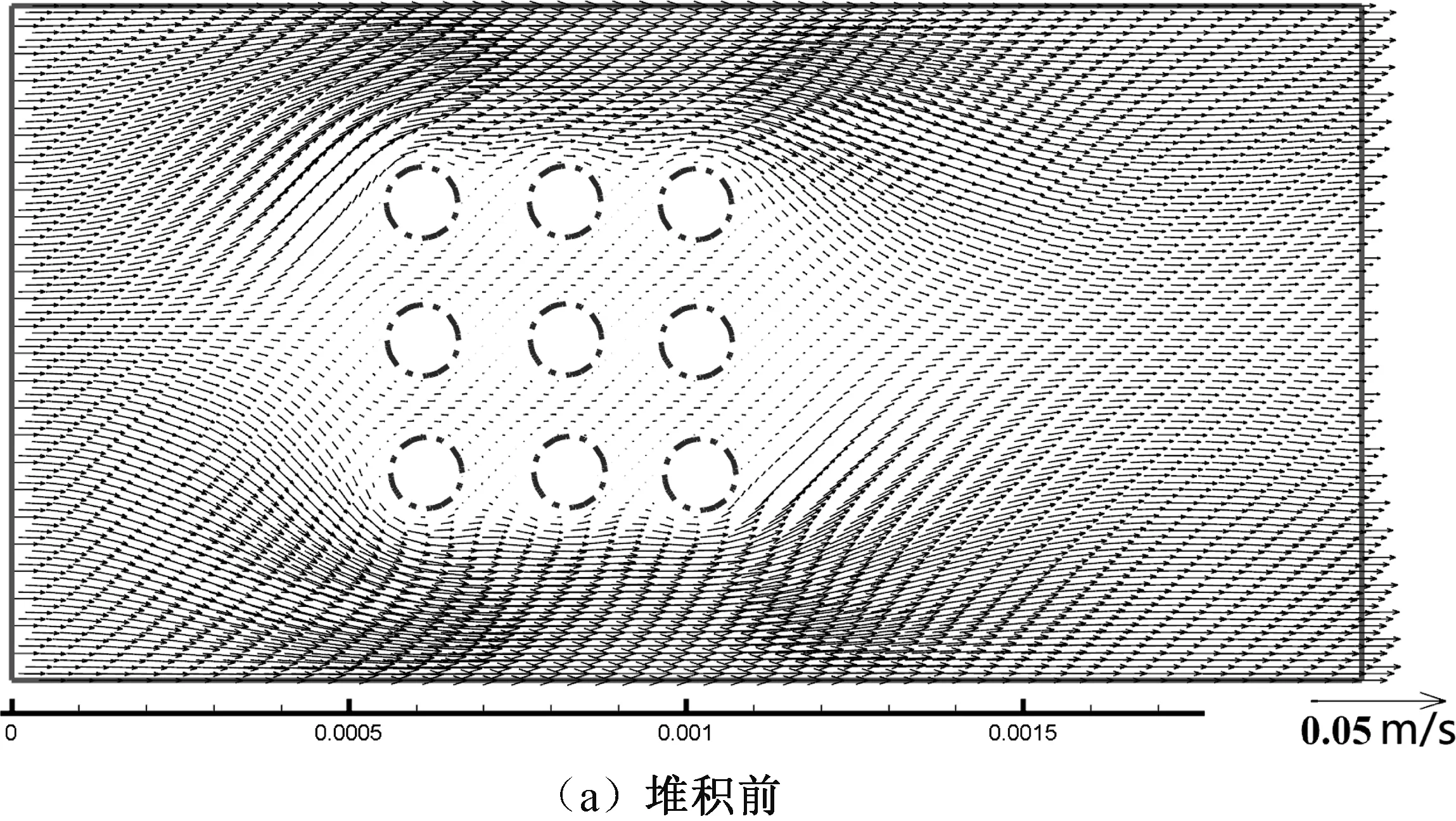
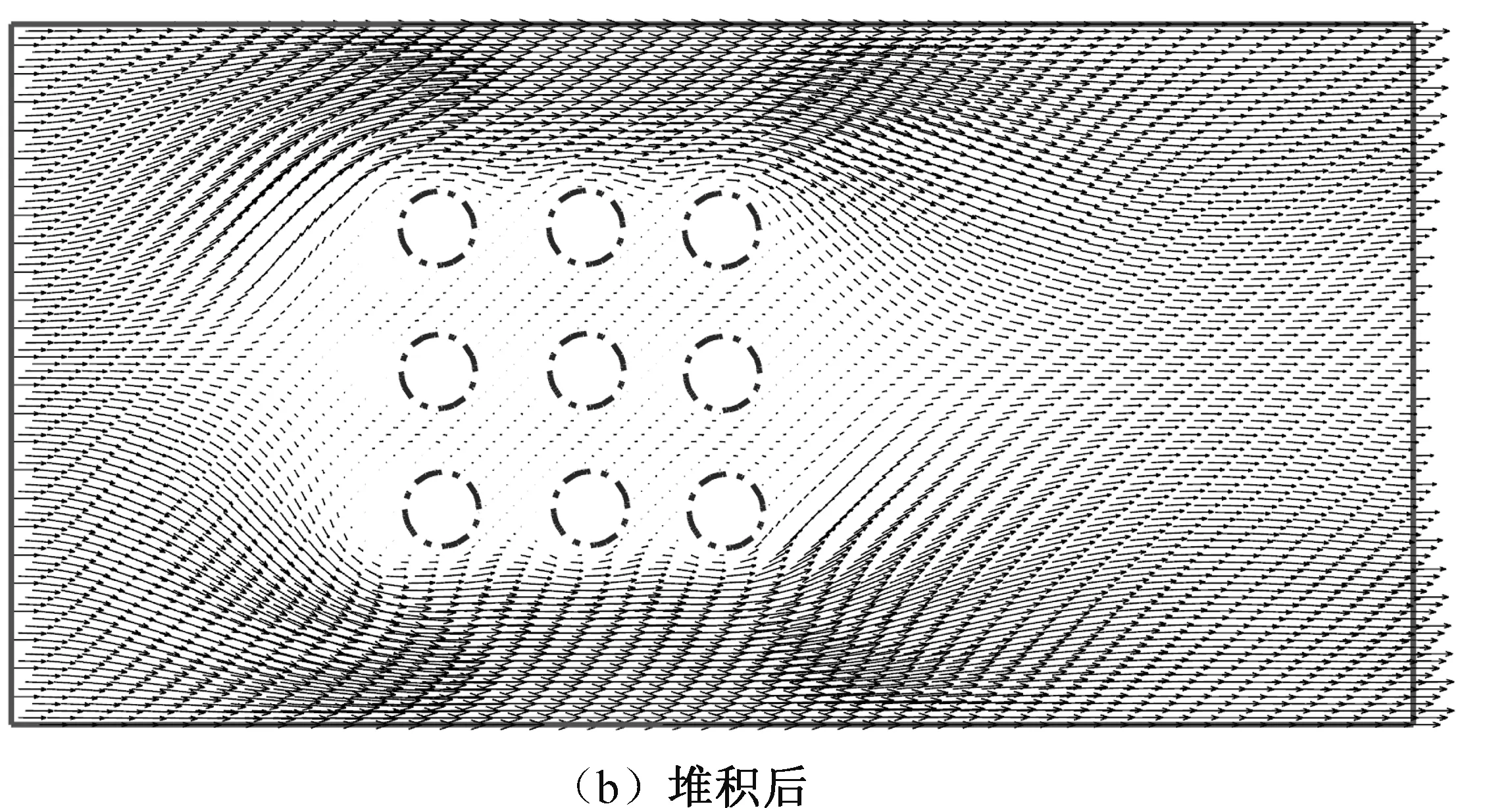
图8 积灰前后中心横截面上的速度矢量图
选取计算域内法向为Y轴的中心纵剖面,绘制圆柱阵列在颗粒堆积后的空气速度矢量,如图9(a),相对应的颗粒物堆积后形貌俯视图如图9(b)。图9(a)可见颗粒物堆积后其附近流动速度接近0,圆柱后侧的流体速度也接近于0;图9(b)中相邻圆柱表面的颗粒物堆积生长并接近,势必造成局部“堵塞”,故本文计算条件下的颗粒堆积物对流场的影响不可忽略。基于此,后排编号4、6、7和9号圆柱捕集颗粒主要集中于圆柱内侧,这些颗粒穿过1、2和3号圆柱间隙后终被后排圆柱所捕集;编号4、6、7和9号圆柱外侧几乎没有捕集颗粒,可能源于颗粒经过前排圆柱后如图4(d)所示绕过了阵列,不能被圆柱所捕集。

图9 积灰后纵截面上的速度矢量分布及颗粒堆积形貌
2.3 圆柱阵列对颗粒物的捕集特性
为了探讨图3中所示的4种阵列a、b、c和d排列对颗粒捕集效率,记录各个时刻阵列捕集颗粒的数量,图10显示了在各个阵列上沉积了1 000个(约)颗粒的过程,粒子从被注入计算域到开始被捕集耗时约0.16 s,随着粒子的堆积,捕集比例近似线性增加。图中可见捕集相同数量的颗粒,“前宽后窄”型阵列,耗时最少,而且捕集效率相对较高,其他三类阵列捕集效率接近。
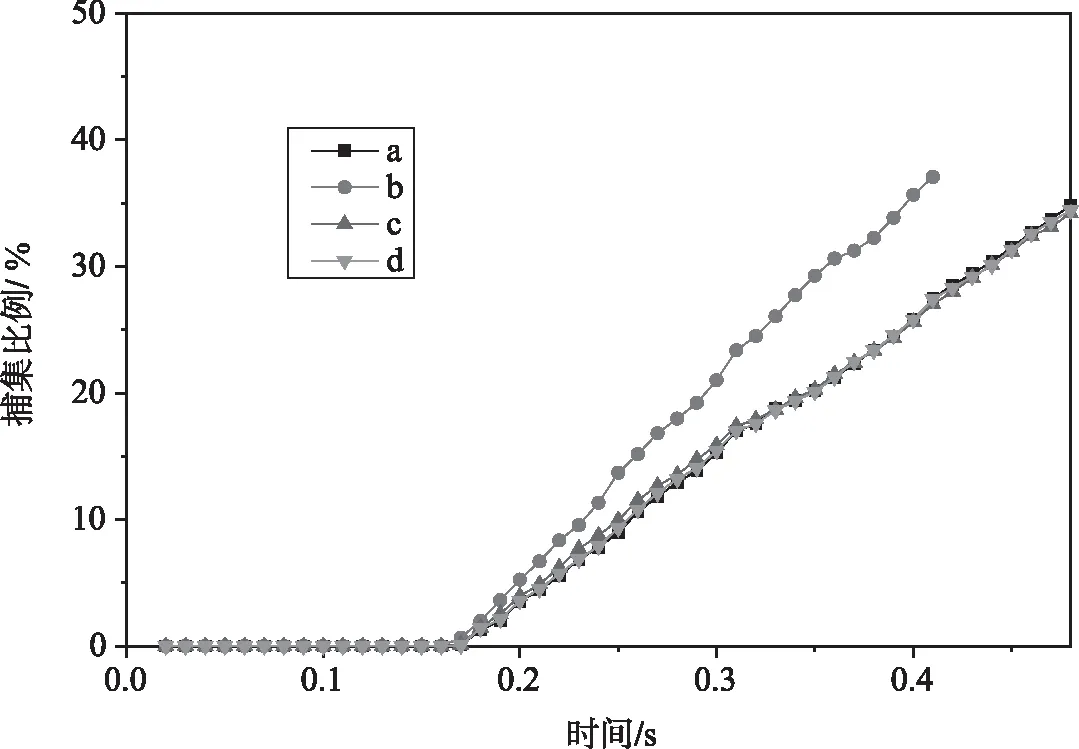
图10 不同阵列布置下对颗粒捕集比例
为研究图3中所示的4种阵列a、b、c和d的排列时各个圆柱表面对颗粒的捕集情况, 图11给出各阵列捕集约1 000个颗粒后,编号1~9的各阵列圆柱表面捕集颗粒的数量分布。图中可见与“顺排”阵列相比,“前宽后窄”型圆柱阵列,流体更容易穿透,故其前排编号1/2/3的圆柱捕集颗粒相对有所减少,但第二排编号为4/6的圆柱表面颗粒捕集数量有所增加,甚至第三排也有少量颗粒被捕集;与“顺排”阵列相比,“前窄后宽”型圆柱阵列,不利于流体通过,故颗粒捕集主要集中在第一排编号1/2/3的圆柱上,如果堆积颗粒较多,可能会影响流体流通,甚至造成局部堵塞。a、b和c三类阵列中心的5和8号圆柱几乎没有颗粒被捕集,可能因为被前面圆柱所遮挡;阵列d“中空”,与“顺排”阵列相比,区分布不大。
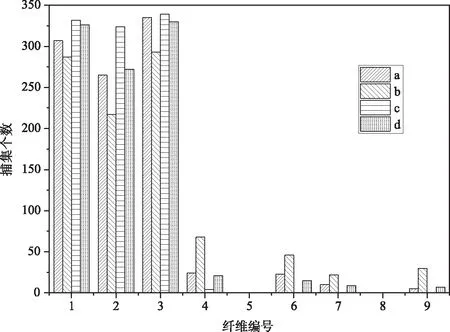
图11 不同阵列布置时各圆柱表面对颗粒的捕集量
为了研究颗粒在圆柱表面的沉积情况,各个圆柱阵列捕集1 000个颗粒时,统计了不同圆柱阵列表面上的颗粒沉积时刻和对应的圆柱编号,如图12所示。可见“顺排”阵列颗粒主要被圆柱1~3捕集,并持续最长时间,被圆柱4~6捕集较晚,被7~9捕集最晚且数量最少,同时居于中间的圆柱2开始捕集颗粒的时刻略晚于圆柱1和3,这可能由于图8中所示的阵列前流体速度较小而导致。“前宽后窄”型阵列效率高,且后排圆柱捕集颗粒数量相对有所增加,捕集相近数量的颗粒耗时最少。“前窄后宽”型圆柱阵列由于前排圆柱间隙小,绝大多数颗粒被圆柱1~3所捕集。与“顺排”型阵列相比,“中空”型虽然少了一个圆柱,但对颗粒的捕集特点几乎一样。
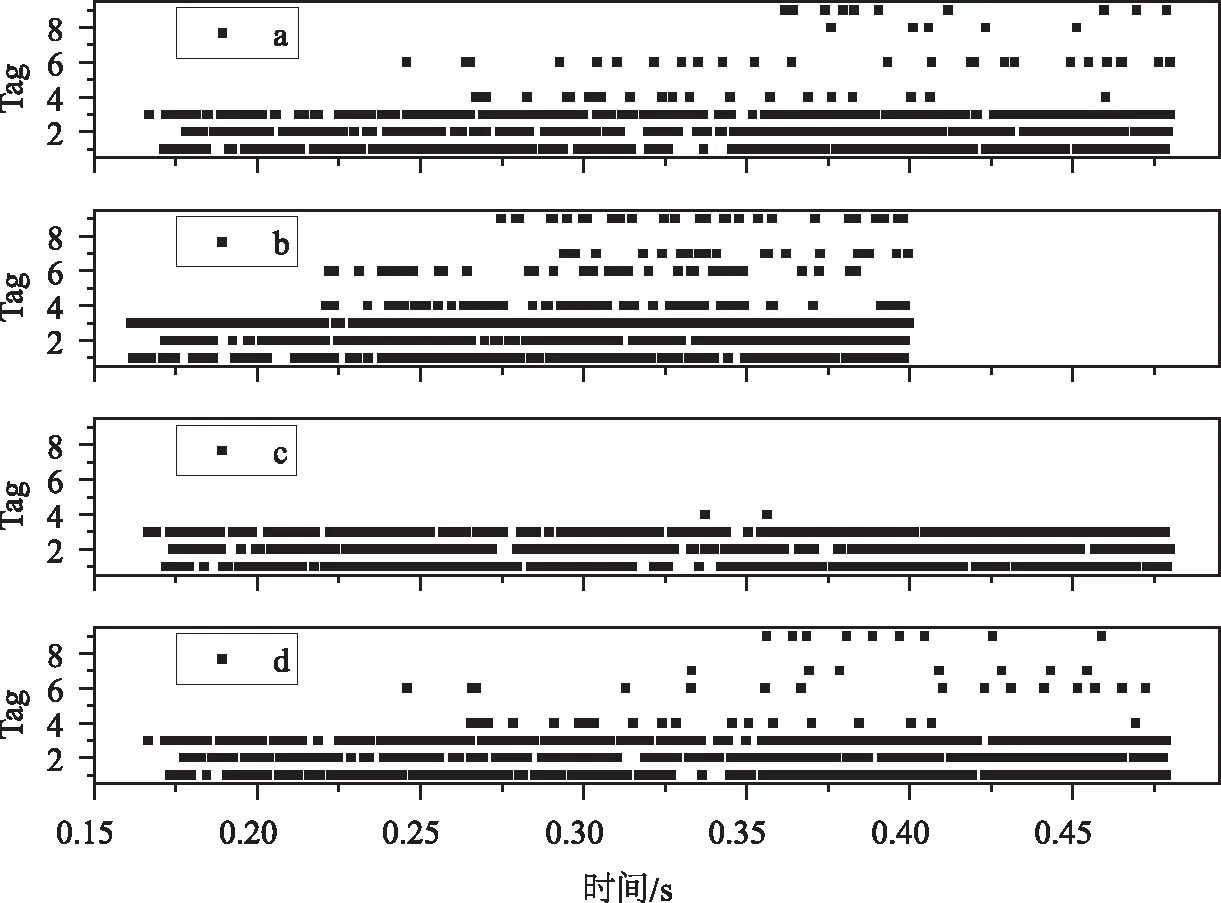
图12 不同阵列布置下对颗粒的捕集时间分布
3 结论
基于LBM方法计算了圆柱阵列表面的积灰过程、形貌和特性,在本文的计算条件下,得到如下结论:
1) 当颗粒的直径与计算域中圆柱直径数量级相当时,流场会影响颗粒运动,同时颗粒的堆积又影响了流场;
2) 圆柱阵列的布置情况对颗粒捕集效率有重要影响,与常规顺排阵列布置相比,采用“前宽后窄”型阵列,其捕集效率最高,采用“中空”型阵列,其捕集效率变化不大。
3)圆柱阵列中,后排圆柱附近流场受前排遮挡影响,其捕集颗粒数量相对较小。
