仿人思维智能控制策略
2022-04-24王培进张景辉
王培进,张景辉
(烟台大学计算机与控制工程学院,山东 烟台 264005)
前馈控制和反馈控制是2种最基本的控制原理[1],如图1和图2。反馈控制是指闭环反馈控制,在实际应用中最为常见的控制模式。反馈控制其实是用过去的情况来指导现在和将来。在控制系统中,如果返回信息的作用是抵消输入信息,称为负反馈,它可以使系统趋于稳定;若其作用是增强输入信息,则称为正反馈,它可以使信号得到加强。自动控制系统中的闭环反馈控制系统都是负反馈控制系统(图2)。
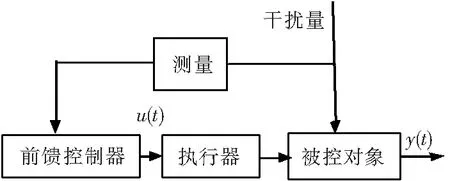
图1 前馈控制原理
闭环反馈控制的特点是:被控量变化在前,控制在后,是基于被控量的控制。控制的根本目的是抑制干扰、消除干扰,保持被控量的稳定和达到给定的期望值。如果没有干扰,当被控量达到给定值后,会一直保持不变。由于干扰的存在,使被控量远离给定值,因而施加控制,让其回归到给定值附近,偏差越小越好,一般符合给定的偏差要求(控制精度)即可。由此可见,反馈控制既可以抑制可见干扰,也可以抑制不可见干扰,这是它的优点。它的缺点是只有被控量变化了,才施加控制,控制动作有点滞后。
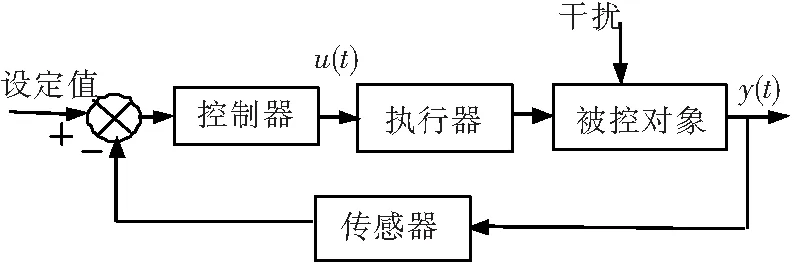
图2 闭环反馈控制原理
前馈控制与反馈控制恰好相反,是控制在前,变化在后,是基于干扰量的控制。前馈控制是在苏联学者所倡导不变性原理的基础上发展而成的。20世纪50年代以后,在工程上,前馈控制系统逐渐得到了广泛的应用。前馈控制的优点是克服干扰速度快。但是,前馈控制实现的前提是干扰量必须是可测的,而且如果已知干扰量对被控量干扰的数学模型,控制效果最好。实际控制系统有许多干扰因素是不可见、不可测的,建立数学模型也比较困难。因此,前馈控制一般不单独使用,可以与反馈控制一起构成前馈-反馈控制系统,即复合控制策略。
此外,从输出信息是否反馈看,分开环和闭环控制。开环控制是最简单的一种控制方式,它的特点是:按照控制信息传递的路径,控制量与被控制量之间只有前向通路而没有反馈通路。也就是说,控制作用的传递路径不是闭合的,故称为开环。在开环控制中,控制器只管施加控制作用,至于控制的效果没有反馈。如果有反馈,也仅仅是显示,反馈的信息没有给控制器。开环控制虽然不能克服干扰的影响,但是当系统稳定后,如果没有干扰的作用,采用开环控制,控制器输出保持不变,执行机构无动作,一方面有利于系统的稳定,另一方面减少执行机构的损耗,延长执行机构的寿命。因此,开环控制也有其优点,在实际控制过程中,根据被控系统的状态,采用开闭环切换控制策略,是最佳控制策略。
1 传统复合控制策略及缺点
在流程工业中,过程是复杂的,变量比较多,具有时滞,并且可能具有不同类型的非线性。因此,传统的控制策略(如反馈控制策略)不一定最好[2]。因此,为了控制这种类型的系统,一般采用复合控制策略。复合控制策略是由两个及两个以上简单控制策略组合起来的控制一个或同时控制多个参数的控制策略。复合控制的目的是使系统既具有开环控制系统的稳定性,又具有闭环控制系统的精度。常用的复合控制策略有:前馈-反馈、串级、前馈-串级等。
图3是前馈-反馈控制系统中最典型的结构形式。前馈-反馈控制的优点:(1) 从前馈控制角度看,由于增加了反馈控制,降低了对前馈控制模型精度的要求,并能对没有测量的干扰信号的扰动进行校正;(2) 从反馈控制角度看,前馈控制作用对主要干扰及时进行粗调,大大减少反馈控制的负担;(3) 由于被控对象的惯性,反馈控制作用有延迟,而前馈没有延迟,能够及时地在被控对象到达反馈控制之前就能抵消掉,因此,前馈比反馈更加及时;(4) 开环系统没有稳定性的问题,补偿前后稳定性不变。
图4是串级控制系统原理。与简单的单回路控制系统相比,串级控制采用了两个闭环反馈回路,一个闭环在里面,称为内回路或者副回路;另一个闭环在外,称为外回路或者主回路。副回路在控制过程中负责粗调,主回路则完成细调,串级控制就是通过这两条回路的配合控制完成普通单回路控制系统很难达到的控制效果。
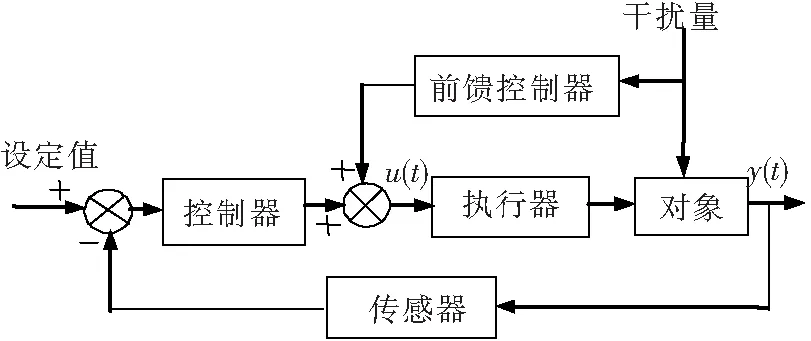
图3 前馈-反馈控制

图4 串级控制原理
如图5,前馈-串级控制系统是工业生产中很常见的一种系统,它是将前馈控制和串级控制结合起来的复合控制系统。这样既发挥了前馈控制能够克服主要干扰被控参数影响的优点,又保持了串级控制能抑制各种干扰的优势,同时也降低了对前馈控制器的要求,便于工程上的实现。
实现前馈-串级控制需要测量3个量:一个被控量,2个主要干扰量。前馈控制器的输出和主控制器的输出的和作为副控制器的设定值,这是其特点。前馈-串级控制相比于其他复合控制策略,控制精度更高,稳定性更好。
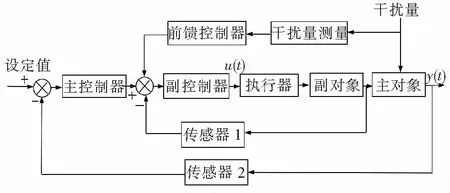
图5 前馈-串级控制原理
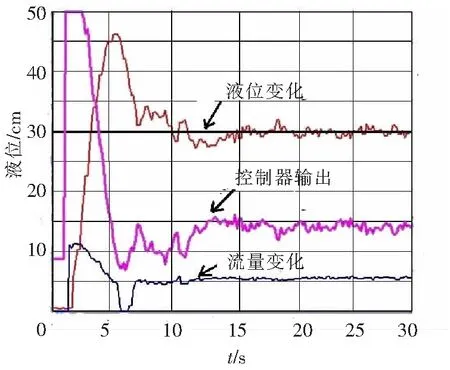
通常把反馈控制、前馈-反馈控制、串级控制、前馈-串级控制等控制策略称为传统控制策略。文献[3]研究了基于PID控制器的各种控制策略仿真实验结果,图6是液位实际控制曲线。通过文献[3]研究结果及其实际应用结果看,无论PID参数如何优化,控制过程震荡、超调不可避免,“稳、快、准”三个性能指标之间的矛盾无法克服。纵观其他参考文献的研究,结合实际控制中的应用,无论用PID控制器还是其他控制器,基于传统控制策略的控制系统,在实际应用过程中存在如下不足:

图6 液位实际控制曲线
(1)在设计控制器时,其算式主要体现了被控量变化的偏差、偏差的变化,即依赖被控量变化大小来施加控制,没有考虑被控量变化的方向、速度、趋势因素,例如:PID控制器、模糊控制器等。
(2)控制过程一直是连续的、闭环反馈控制,没有开、闭环切换,只要有偏差存在,控制器就有输出,执行器就有控制动作,被控量震荡难免,执行器寿命也会缩短。
(3)控制过程的采样周期、控制周期是固定的,因为基于算式编好的程序,在执行过程中是不能更改的。这种固定的采样周期、控制周期,使控制过程显得机械、刚性,缺少灵活性。
(4)各种智能控制方法虽然模拟了人工控制思想,但在控制过程中缺少挖掘控制经验与技巧功能,缺少分段控制策略,即:在不同的控制阶段采用不同的控制策略和方法。
(5)没有依据被控量、干扰量动态变化特性施加控制。
(6)在控制过程中,难以协调“稳、快、准”三个控制性能指标之间的矛盾,控制过程出现震荡、超调在所难免。
要克服上述缺点,必须向人的控制智慧学习。事实上,人脑是世界上最优秀的控制器。自动化系统把人“解放了”,在控制算法方面,提出了很多智能控制算法,但在控制策略方面,却没有很好地学习人的控制智慧。研究的核心点就是将人的控制智慧和上述传统控制策略相结合,提出基于人控制智慧的仿人思维智能控制策略。
2 仿人思维控制理论简介
仿人思维控制理论揭示人的控制思维机理和控制智慧,克服当前控制理论在设计控制器时存在的不足,并用计算机模拟、实现,解决难以建模的系统控制问题。在人工控制过程中,基于控制思维体现出来的控制智慧主要表现在如下几个方面[4-12]:
(1)实现开环、闭环切换
一个有经验的控制专家,能够根据被控量变化情况,在控制过程中随时进行开、闭环控制切换。在初始控制阶段,采用闭环反馈控制;当被控量达到给定控制要求且相对稳定时,转换为开环控制,保持控制量输出不变,执行器无动作,采取“等一等、看一看”的控制策略。只有当被控量因干扰量的影响远离给定值时,又转换为闭环控制,直到被控量达到给定控制要求再转换为开环控制。这种开环、闭环切换控制策略能够增加被控量的稳定性,也能延长执行器的寿命。
(2)分段控制,不同阶段采用不同控制方法
将人工控制过程划分为三个阶段:初始控制阶段、调整学习阶段、抗干扰控制阶段。在初始控制阶段,被控量偏差大,要求输出较大控制量,快速消除偏差,抽象逻辑推理控制思维发挥主导作用,动态响应快。当被控量达到给定的控制精度要求范围之内时,则进入调整学习阶段。在该阶段,采取“等一等、看一看、调一调”的控制策略,同时积累控制经验,形象直觉推理控制思维逐渐发挥主导作用。当被控量符合控制要求时,进入抗干扰控制阶段。控制的根本目的就是抑制干扰、消除干扰,如果没有干扰,被控量一直是稳定的且保持当前值不变。在抗干扰阶段,边克服干扰,边继续积累控制经验,形象直觉推理控制思维将发挥核心作用。
(3)依据被控量变化的大小、方向、速度、趋势确定控制策略
人工控制的最大智慧在于能够根据被控量当前变化的大小、方向、速度、趋势四个因素来确定下一步控制策略,属于形象直觉推理控制思维的范畴。例如,当前被控量偏差较小,被控量向设定值变化,变化速度较慢,变化趋势是趋向于稳定,则可以采用开环控制策略,保持当前控制量输出不变,“等一等、看一看”。反之,当前被控量偏差较大,被控量向远离设定值变化,变化速度较快,变化趋势是趋向于偏差增大,则采用闭环控制策略,加大控制量输出,尽快减小偏差,改变被控量变化方向,使其从远离给定值方向改变为接近给定值方向变化。当被控量变化趋势发生改后,由于被控量是在向接近给定值方向变化,此时可以减小控制量,直到保持控制量输出不变,转换为开环控制。
将被控量变化的大小、方向、速度、趋势定义为被控量变化的四个特征状态变量,其取值是离散的[4]。
(4)采样周期、控制周期在控制过程是可变的
在开环控制过程,控制周期是延长的,采样周期也可以加长,这样可以克服一些瞬间(脉冲)干扰带来的影响。在闭环控制过程中,采样周期、控制周期也可以根据上述四个特征状态变量情况进行调整。
(5)控制过程实时挖掘控制经验与技巧,指导控制过程
人工控制过程与当前控制理论确定的控制过程区别之一在于人能够边控制、边总结控制经验,然后将控制经验用于控制过程;而依据当前控制理论设计的控制器(控制算法),只是机械地按照给定的算法输出控制量,缺少控制经验挖掘、应用这个智能环节。
(6)依据被控量、控制量、干扰量的动态特性以及它们之间的关系确定控制策略
对于一个被控量,在没有干扰的情况下,施加一个脉冲控制量,观察其脉冲响应,可分为三种情况:发散、收敛、震荡。这三种情况反映了被控量变化的动态特性,根据不同变化特性采用不同控制策略。例如,对于具有收敛特性的被控量就非常容易实现开、闭环切换控制。
对于干扰量,可分为四种类型:定常干扰、瞬间(脉冲式)干扰、规律性干扰、随机干扰。对于不同的干扰类型,采用不同的控制策略。例如,如果干扰是瞬间干扰,被控量又具有收敛特性,当干扰来时,尽管被控量当前值发生了变化,但可以不施加控制动作,保持控制量输出不变。因为,当干扰消失后,被控量会自动恢复到原来值。这种控制策略可以避免被控量有变化就采取控制动作而引起系统的不稳定。
(7)能够有机地融合人的思维智能、动觉智能、视觉智能
控制思维由大脑产生,体现人脑的思维智能;人的眼睛是“传感器”,具有视觉智能;人的手、脚是“执行器”,具有动觉智能。事实上,人工控制过程是三种智能的有机融合的控制过程,还可以保证控制系统的安全性。这是一种伟大的控制智慧,是其它任何控制方法所不能比拟的。
(8)能够协调“稳、快、准”三个控制性能指标之间的统一
根据以上人工控制智慧,人工控制过程完全可以实现既快又稳又准的控制性能要求,可以实现动态响应快、超调量少、调整时间短、控制精度高且稳定的控制目标。
根据上述人的控制智慧,我们提出了如下智能控制策略:仿人思维智能前馈-反馈控制、仿人思维智能串级控制、仿人思维智能前馈-串级控制。定义如下几个参数:
(1)umax,控制量最大输出;
(2)umin,控制量最小输出;
(3)un,当前控制量;
(4)Δu,控制量单位变化量Δu=1/(umax-umin);
(5)r, 被控量设定值;
(6)yn,被控量当前值;
(7) 当前偏差:en=r-yn;
(8) 偏差的变化:Δen=en-en-1;
(9)ε,控制精度;
(10)εmax,最大允许控制精度;
(11)dn,当前干扰量值。
3 仿人思维智能前馈-反馈控制策略
图7给出了仿人思维智能前馈-反馈控制原理,前馈控制器和反馈控制器输出作为仿人思维控制器(Human-Thinking Simulated Controller,HTSC)的输入,仿人思维控制器发挥如下作用:
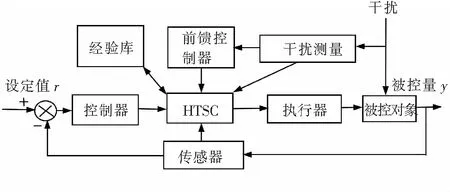
图7 仿人思维智能前馈-反馈控制原理
(1)在初始控制阶段,采用我们提出的三步控制法:
第一步:根据设定值r大小,输出一个较大控制量,被控量将快速向给定值变化。
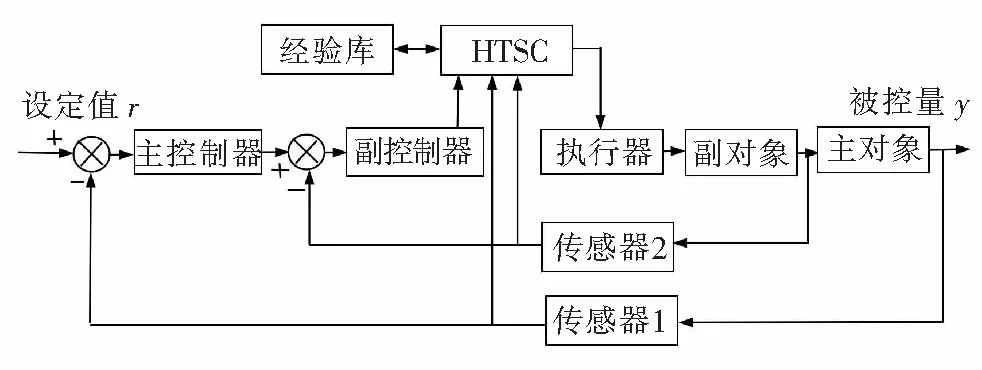
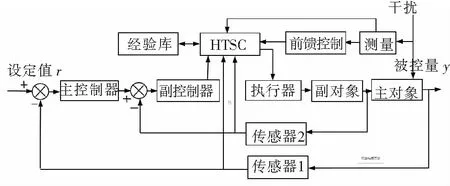
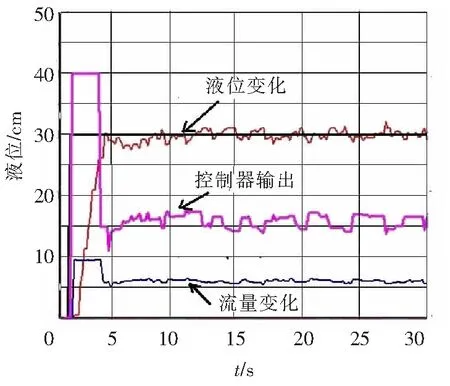
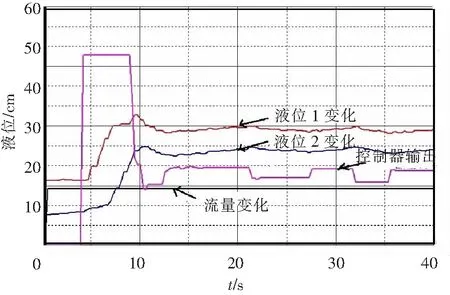
u0=umax×K0, 0.5 第二步:当被控量接近给定值时,减小控制量。 Ifyn≥r×(1-f), 0.1 thenu1=umax×K1, 0 第三步:当被控量进入控制精度要求范围,输出稳态控制量预估值。 Ify≥r×(1-ε) thenu2=uH。 稳态控制量预估值uH可以利用被控量和控制量之间的近似分段线性关系,由r求得。 三步控制法模拟人的控制思维,可以实现快速的动态响应。 (2)当被控量满足如下条件,进入调整学习阶段: Ify≥r×(1+ε)。 在调整学习阶段,仿人思维控制器选择反馈控制器的输出作为控制量输出,使被控量达到给定的控制精度和趋向稳定。 (3)在抗干扰阶段,仿人思维控制器依据被控量的状态和干扰量的变化特征来输出相应的控制量: 如果被控量稳定,又符合控制精度要求,|e|≤ε,此时如果出现的是脉冲式瞬间干扰,而且被控量变化具有收敛特性,则仿人思维控制器保持当前控制量输出不变,采用开环控制。 如果被控量稳定,又符合控制精度要求,|e|≤ε,此时的干扰量变化很小,|dn-dn-1|<ε1,则仿人思维控制器保持当前控制量输出不变,采用开环控制,“等一等,看一看”。 如果 |e|≤ε,干扰量变化超出要求,|dn-dn-1|>ε1,仿人思维控制器接受前馈控制器输出。 如果 |e|>εand |dn-dn-1|>ε1,仿人思维控制器接受反馈控制器和前馈控制器二者的和作为控制量输出,闭环控制。 如果 |e|>εand |dn-dn-1|<ε1,仿人思维控制器接受反馈控制器作为控制量输出,闭环控制。 从闭环控制到开环控制的切换条件: |e|≤εand |Δe| ≈0, ore=0。 在控制过程中,仿人思维控制器还承担着挖掘控制经验与技巧的作用,模拟人的控制智慧。控制经验采用如下表达形式: IfX1andX2andX3andX4and ΔDthenu。 X1、X2、X3、X4是被控量变化的大小、方向、速度、趋势等四个特征量,其定义和取值见文献 [4]。ΔD是干扰量变化大小,其定义跟被控量变化大小一致。u是控制量输出值。当积累了丰富的控制经验后,仿人思维控制器根据当前被控量变化、干扰量变化直接输出相应的控制量,克服干扰、消除干扰,很好地模拟了人的控制思维。图7中的控制经验库,根据人工控制经验,可以设置初始的控制经验,然后在控制过程中逐步完善。控制经验的挖掘算法见参考文献[4]。 如前所述,前馈控制优点是克服干扰快,在被控量变化前施加控制动作,同时其缺点也是抗干扰能力差,无论什么因素的干扰,只要有扰动,前馈控制器就有输出,执行器就有动作,被控量产生调整,引起波动。仿人思维控制器的加入,克服了上述缺点,能够根据干扰量的变化情况、干扰量的类型施加控制,同时实现了开闭环切换,实现“稳、快、准”三个控制性能指标之间的统一。 图8是仿人思维智能串级控制原理,与传统串级控制策略不同,副回路的输出给仿人思维控制器,仿人思维控制器输出给执行器。仿人思维控制器发挥如下作用: (1)在初始控制阶段,仿人思维控制器采用如前所述的三步控制法,提高系统的动态响应。 (2)在调整学习阶段,接受副回路控制器输出,直至系统达到给定的控制要求。 (3)在抗干扰阶段,仿人思维控制器采取如下控制策略。 如果被控量稳定,又符合控制精度要求,|e|≤ε,此时副回路参数变化很小,|dn-dn-1|<ε1,则仿人思维控制器保持当前控制量输出不变,采用开环控制,“等一等,看一看”。 如果 |e|≤ε,但副回路变化超出要求,|dn-dn-1|>ε1,仿人思维控制器接受副回路控制器输出,闭环控制。 如果 |e|>ε,仿人思维控制器接受副回路控制量输出,闭环控制。 在控制过程中,仿人思维控制器边控制、边挖掘控制经验与技巧,如前所述。 图8 仿人思维智能串级控制原理 图9是仿人思维智能前馈-串级控制原理,涉及3个物理量:1个被控量、2个直接影响被控量的干扰量。与传统前馈-串级控制策略不同,副回路的输出和前馈控制器的输出给仿人思维控制器,仿人思维控制器输出给执行器。仿人思维控制器发挥如下作用: (1)在初始控制阶段,仿人思维控制器采用如前所述的三步控制法,提高系统的动态响应。 (2)在调整学习阶段,接受副回路控制器和前馈控制器的控制量的和输出,直至系统达到给定的控制要求。 (3)在抗干扰阶段,仿人思维控制器采取如下控制策略: 如果被控量稳定、又符合控制精度要求,|e|≤ε,此时副回路参数变化和前馈通道干扰量变化很小,则仿人思维控制器保持当前控制量输出不变,采用开环控制,“等一等,看一看”。 如果 |e|≤ε,副回路参数变化很小,前馈通道干扰量变化很大,则仿人思维控制器接受前馈控制器的控制量输出,闭环控制。 如果 |e|≤ε,副回路参数变化很大,前馈通道干扰量变化很小,则仿人思维控制器接受副回路控制器的控制量输出,闭环控制。 如果 |e|>ε,前馈通道干扰量变化很小,仿人思维控制器接受副回路控制量输出,闭环控制。 如果 |e|>ε,虽然副回路参数和前馈通道干扰量变化很小,这是由不可见干扰造成的不稳定,仿人思维控制器接受副回路控制量输出,闭环控制。 在控制过程中,仿人思维控制器边控制、边挖掘控制经验与技巧,如前所述。当积累了丰富控制经验后,仿人思维控制器转换为依据控制经验和技巧施加控制动作,采取开、闭环切换控制策略,提高系统稳定性。 图9 仿人思维智能前馈-串级控制原理 实验系统采用文献[13]中介绍的实验装置。 (1)智能前馈-反馈控制实验 图10是传统前馈-反馈控制实时曲线(图3所示控制原理),图11是智能前馈-反馈控制实时曲线(图7所示控制原理)。比较图11与10,很显然,智能前馈-反馈控制实现了动态响应快、超调量小和开、闭环切换等控制优点。 图10 传统前馈-反馈控制曲线 图11 智能前馈-反馈控制曲线 (2)智能串级控制实验 图12是传统串级控制实时曲线(图4所示控制原理),图13 是智能串级控制实时曲线(图8所示控制原理)。比较图13与12,很显然,智能串级控制实现了动态响应快、超调量小和开、闭环切换等控制优点。 图12 传统串级控制曲线 图13 智能串级控制曲线 (3)智能前馈-串级控制实验 实验结果如图14,同样实现了动态响应快、超调量小和开、闭环切换等控制优点。 由图11、13、14,三种智能控制策略均取得了:(1)动态响应快、超调量小;(2)控制量输出非连续性波动,实现开、闭环切换;(3)实现“稳、快、准”控制性能指标。 图14 智能前馈-串级控制曲线 人工智能与控制相结合实现的智能控制,目前仅仅注重智能控制算法的研究,忽视人工控制智慧在控制策略方面的智能。将智能控制算法和控制过程的智能控制策略相结合,将是完美的智能控制。 传统的反馈控制、前馈-反馈控制、串级控制以及前馈-串级等控制策略,在实际应用过程中仅仅依赖控制算法,缺少人工控制智慧。我们将仿人思维控制方法与传统控制策略相结合,提出了仿人思维智能前馈-反馈、仿人思维智能串级、仿人思维智能前馈-串级控制策略,克服传统控制策略在实际应用过程中存在的不足,其实质就是将智能控制算法和控制过程的智能控制策略相结合,取得了很好的实验结果,实现控制过程“稳、快、准”的有机统一。上述智能控制策略已经嵌入到我们研制的仿人思维控制仪表中[14],在实际中将得到应用。4 仿人思维智能串级控制策略
5 仿人思维智能前馈-串级控制策略
6 实 验


7 总 结
